|
|

|
|
|
|||||||





 |
|
|
|

|

|

|
Опции темы | Поиск в этой теме |
|
|
|
|
|
|||||||
| |
|
|
|
|
|
|
Опции темы | Поиск в этой теме |
|
|
#1 (ссылка) |
|
Кандидат в V.I.P.







Регистрация: 14.05.2015
Сообщений: 193
Поблагодарил: 0 раз(а)
Поблагодарили 8 раз(а)
Фотоальбомы:
не добавлял
Репутация: 0
|
Тема: [03-2015] Инновационная технология плавного управления тормозными средствамиИнновационная технология плавного управления тормозными средствами А.Н. ШАБЕЛЬНИКОВ, директор Ростовского филиала ОАО «НИИАС». д-р.техн.наук И.А. ОЛЬГЕЙЗЕР, главный научный сотрудник, канд.техн.наук С.А. РОГОВ, заместитель начальника отдела Ключевые слова: сортировочная горка, универсальный алгоритм плавного непрерывного управления тормозными средствами, многоступенчатая управляющая аппаратура ВУПЗ-05Э, эффективность и качество сортировочного процесса Ростовский филиал ОАО «НИИАС» разрабатывает и внедряет новые алгоритмы регулирования скорости отцепов на сортировочных горках [1, 2]. В связи с поставленными ориентирами руководства ОАО «РЖД» на снижение эксплуатационных затрат [3] специалисты института работают в направлении повышения качества вытормаживания отцепов, равномерного распределения нагрузки тормозного воздействия на колесные пары и увеличения прогнозируемости динамических характеристик подвижных единиц в любой момент роспуска [4]. ■ К моменту внедрения восьмиступенчатой управляющей аппаратуры ВУПЗ-05Э с новым типом пневматических замедлителей КЗПУ разработан алгоритм плавного непрерывного управления тормозными средствами. Такой алгоритм универсален. Он обеспечивает функционирование с любой управляющей аппаратурой с восьмью и более ступенями управления. Благодаря равномерному воздействию тормозных шин замедлителя по всей протяженности отцепа исключается вероятность динамических ударов и снижаются средняя и максимальная величины динамической нагрузки на замедлитель и подвижной состав. В результате уменьшаются эксплуатационные расходы. При этом повышается прогнозируемость динамических характеристик подвижных единиц по сравнению с импульсными методами торможения, увеличивается надежность и качество торможения в автоматическом режиме. За счет большого количества градаций управляющих воздействий (ступеней) возрастает качество регулирования скорости подвижных единиц. Энергоэффективность работы замедлителя повышается за счет исключения многократного его растормаживания во время торможения одного отцепа, что приводит к отсутствию потерь сжатого воздуха. В итоге снижаются эксплуатационные расходы. Взаимодействие разработанного программного модуля, реализующего алгоритм, с проходящим заводские испытания электронным блоком управления клапанами БУК-Э/М10-5 позволит в дальнейшем в автоматическом режиме подстраивать ступени управления без вмешательства обслуживающего персонала дистанции. В алгоритме применяется непрерывное торможение при превышении отцепом расчетной скорости. Ступень управления изменяется без растормаживания прямо в процессе торможения исходя из текущей ситуации. Таким образом, в каждый момент времени торможение отцепа происходит на минимальной достаточной ступени, имеющей некоторый регулируемый запас по времени для обеспечения безопасности. Эта ступень рассчитывается на основе доступного для торможения времени с учетом скорости и длины отцепа и длины замедлителя, а также по энергетическим характеристикам доступных ступеней управления. Исходя из весовой категории отцепа конфигурируются максимальные и минимальные управляющие воздействия в зависимости от характеристик управляющей аппаратуры и замедлителя. Одновременно с торможением отцепа анализируется эффективность воздействия на предмет соответствия реального тормозного эффекта расчетным значениям. При этом происходит адаптация параметров управления. Для приемлемой автоматической настройки параметров управления при использовании такого метода достаточен проход одного-двух отцепов, состоящих из нескольких вагонов. Алгоритм плавного непрерывного управления тормозными средствами опробован в начале 2013 г. на станции Новая Елов-ка Красноярской дороги в ходе опытной эксплуатации нового замедлителя КЗПУ с управляющей аппаратурой ВУПЗ-05Э, имеющей электронный регулятор давления. Первые результаты испытания метода плавного управления показали, что повысились качественные показатели торможения по сравнению с традиционным импульсным, которое применяется на старых образцах медленной управляющей аппаратуры ВУПЗ-72. Графики плавного торможения одиночного и двухвагонного отцепов второй весовой категории с применением нового алгоритма приведены на рис. 1 и 2 соответственно. Анализ динамики торможения наглядно показывает плавное, без резких скачков, снижение скорости. Оно происходит за счет переключения при торможении ступеней управления с учетом текущего рассогласования скорости отцепа и расчетной скорости, а также оставшегося времени на торможение без растормаживания замедлителя между переключениями. Графики падения скорости практически идентичны вне зависимости от количества вагонов в отцепе. Это является основным преимуществом плавного торможения, позволяющим повысить его качество, прогнозируемость падения скорости, равномерно распределить нагрузку при торможении на замедлитель и колесные пары. 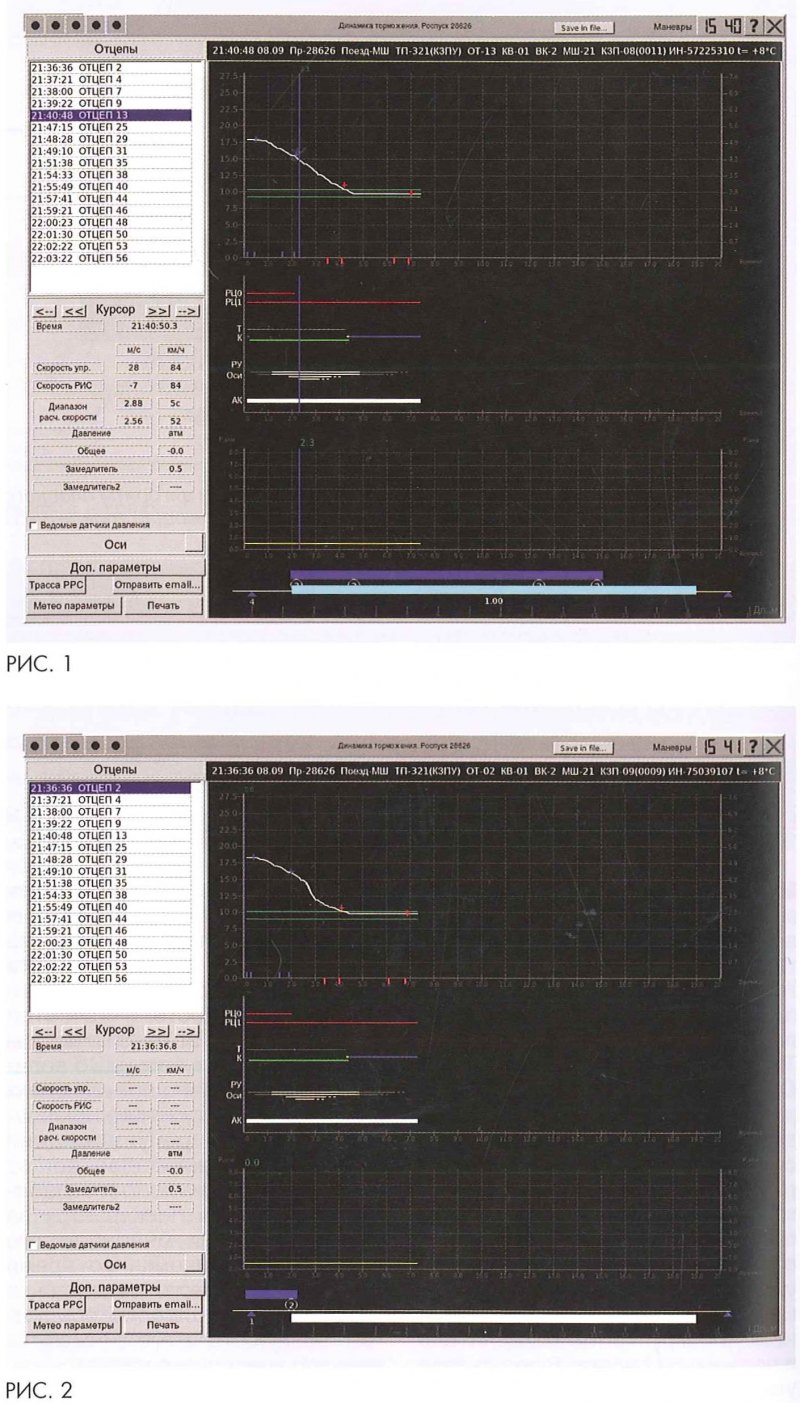 В течение месяца на станции Новая Еловка в рамках климатических испытаний элементов системы ТВК фирмы Siemens проверялись на совместимость многоступенчатый гидравлический однорельсовый вагонный замедлитель TW-4F фирмы Sona и комплексная система автоматического управления сортировочным процессом КСАУ СП, разработанная Ростовским филиалом ОАО «НИИАС». Пробный роспуск, который проводился в присутствии комиссии по приему замедлителя в опытную эксплуатацию, показал 100 %-ное качество торможения. Статистика торможения замедлителя TW-4F под управлением КСАУ СП представлена в таблице. 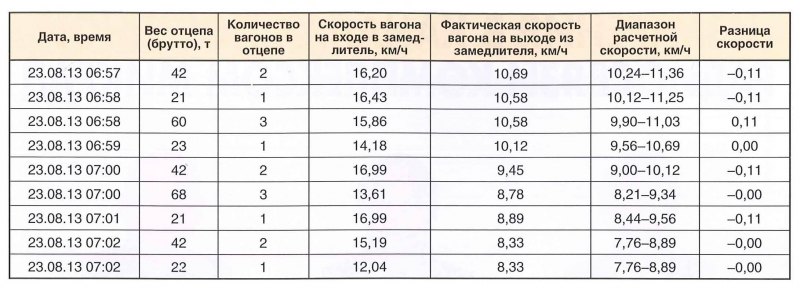 После завершения отладочного периода второго этапа испытаний качество торможения замедлителя TW-4F превысило уровень, заданный для испытаний (90 %), и оставалось стабильным до завершения испытаний. Качественные показатели работы гидравлического замедлителя TW-4F под управлением КСАУ СП превышают показатели пневматического замедлителя КЭПУ лишь на 2-5 % из-за большей стабильности на малых ступенях управления. Динамика торможения отцепов замедлителями TW-4F под управлением КСАУ СП представлена на рис. 3. 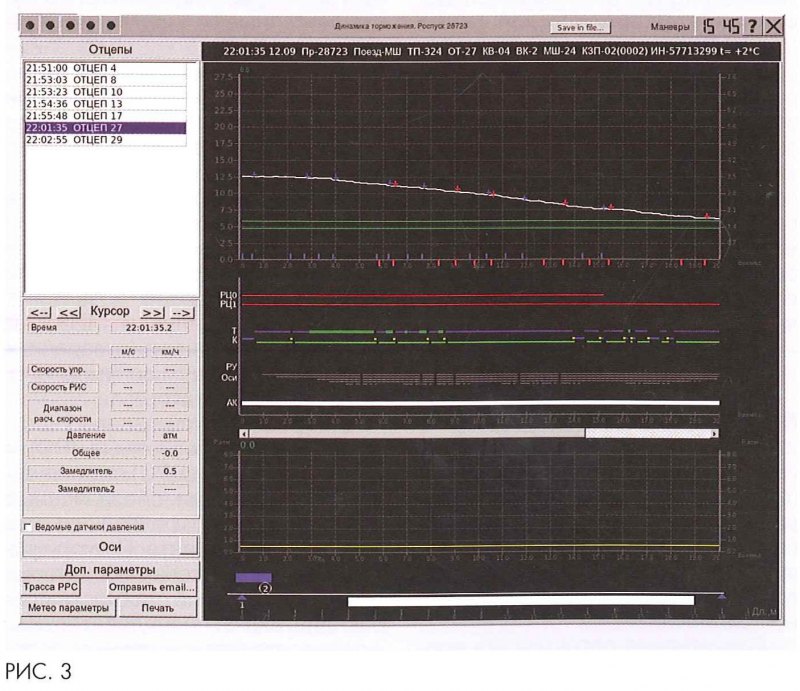 В ходе испытаний выявлен ряд недостатков замедлителя TW-4F. Показатели его быстродействия значительно уступают современным отечественным пневматическим замедлителям, например КЗПУ, и при таком большом количестве ступеней торможения являются неудовлетворительными. Чтобы исключить этот недостаток, необходимо повысить быстродействие замедлителя либо снизить количество ступеней управления без увеличения времени перехода между ступенями. Еще не определены стабильность работы замедлителя TW-4F в условиях зимы и резкого перепада температур, стоимость его жизненного цикла, а также на сколько он прост в обслуживании. Таким образом, практическая ценность и результат использования технологии плавного непрерывного управления тормозными средствами в совокупности с современными образцами как отечественной, так и зарубежной техники (пневматическими и гидравлическими замедлителями) в настоящий момент превосходят все имеющиеся отечественные и зарубежные аналоги. ЛИТЕРАТУРА: 1. Шабельников А.Н., Иванченко В.Н., Ковалев С.М., Лябах Н.Н., Соколов В.Н., Одикадзе В.Р., Сачко В.И. Системы автоматизации сортировочных горок на основе современных компьютерных технологий. Учебник для вузов железнодорожного транспорта. Под общей редакцией проф. А.Н. Шабельникова. - Ростов-на-Дону: НИИАС, РГУ ПС, 2010, 436 с. 2. Ольгейзер ИЛ. Анализ работы замедлителей парковых тормозных позиций. // Ольгейзер И.А., Афонин К.В., Оленич Д.А. - М.: Автоматика, связь, информатика, 2007, с. 27-28. 3. Гапанович В.А. Задачи и перспективы инновационного развития отрасли. - М.: Автоматика, связь, информатика, 2007, № 11. 4. Золотарев Ю.Ф. Перспективы развития КСАУ СП на сортировочных станциях // Золотарев Ю.Ф., Ольгейзер И.А., Рогов С.А. - М.: Автоматика, связь, информатика, 2012, с. 9-10. |
|
|
Цитировать 0 |
|
|
#2 (ссылка) | |
|
Super V.I.P.

Регистрация: 24.01.2011
Адрес: Калининград
Возраст: 63
Сообщений: 9,079
Поблагодарил: 1793 раз(а)
Поблагодарили 2156 раз(а)
Фотоальбомы:
710 фото
Репутация: 673
|
Цитата:
Пора на дачу...
__________________
Россия - Калининград. Границы разные, страна - одна. Я хотел бы служить кондуктором в трамвае, а уж хуже этой работы нет ничего на свете. |
|
|
|
Цитировать 1 |
|
|
#3 (ссылка) |
|
Робот

Регистрация: 05.05.2009
Сообщений: 2,464
Поблагодарил: 0 раз(а)
Поблагодарили 82 раз(а)
Фотоальбомы:
не добавлял
Репутация: 0
|
Тема: Тема перенесена |
|
|
Цитировать 0 |
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| [02-2013] Цепи управления реверсивными и тормозными переключателями электровоза ВЛ11К | Admin | xx2 | 0 | 12.05.2013 06:31 |
| Технология проверки КТСМ средствами Микар. | Андрей13 | КТСМ / ПОНАБ | 2 | 27.04.2011 13:12 |
| [Статья] Инновационная технология обеспечения сохранности грузов | Admin | Ж/д статьи | 0 | 27.11.2010 15:11 |
| Технические решения увязки устройств ЭЦ со схемами управления упорами тормозными стационарными (УТС-380) - 419607 | Толян | Приборы и напольное оборудование | 0 | 17.01.2010 10:22 |
| Технология проверки КТСМ мобильными средствами МИКАР | СЦБист | Системы централизации и блокировки | 0 | 17.05.2009 08:12 |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|
 Справочник
Справочник