|
|

|
|
|
||||||||
| Последние сообщения на форуме |
| Последние комментарии к фото |
| Новые записи в дневниках |
| Новые комментарии в дневниках |
| Новое в группах |
| Ссылки сообщества |
| Социальные группы |
| Поиск по форуму |
| Поиск по метке |
| Расширенный поиск |
| Найти все посты, за которые поблагодарили |
| К странице... |
 |
|
|
|

|

|

|
Инструменты Статьи | Поиск в этой Статье |
|
#1
|
Общие сведенияЭЦ-ЕМ — микропроцессорная централизация стрелок и сигналов, разработанная в России. На современном этапе развития представляет собой гибридную ЭЦ, в которой все зависимости (установка, отмена, размыкание маршрутов при проследовании поезда и т. д.) выполнены программным способом с соблюдением высокого уровня безопасности, а управление напольным оборудованием (стрелки, светофоры, рельсовые цепи, кодирование участков и др.) выполняется при помощи реле. По состоянию на 2025 года на сети железных дорог России работает свыше 200 комплектов ЭЦ-ЕМ, в том числе ЭЦ-ЕМ станции Бологое Октябрьской дороги - самая крупная микропроцессорная централизация в России (свыше 200 стрелок). С развитием и массовым внедрением вычислительной техники и созданием на их основе средств автоматического управления в ряде зарубежных стран различными фирмами были созданы и начали внедряться системы электрической централизации, все логические зависимости в которых, включая зависимости, решающие вопросы безопасности, были возложены на вычислительную технику. Необходимо отметить, что возникли новые проблемы с техническим обслуживанием устройств, так как кроме персонала, умеющего обслуживать релейную технику, потребовался персонал, знающий программное обеспечение и умеющий обслуживать вычислительную технику. Тем не менее выявились и существенные преимущества микропроцессорных систем, заключающиеся в неограниченных возможностях логики, стоимостных показателей с учетом перспективы снижения цен на вычислительную технику и роста цен на изделия из цветных металлов, а также комплектность устройств. Созданная в начале шестидесятых годов блочная система маршрутно-релейной централизации (БМРЦ) не удовлетворяла возросшим эксплуатационным требованиям, а созданная с учетом дополнительных логических зависимостей в восьмидесятые годы система ЭЦ-И, учитывающая дополнительные логические эксплуатационные требования, привела к полутора-двухкратному увеличению расхода реле и, соответственно, к увеличению площади релейного помещения. В то же время при микропроцессорной системе электрической централизации площадь, занимаемая под релейное помещение, сокращается примерно в два раза. И если при новом строительстве такое сокращение площади мало что дает, так как площадь, занимаемая релейным помещением на посту электрической централизации, составляет не более 20 % от общей площади, то следует учитывать, что на сегодняшний день большинство станций уже оборудовано электрической централизацией. В этом случае при замене действующей системы электрической централизации на ЭЦ-И требуется строительство пристройки к существующему посту или строительство нового поста электрической централизации. В то время как при замене действующей системы электрической централизации на МПЦ можно обойтись лишь несущественной перепланировкой помещений и косметическим ремонтом. В 1986 году институт «Гипротранссигналсвязь» приступил к разработке отечественной микропроцессорной системы электрической централизации ЭЦ-Е. В качестве вычислительной техники при разработке системы был принят отечественный промышленный троированный управляющий вычислительный комплекс ПС 1001, выпускаемый НИИ-УВМ г. Северодонецк (Украина). Система ЭЦ-Е разрабатывалась как универсальная для применения на станциях с числом стрелок от 10 до 100 с централизованным размещением на посту ЭЦ всей логической и управляющей аппаратуры и рабочего места дежурного по станции. Наряду с общепринятыми технологическими функциями релейных систем ЭЦ в системе микропроцессорной централизации ЭЦ-Е введен ряд новых функций, таких как анализ логической занятости путей и участков пути при занятии их маршрутным порядком (с контролем их последующего освобождения маршрутным порядком для защиты от потери шунта), проверка всех условий безопасности по маршруту (кроме исключенных дежурным по станции под свою ответственность) при открытии и горении пригласительного сигнала, прекращение кодирования маршрутов при несанкционированном выезде подвижной единицы на маршрут до головы поезда, проверка свободности всех секций в маневровом маршруте при езде вагонами вперед (кроме первой секции, прилегающей к занятой) после вступления подвижной единицы на маршрут, исключение посекционного размыкания маршрута при проезде поездной единицей перекрытого светофора, индивидуальная выдержка времени для каждого отменяемого маршрута, размыкаемой секции и т.д. Кроме того, диалоговая подсистема системы ЭЦ-Е включает широкий спектр справочно-информационных и сервисных функций, в т.ч. возможность накопления маршрутов как по времени, так и по очереди. Все действия ДСП, реакция на них системы, состояние аппаратуры и технологическая ситуация на станции, сохраняются в защищенном от несанкционированного доступа архиве и могут быть в любой момент проанализированы. На основании анализа записей в архиве о работе напольного оборудования (рельсовых цепей, светофоров, стрелок и т.д.) могут быть заблаговременно выявлены неисправности станционных устройств СЦБ до их устойчивого проявления, что дает возможность создания на этой основе АРМ электромеханика. Управляющий вычислительный комплекс, решающий задачи централизации стрелок и сигналов, представляет собой центральное постовое устройство и соединенные с ним через соответствующие устройства сопряжения (интерфейсы) органы управления и контроля, котроллеры, управляющие работой вводно-выводных устройств, и сами вводно-выводные устройства. Система ЭЦ-Е по расположению аппаратуры является централизованной. Управление объектами централизации осуществляется с рабочего места дежурного по станции (РМ ДСП), которое оборудуется тремя персональными ЭВМ (ПЭВМ), а также имеет упрощенное пульт-табло прямопроводной индикации и управления. Во время функционирования системы две ПЭВМ находятся в рабочем режиме, одна — в холодном резерве. Каждая ПЭВМ физически связана с тремя вычислительными каналами УВК ПС1001. При больших районах управления допускается деление станции на зоны управления с выделением самостоятельных комплектов органов управления и контроля для каждой зон. Управляющий вычислительный комплекс используется вместо наборной и исполнительной групп традиционных релейных систем ЭЦ. Вместо табл. 1 класса применен дисплей ПЭВМ. Все управляющие реле в системе ЭЦ-Е разбиты на группы управления, количество которых зависит от величины и путевого развития станции. Управление объектами, входящими в группу, возможно только при условии получения импульсов контрольным реле этой группы, что говорит о соответствии обратных связей управляющим воздействиям. Управление является дублированным, т. е. производится по схеме «И» при одновременном возбуждении одноименных реле 1-го и 2-го направления. Система ЭЦ-Е является системой реального времени. Решение задач всех технологических функций системы ЭЦ-Е осуществляется циклически. Период цикла решения задач составляет 1 с. Технологические программы в системе ЭЦ-Е написаны на макроассемблере ПС1001 и не зависят от плана станции. Система ЭЦ-Е, центральным устройством которой является управляющий вычислительный комплекс ПС1001, предъявляет более жесткие требования к надежности системы энергоснабжения по сравнению с системами релейных централизаций — система энергоснабжения должна обеспечивать бесперебойное электропитание УВК ПС1001 и персональных ЭВМ рабочего места ДСП. Это достигается установкой источников бесперебойного питания (UPS), которые гарантируют непрерывное электропитание аппаратуры при пропадании электроснабжения на время до нескольких минут. Система ЭЦ-Е является единой для применения на всех малых, средних и крупных станциях (узлах, раздельных пунктах и разъездах) магистрального и внутризаводского железнодорожного транспорта России и стран ближнего зарубежья с поездными и маневровыми передвижениями. Посредством одного комплекта ЭЦ-Е может быть централизовано до 100 стрелок на станции. Впервые микропроцессорная система электрической централизации ЭЦ-Е была введена на станции Шоссейная. Всесторонние испытания системы показали ее работоспособность и правильность заложенных концепций. Было принято решение о создании в России отечественного современного специализированного УВК, максимально соответствующего жестким требованиям систем ЭЦ на микропроцессорной основе (МПЦ). Разработка нового управляющего вычислительного комплекса УВК была поручена АО Ассоциация «Радиоавионика» в условиях тесного взаимодействия с ГТСС и ПГУ ПС. В октябре 2000 года система ЭЦ-ЕМ с разработанным УВК была принята на станции Новый Петергоф. Внедрение отечественной микропроцессорной системы электрической централизации продолжается, что является важным шагом по пути научно-технического прогресса. История создания и внедренияПервая в России микропроцессорная система ЭЦ на микропроцессорной основе ЭЦ-Е была разработана специалистами института «Гипротранссигналсвязь» (ГТСС) по заданию Департамента СЦБ и представляла собой комплекс устройств, выполняющий централизованное управление стрелками и светофорами средствами вычислительной техники. После всесторонних испытаний, проводившихся при участии представителей Санкт-Петербургского университета путей сообщения и Октябрьской железной дороги эта система в 1997 г. введена в опытную эксплуатацию на ст. Шоссейная (18 централизованных стрелок). В системе ЭЦ-Е средствами вычислительной техники были реализованы задачи управления и контроля за технологическим процессом на станции, соблюдения всех зависимостей стрелок и светофоров с целью обеспечения безопасности движения поездов. Это стало возможным благодаря использованию созданного специалистами ГТСС уникального программного обеспечения, реализованного с учетом всех требований безопасности и позволяющего решать все технологические задачи централизации стрелок и светофоров на станции. Проверка комплекса прикладного программного обеспечения ППО на безопасность велась статическим, динамическим и функциональным методами тестирования. Испытания системы ЭЦ-Е проводились на ст. Шоссейная параллельно с работой релейной системы УЭЦ-М. Соединение между модулями связи с объектами и вычислительным комплексом осуществлялось через блоки управления связи с объектом, которые решали вопросы организации протоколов адресного обмена информацией с блоками расширения связи и с объектами управления. В системе ЭЦ-Е были реализованы три режима функционирования: - основной, который осуществляется при полной исправности комплекса устройств системы и предусматривает управление объектами централизации с высокой степенью безопасности; основной способ управления в этом режиме — маршрутный; - вспомогательный, который осуществляется при частичном выходе из строя напольных устройств низовой автоматики при полной исправности УВК ПС-1001 и предусматривает управление объектами централизации с несколько пониженной степенью безопасности по сравнению с основным режимом управления, так как часть ответственности берет на себя ДСП; - аварийный, который осуществляется при выходе из строя вычислительного ядра УВК ПС-1001 и предусматривает управление переводом стрелок и открытием пригласительных сигналов без проверки условий безопасности. Проведенные испытания и опытная эксплуатация ЭЦ-Е подтвердили работоспособность системы и правильность концепций, заложенных при ее создании. Вместе с тем возникла необходимость создания в России современного отечественного специализированного управляющего вычислительного комплекса УВК, максимально соответствующего жестким требованиям, предъявляемым к системам микропроцессорной централизации. Такой специализированный УВК был создан в АО «Радиоавионика» (Санкт-Петербург) при участии специалистов ПГУПС и ГТСС. На базе системы ЭЦ-Е с использованием этого УВК была разработана модернизированная система ЭЦ-ЕМ. Структура системыУправляющий вычислительный комплекс УВК РА-01 в системе ЭЦ-ЕМ служит для централизованного управления стрелками и светофорами и состоит из следующих функциональных частей: - блоков центральных процессорных устройств (БЦПУ), осуществляющих реализацию логических зависимостей при управлении технологическим процессом на станции с заданным уровнем безопасности; - блоков сопряжения (БС), обеспечивающих связь с центральным постовым устройством и программное управление блоком устройств связи с объектом и блоком устройств безопасного контроля и отключения; - блоков устройств связи с объектом (БУСС), обеспечивающих непосредственное управление объектами и контроль их состояния; - блоков системы ввода/вывода (СВВ), осуществляющих согласование контрольной и управляющей информации с ЦПУ; - блоков контроля (модулей ввода), осуществляющих контроль состояния напольных объектов на станции (МСИ); - блоков управления (модулей вывода МВУ с модулями безопасного контроля и отключения МБКО), осуществляющих управление напольными объектами на станции и исключающих выработку управляющих воздействий при потенциальных отказах; - пульта инженера-электронщика, позволяющего получить данные о состоянии технических средств УВК РА-01 (на основе Notebook). 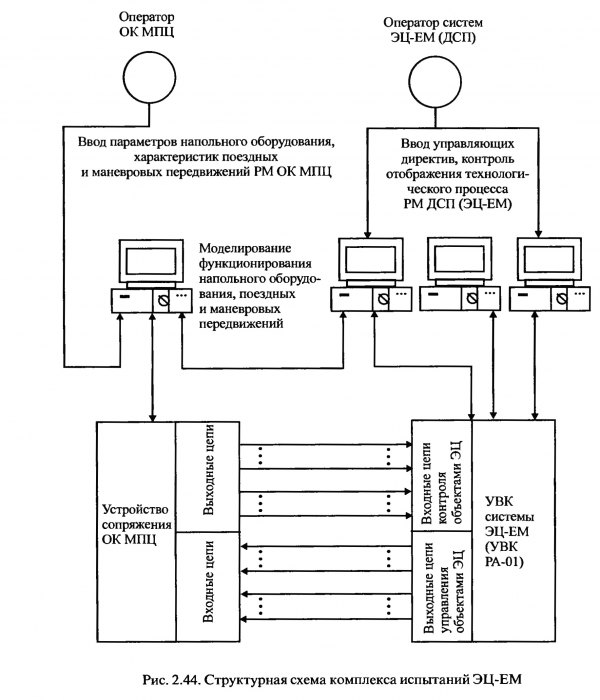 Объем аппаратуры для станций с количеством стрелок до 50 составляет 1 шкаф, от 50 стрелок и более — 2 шкафа. Программное обеспечение УВК включает в себя системное и инструментальное ПО, а также программный интерфейс с прикладными программами (или технологическое ПО ГТСС). Операционная система реального времени AVPTOS-16, используемая в УВК, разработана под требования безопасности на основе прообраза, который проверен опытом более 100 инсталляций в системах управления ответственными объектами. Для микропроцессорных систем централизации стрелок и светофоров на станции разработан проектным институтом ГТСС базовый отладочный комплекс ОК МПЦ, который предназначен для комплексной проверки функционирования систем МПЦ (рис. 2.44). Под комплексной проверкой понимают тестирование МПЦ на уровне внешних входов/выходов кода. В обработке входных тестовых сигналов участвует весь комплекс аппаратуры и программных средств МПЦ (УСО, УВК, системное и прикладное ПО). Технические средства ОК МПЦ включают ПЭВМ и устройства сопряжения. ПЭВМ используется в качестве рабочего места оператора отладочного комплекса и создается двумя последовательными интерфейсами с устройствами сопряжения ОК МПЦ и рабочим местом ДСП системы МПЦ. Устройство сопряжения выполнено в виде шкафа, содержащего контроллер, платы цифрового ввода/вывода и оптронных модулей. Последние обеспечивают гальваническую развязку электрических цепей, соединяющих ОК МПЦ и МПЦ. В ПЭВМ рабочего места ОК МПЦ реализованы основные функции отладочного комплекса: настройка на топологию станции, подготовка функциональных тестов, моделирование работы напольного технологического оборудования, имитация движения подвижных единиц и др. Устройства сопряжения управляющего комплекса МПЦ обеспечивают передачу сигналов, имитирующих состояние моделируемых объектов в адрес МПЦ, и прием от МПЦ управляющих сигналов. Процесс комплексной проверки функционирования системы МПЦ осуществляется в интерактивном и автоматическом режимах. Интерактивный режим используют, как правило, при отладке программного обеспечения МПЦ. В этом режиме ввод управляющих директив в МПЦ, задание параметров и условий моделирования технологических процессов осуществляются операторами МПЦ и ОК МПЦ. Контроль за ходом испытаний осуществляется визуально. Автоматический режим предназначен для проверки корректности формирования базы данных. Этот режим не требует участия человека. Формирование управляющих директив, моделирование технологических процессов и контроль за реакцией МПЦ происходит автоматически со стороны ОК МПЦ. С помощью ОК МПЦ была выполнена отладка прикладного программного обеспечения и комплексная проверка функционирования системы ЭЦ-ЕМ в лабораторных условиях ведущего проектного института ГТСС. Блоки центрального процессорного устройства реализуют центральные зависимости. Блоки сопряжения обеспечивают связь с центральным постовым устройством и программное управление блоком устройств связи с объектами и блоком устройств безопасного контроля и отключения. Блоки устройств связи с объектами обеспечивают непосредственное управление объектами и контроль их состояния. Блоки безопасного контроля и отключения исключают выработку управляющих воздействий при опасных отказах. Пульт инженера-электронщика предназначен для получения данных о состоянии технических средств УВК РА. Система МПЦ стрелок и светофоров на базе управляющего вычислительного комплекса УВК-РА типа ЭЦ-ЕМ с централизованным размещением аппаратуры на посту ЭЦ предназначена для применения на всех видах раздельных пунктов магистральных железных дорог. Основным отличием ЭЦ-ЕМ от релейных систем ЭЦ является использование микропроцессорной техники для решения задач центральных зависимостей. Помимо троированного управляющего вычислительного комплекса, реализующего задачи централизации стрелок и светофоров, в состав системы ЭЦ-ЕМ входят три ПЭВМ рабочего места ДСП (РМ ДСП), с которого ведется управление объектами централизации, упрощенный пульт-табло прямопроводного управления и индикации. В процессе функционирования системы две ПЭВМ находятся в рабочем режиме, одна — в холодном резерве. Каждая ПЭВМ физически связана с двумя различными вычислительными каналами УВК. По расположению аппаратуры система ЭЦ-ЕМ является централизованной, релейные и кроссовые стативы находятся на посту ЭЦ. Из релейной аппаратуры сохранены лишь пусковые блоки стрелок, схемы рельсовых цепей и цепи коммутации ламп светофоров. Система ЭЦ-ЕМ разработана с соблюдением всех принципов построения современных систем ЭЦ. Центральным звеном этой системы являются программно-аппаратные средства в составе технологического программного обеспечения и трехканального управляющего вычислительного комплекса, решающие все задачи по выполнению зависимостей ЭЦ в процессе управления напольными объектами и их контроля. В составе управляющего комплекса УВК-РА функционируют следующие основные подсистемы ЭЦ-ЕМ: - ввода/вывода, контролирующая и управляющая объектами низовой и локальной автоматики (светофоры, стрелки, переезды и др.); - диалоговая, обеспечивающая взаимодействие ДСП с УВК, а также связь ЭЦ-ЕМ с вышестоящими системами; - центральных зависимостей, реализующая выполнение технологических функций ЭЦ по централизации и блокировке стрелок и светофоров; - диагностики, обеспечивающая контроль исправного состояния всех блоков УВК, выявление отказов и отключение неисправной аппаратуры. Управляющий вычислительный комплекс (УВК), релейные и кроссовые стативы находятся на посту ЭЦ. Релейная аппаратура в системе ЭЦ-ЕМ используется для схем рельсовых цепей, непосредственного управления и контроля стрелками, светофорами и другим напольным оборудованием. Число используемых реле в этой системе составляет около 23 реле в пересчете на одну централизованную стрелку (в современных релейных системах ЭЦ на одну стрелку приходится 80—90 реле). Система ЭЦ-ЕМ разработана с соблюдением всех принципов построения современных релейных систем ЭЦ. Средствами микропроцессорной техники она обеспечивает реализацию всех функциональных задач по централизации стрелок и светофоров, необходимых для безопасного управления технологическим процессом на станции: установку, размыкание и отмена маршрутов; поддержание разрешающих показаний светофоров и кодирование маршрутов с проверкой всех условий безопасности; разделка маневровых маршрутов при угловых заездах; подача извещений на переезды; включение пригласительного сигнала; индивидуальный перевод и автовозврат стрелок; искусственное размыкание секций; установка и снятие макетов стрелок и изолированных участков; ограждение приемо-отправочных путей и др. Построение системы ЭЦ-ЕМ на базе вычислительной техники позволило дополнить состав традиционных технологических функций релейных систем ЭЦ целым рядом новых как технологического, так и информационно-сервисного характера. Среди вновь введенных технологических функций, направленных на повышение безопасности движения и увеличения эффективности управления технологическим процессом на станции, можно выделить следующие: -логический контроль занятия путей и участков пути маршрутным порядком и их последующего освобождения при проследовании подвижного состава для исключения возможности повторного открытия светофора на ложно освободившийся (при потере шунта) путь или участок пути; - возможность открытия пригласительного сигнала только при условии задания маршрута с проверкой всех условий безопасности при частичной неисправности напольных устройств (рельсовых цепей, стрелок), что позволяет снизить психологическую нагрузку на ДСП в таких ситуациях; - прекращение кодирования маршрутов до головы поезда при несанкционированном выезде подвижной единицы на маршрут; - проверку свободности всех секций в маневровом маршруте при движении вагонами вперед после вступления подвижной единицы на маршрут (кроме первой секции, прилегающей к занятой); - исключение посекционного размыкания маршрута при проезде подвижной единицей перекрытого светофора (при отказах); - возможность задания режима автодействия в любом поездном маршруте; - индивидуальную выдержку времени для каждого открываемого светофора; - индивидуальный отсчет выдержки времени для каждого отменяемого маршрута, размыкаемой секции и др. К информационно-сервисным функциям относятся: возможность накопления маршрутов как по времени, так и по очереди; формирование на экране ПЭВМ РМ ДСП различных сообщений о ходе технологического процесса, выдаче в необходимых случаях голосовых и звуковых сообщений; удобство ввода управляющих команд; возможность управления многопрограммной очисткой стрелок и др. Особо важной новой функцией является протоколирование и хранение в архиве всего хода технологического процесса и возможность использования всех сведений для анализа поездной ситуации и работоспособности устройств системы ЭЦ-ЕМ. На основе анализа записей из архива о работе напольного оборудования могут выявляться перемежающиеся неисправности напольных устройств ЭЦ, что дает возможность использования этой информации в АРМ электромеханика СЦБ. На первом этапе опытной эксплуатации системы ЭЦ-ЕМ дежурный по станции при задании маршрутов выполняет дополнительное замыкание стрелок путем снятия рабочего питания всех стрелок станции нажатием специальной кнопки дополнительного замыкания ЗПК. При этом на пульте прямопроводного управления и контроля включена индикация состояния рельсовых цепей и контроль положения стрелок для обеспечения возможности контроля ДСП правильности индикации на мониторе ПЭВМ РМ ДСП. Введение дополнительных мер безопасности обусловлено естественным желанием разработчиков «перестраховаться» на начальной стадии опытной эксплуатации системы. После успешного завершения этапа испытаний системы с дополнительными мерами безопасности и при условии, что не будет зарегистрировано ни одного опасного отказа, на втором этапе проведения опытной эксплуатации дополнительных мер безопасности не потребуется. На рис. 2.45 и 2.46 (вклейки) приведены схемы управления и контроля сигнальными показаниями входного светофора в системе ЭЦ-ЕМ. Выбор сигнальных показаний осуществляется фронтовыми контактами соответствующих сигнальных реле входного светофора Н: НС, НЗС, НМГС, НПС. Цепи возбуждения этих реле формируются через фронтовые контакты специальных интерфейсных сигнальных реле — НСИ, НЗСИ, НМГСИ, НПСИ. Интерфейсные реле типа Д3-2700 подключены к выходам модулей УВК. Таким образом, проверка необходимых условий обеспечения безопасности движения поезда в маршрутах приема на станцию выполняется программным способом средствами электронной техники. Питание ламп красного огня и лунно-белого (пригласительного) осуществляется полюсами питания ПО и МО от выпрямительного блока БВ с резервом от аккумуляторной батареи. Переключение ламп желтого и зеленого огней при перегорании основных нитей накала на резервные нити осуществляется тыловыми контактами вспомогательного реле соответствия НСО, расположенные в релейном шкафу, которое нормально находится в обесточенном состоянии (см. рис. 2.46). Это реле, являясь повторителем постового реле, получает питание через фронтовой контакт сигнального реле НС, т.е. при наличии команды на открытие входного светофора на посту ЭЦ. Горение на светофоре мигающего белого огня осуществляется фронтовыми контактами реле НПМГ и НФКМ. После срабатывания постового сигнального реле НПС импульсное питание ППЛМ и ПМЛМ подается в кабельные провода НПМГС и НОПМГС, к которым в релейном шкафу подключено реле НПМГ (контроля горения лампы лунно-белого пригласительного огня в мигающем режиме). Постовое пригласительное сигнальное реле НПС получает питание по обмотке 1-3 через фронтовой контакт интерфейсного реле НПСИ (см. рис. 2.45), а по обмотке 2-4 — через контакты нажатой кнопки НПС, расположенной на пульте аварийного управления системы ЭЦ-ЕМ (рис. 2.47). Контроль включения пригласительного сигнала осуществляется миганием контрольной лампы желтого цвета, расположенной на аварийном пульте ДСП. Импульсная работа реле НПМГ контролируется схемой двух контрольных реле: НФКМ и НТКМ. При замыкании фронтовых контактов реле НПМГ и НФКМ включается лампа лунно-белого огня, а при их размыкании — выключается. Исправность нити этой лампы контролируется огневым реле НБО (02-0,28/150). На время пауз тыловым контактом реле НПМГ организуется подпитка этого реле по высокоомной обмотке, что предотвращает его выключение. Перегорание основной и резервной нитей лампы красного огня приводит к выключению на посту ЭЦ повторительного огневого реле НКО, и на резервном пульте в мигающем режиме загорается контрольная лампа НКО. В случае возникновения различных неисправностей в релейном шкафу выключается контрольное реле НКИ (см. рис. 2.46). Его повторитель на посту ЭЦ также выключается и на аварийном пульте загорается лампа красного цвета неисправности НКИ (рис. 2.47, вклейка). Управление объектами централизации и их контроль выполняются в реальном времени с рабочего места дежурного по станции (РМ ДСП), оборудованного тремя ПЭВМ и упрошенным резервным пультом-табло прямопроводной индикации и управления (см. рис. 2.47). В процессе функционирования системы две ПЭВМ находятся в рабочем режиме, одна — в холодном резерве. Каждая ПЭВМ физически связана с двумя различными вычислительными каналами УВК. Установка маршрутов, положение стрелок, показание светофоров, состояние изолированных участков пути, стрелочных секций, приемо-отпра-вочных путей, участков приближения и удаления, а также других объектов контролируется на экране монитора РМ ДСП. При больших районах управления допускается деление станции на зоны управления с выделением самостоятельных комплектов органов управления и контроля для каждой из зон. Все комплекты РМ ДСП архивируют текущие события и предоставляют возможность ретроспективного просмотра состояния поездной обстановки. Взаимодействие каждого РМ ДСП и УВК осуществляется через группу интерфейсов последовательного обмена данных. Оперативная информация о ходе технологического процесса и состоянии объектов управления передается в ПЭВМ, входящие в состав РМ ДСП, и отображается на экранах их мониторов. ДСП имеет возможность вводить управляющие команды при помощи клавиатуры или манипулятора «мышь»; распечатывать при помощи принтера протокол работы устройств и действий ДСП. Сообщения используются для передачи информации ДСП от системы ЭЦ-ЕМ и выводятся на экран цветного дисплея. Основной экран по функциональному назначению разбит на отдельные области (окна): - окно сообщений (предназначено для вывода технологических и системных сообщений, пришедших с УВК); - окно запросов, которые требуют подтверждения каких-либо действий системы и сопровождаются звуковым сигналом (например, подтвердите или отмените необходимость снятия блокировки); - окно текущего состояния УВК и др. Технологические сообщения информируют ДСП о ходе технологического процесса, об изменении состояния напольных устройств и т.п. (например, задается маршрут, невозможна искусственная разделка, разомкнулась секция, запущено автодействие, смена направления, блокировка и др.). Системные сообщения информируют о состоянии и неисправности системы и требуют вмешательства обслуживающего персонала (например, отсутствие питания напольных объектов; сбой в программе УВК; отключение группы цепей управления или контроля; система СВВ работает в штатном режиме; система переключена на резервный пульт и др.). Сообщения об ошибках подаются при ошибках ДСП в наборе управляющей директивы. Контроль фидеров питания выведен на пульт-табло прямопроводного управления и контроля (см. рис. 2.47). Контроль изоляции цепей питания выведен на монитор ПЭВМ РМ ДСП и на пульт-табло прямопроводного управления и контроля. Дополнительный контроль работы микропроцессорной централизации ЭЦ-ЕМ осуществляется на АРМ электромеханика СЦБ. При задании маршрутов стрелки могут переводиться автоматически и индивидуально. Для индикации величины потребляемого тока при переводе на пульте прямопроводного управления установлен амперметр. При длительной работе стрелок на фрикцию предусмотрена директива «Выключение стрелки», а при аварийном управлении — кнопка-счетчик «СчВП» для выключения питания стрелок. Особенности построения отдельных элементов схем управления стрелками показаны на рис. 2.48. Автоматический перевод стрелок осуществляется через контакты управляющих интерфейсных реле ПУИ или МУИ типа ДЗ-2700, которые подключены к модулю МВУ. Для индивидуального перевода в плюсовое или минусовое положение на пульте аварийного управления расположены стрелочные кнопки (см. рис. 2.47), контактами которых выполнено подключение проводами РПУ и РМУ к тыловым контактам реле ПУИ и МУИ с проверкой свободности стрелочной секции. При ложной занятости секции ДСП использует кнопку-счетчик вспомогательного перевода установленным в инструкции ЦШ-530 порядком. Контроль положения стрелок в режиме работы с УВК организуется через модуль МСИ, а в индивидуальном режиме с аварийного пульта предусмотрены стрелочные контрольные реле, включенные по типовой схеме. Контактами этих реле включаются контрольные лампы на пульте по жилам КП, КМ и КО. Макет для выключения стрелок в системе ЭЦ-ЕМ (рис. 2.49) содержит макетный шланг; блок питания МБП; реле КМ — контроля подключения макета к линейным проводам выключаемой стрелки; КК — контроля замыкания контактов пускового реле при установке макета; МПК и ММК— контрольные стрелочные реле макета, имитирующие плюсовое или минусовое положение стрелки, выключенной из зависимости; МПП — противоповторное реле подключения макета, фиксирующее возврат коммутатора макета в исходное (среднее) положение. Подключение макета к пусковым и контрольным цепям управления выключаемой стрелки производится макетным шлангом, один конец которого подключается к клеммной панели стрелки на кроссовом стативе, а другой — к клеммной панели макета. В результате переменный ток, поступавший из контрольной цепи стрелки, подключенной к макету, через соответствующие клеммы подается на одну из обмоток трансформатора в блоке МБП. Вторичная обмотка трансформатора нагружена выпрямительным мостом, к выходу которого подключено реле контроля макета КМ. Это контрольное реле срабатывает. На пульте аварийного управления начинает мигать красная лампа К-М, а в релейном помещении загорается контрольная лампа ЛM. Если рукоятка макета находится в среднем положении, включается противоповторное реле МПП. В схеме выключаемой стрелки срабатывает управляющая цепь и подается напряжение в рабочую цепь. От этого напряжения в схеме макета включается реле КК Контакты реле КК, МПП и МПС замыкают цепь контрольного стрелочного реле макета МПК или ММК в зависимости от положения рукоятки коммутатора макета РКМ. Реле МПК (ММК) своими контактами подключает диоды VD1, VD2, имитирующие наличие выпрямительного столбика в контрольной цепи схемы управления, выключенной из централизации стрелки. 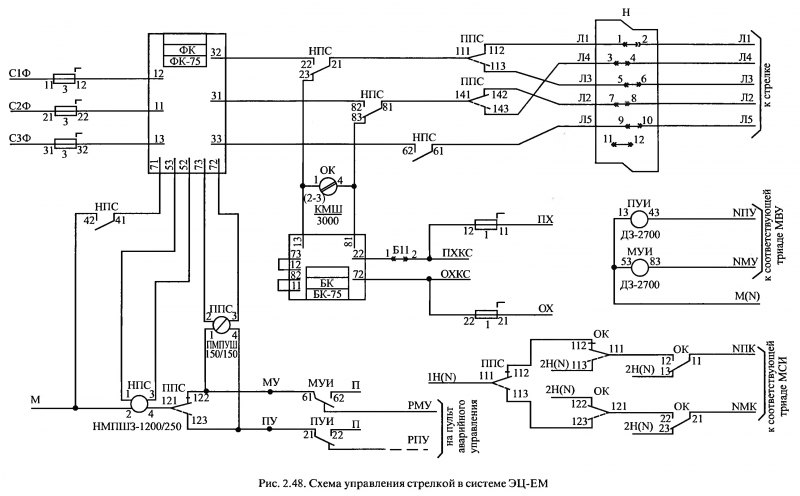 В поездных маршрутах светофоры открываются с контролем замыкания маршрута при свободном маршруте, соответствии положения стрелок по маршруту и охранных, отсутствия враждебных установленных маршрутов и свободности пути приема или одного участка удаления. Перекрываются светофоры по директивам отмены маршрута или блокировки светофора; при вступлении подвижной единицы за светофор (через 5—6 с при нормальном проследовании или через 3—4 с при движении короткой подвижной единицы по коротким рельсовым цепям); при наложении шунта на одну или несколько рельсовых цепей на время более 5 с; при пропадании контроля положения одной или нескольких стрелок на время более 5 с; при проявлении враждебностей; при неисправностях светофора, приводящих к его погасанию (например, перегорании основной и резервной нити лампы разрешающего показания); при нажатии кнопки экстренного перекрытия сигналов (СчАУ) на аварийном пульте-табло прямопроводного управления и контроля. Пригласительные сигналы светофоров в штатном режиме работы системы открываются с контролем замыкания и свободности маршрута, правильного положения стрелок по маршруту и охранных, отсутствия враждебностей и свободности пути приема или первого участка удаления, нажатия соответствующей кнопки пригласительного сигнала на пульте-табло аварийного управления и контроля (не осуществляется проверка отдельных условий безопасности, перечень которых был задан в директиве установки данного маршрута). Перекрывается пригласительный сигнал светофоров при отпускании кнопки; при вступлении на маршрут или при наложении шунта; при пропадании контроля положения стрелки на время более 5 с и при перегорании нити лампы лунно-белого огня. Маневровые светофоры перекрываются по специальным директивам: при вступлении маневрового состава за светофор и освобождении секции перед светофором или освобождении первой секции за светофором; осаживании состава; наложении шунта или при пропадании контроля положения стрелки; проявлении враждебностей; перегорании нити лампы белого огня; нажатии кнопки экстренного перекрытия сигналов. Отмена маршрутов позволяет: перекрыть светофор независимо от того, соблюдены или нет условия отмены; отказаться от установки маршрута, даже если секции еще не замкнуты; с проверкой условий безопасности разомкнуть все секции, входящие в данный маршрут (при свободном участке приближения к маршруту и соблюдении условий безопасности маршрут отменяется сразу и выдается сообщение, например: «Отмена маршрута от светофора М5»); при занятом участке приближения к маршруту и соблюдении условий безопасности маршрут отменить с выдержкой времени. При этом в начале выдержки для поездных маршрутов выдается сообщение: «СТвв=3 мин отменяется маршрут от Н2». Искусственная разделка секций выполняется введением директив для всех размыкаемых секций: ИР (секц. 1) (секц. 2) (секц. 3.) (секц. 4). После восприятия этих директив системой ЭЦ-ЕМ на схематическом плане станции отображается индикация искусственно разделываемых секций (мигающее изображение) и выдается сообщение о начале искусственной разделки данной секции: «Начата искусственная разделка...». Если по каким-либо причинам невозможно разомкнуть данную секцию, то выдается сообщение: «Невозможна искусственная разделка...». Такими причинами могут быть: попытка задания искусственной разделки; попытка задания искусственной разделки секции, входящей в маршрут с открытым светофором (во избежание перекрытия сигнала); попытка задания искусственной разделки секции, для которой директива искусственной разделки ранее уже введена, но секция еще не разомкнулась. В случае отказа микропроцессорных устройств, как было отмечено выше, предусмотрен пульт прямопроводного управления. Пульт-табло прямопроводной индикации и управления (см. рис. 2.47) используется в системе для выполнения некоторых специальных функций управления (кнопки включения режима горения сигналов «день/ночь», рукоятка для установки макета стрелки, ключ-жезл и др.). Режим аварийного управления позволяет ДСП осуществлять перевод стрелок, включать пригласительные сигналы, осуществлять вспомогательный перевод стрелок при ложной занятости стрелочных секций, устанавливать направление движения на прилегающих перегонах, а также получать информацию о состоянии рельсовых цепей и других объектов. Отказ от такого пульта прямопроводного управления возможен при переносе большинства специальных функций управления на ПЭВМ РМ ДСП. На пульте в таком случае могут быть сохранены только ключи-жезлы и рукоятка макета стрелки. Таким образом, в системе ЭЦ-ЕМ реализуются дополнительные информационно-сервисные функции: возможность накопления маршрутов как по времени, так и по очереди, формирование на экране РМ ДСП различных сообщений о ходе технологического процесса, удобство ввода управляющих команд и др. Вновь введенной функцией в системе является протоколирование хода технологического процесса (управляющих действий ДСП, реакции на них системы, состояния постового и напольного оборудования ЭЦ). Перечисленные сведения фиксируются и хранятся в архиве РМ ДСП, защищенном от несанкционированного доступа. Эти сведения могут быть в любой момент извлечены и проанализированы. На основании анализа записей архива о работе напольного оборудования (рельсовых цепей, светофоров, стрелок и др.) могут выявляться перемежающиеся неисправности напольных устройств, что дает возможность использования этой информации в АРМ ШН. Все эти введения позволили существенно облегчить труд ДСП и внесло в их работу элементы комфорта (например, формирование на экране монитора различных сообщений о ходе технологического процесса, выдачу в необходимых случаях голосовых и звуковых сообщений, удобство ввода команд, возможность управления многопрограммной очисткой стрелок и др.). Одним из достоинств МПЦ, является возможность ее непрерывного совершенствования с учетом постоянного совершенствования микропроцессорных и электронных технических средств. Дальнейшее развитие системы ЭЦ-ЕМ осуществляется по ряду следующих перспективных направлений: переходу на бесконтактные устройства управления напольными объектами ЭЦ (стрелками, светофорами и др.); частичной децентрализации системы при управлении наиболее удаленными напольными объектами (более 3,5 км); совместной реализации функций ЭЦ и систем перегонной автоматики (с общим управляющим вычислительным комплексом); сопряжения с каналообразующей аппаратурой линейных пунктов ДЦ; дополнения технических средств ЭЦ-ЕМ аппаратурой АРМа для электромеханика. История создания В начале 1996г. руководство МПС РФ объявило конкурс на создание микропроцессорного управляющего вычислительного комплекса для систем железнодорожной автоматики. Учитывая то обстоятельство, что ряд специалистов отдела специализированных вычислительных систем имел опыт по разработке и внедрению отказоустойчивых безопасных управляющих систем, руководство ОАО «Радиоавионика» предложило им принять участие в этом конкурсе. Целью такой работы являлась замена устаревших релейных систем контроля и управления движением поездов на системы нового поколения, основу которых составляли бы микропроцессорные отказоустойчивые безопасные вычислительные комплексы (УВК). В кратчайшие сроки были подготовлены предложения по технической реализации УВК, осуществлен выбор базовой операционной системы, создано техническое описание, определены экономические показатели, а также производственные мощности для изготовления УВК. В конкурсе приняло участие несколько организаций, в том числе и институт управляющих машин. Объем представленных данных, и, в первую очередь, предложенная концепция достижения необходимого уровня безопасности и отказоустойчивости в работе УВК склонила чашу весов в пользу ОАО «Радиоавионика». С этого времени, собственно, и началась работа по созданию тиражируемого УВК разработки ОАО «Радиоавионика» (УВК РА), являющегося основой систем электрической централизации и автоблокировки. Первая отечественная система электрической централизации стрелок и сигналов на базе УВК РА с интегрированными функциями микропроцессорной автоблокировки (ЭЦ-ЕМ/АБТЦ-ЕМ), спроектированная специалистами ОАО «Радиоавионика» совместно с отраслевым институтом «Гипротранссигналсвязь», была установлена в конце 1999г. на станции Новый Петергоф, где в течение 2000г. прошла опытную эксплуатацию. В 2001г. эта система была введена в постоянную эксплуатацию, что дало основание Департаменту сигнализации, централизации и блокировки МПС РФ принять решение о тиражировании подобных систем на сети железных дорог России и утвердить соответствующую программу внедрения. Объемы и сложность поставленных задач потребовали существенного пополнения коллектива. Уже к 2001г. был сформирован научно-технический центр (НТЦ УВК), включавший отделы по разработке программного обеспечения, конструированию и разработке технических средств УВК РА. А уже примерно через год на базе НТЦ УВК был создан научно-технический комплекс железнодорожной автоматики и телемеханики (НТК ЖАТ), в котором, кроме программистов, разработчиков и конструкторов УВК РА, появились специалисты СЦБ (сигнализация, централизация, блокировка). Создание НТК ЖАТ позволило существенно расширить фронт работ. В частности, это положило начало работ по разработке и внедрению совмещенной питающей установки, контрольно-согласующего устройства, был развернут комплекс работ по разработке, проектированию и сопровождению систем на базе УВК РА, которые могут применяться на железнодорожных станциях с поездными и маневровыми передвижениями (малые станции - до 30 стрелок, средние - от 30 до 70 стрелок, крупные - от 70 до 400 стрелок). Система ЭЦ-ЕМ/АБТЦ-ЕМ на базе УВК РА осуществляет в реальном времени сбор, обработку, хранение информации о текущем состоянии объектов централизации. На основании полученной информации реализуются технологические алгоритмы централизованного управления станционными напольными объектами с формированием и выдачей управляющих воздействий. Архитектура УВК РА основывается на трехканальной структуре и использовании электронных модулей из унифицированного ряда специализированных модулей собственной разработки. Наличие трехканальной архитектуры УВК РА, использование межканальных связей, принципа «мягкой» синхронизации между каналами, наличие в модулях встроенных элементов контроля позволяет обеспечить отказоустойчивое и безопасное функционирование системы под управлением УВК РА. Основу УВК РА составляют следующие входящие в его состав устройства: • центральное постовое устройство (ЦПУ); • устройство связи с объектом управления (УСО); • рабочее место дежурного по станции (РМ ДСП). ЦПУ предназначен для реализации алгоритмов централизации и автоблокировки, контроля и управления УСО, а также для взаимодействия с РМ ДСП. УСО обеспечивает сопряжение вычислительного ядра комплекса - ЦПУ - с объектами низовой и локальной автоматики станций и перегонов при выполнении требований по безопасности и безотказности. Взаимодействие УСО с объектами контроля и управления осуществляется через релейную часть системы путем выдачи управляющих воздействий (на обмотки реле 1-го класса надежности) и опроса источников информации (контактов реле). С помощью РМ ДСП осуществляется: • визуальный контроль поездного положения на станции и прилегающих перегонах; • контроль состояния напольного оборудования; • управление маршрутами и отдельными напольными объектами; • сигнализация неисправности системы. В целях обеспечения надежного и качественного электропитания УВК РА и устройств железнодорожной автоматики, в НТК ЖАТ разработана совмещенная питающая установка (СПУ) на базе устройств бесперебойного питания. СПУ обеспечивает подключение к трем независимым фидерам электроснабжения или двум фидерам и дизель - генератору и может применяться для электропитания микропроцессорных систем типа ЭЦ-ЕМ, МПЦ-2, релейных систем электрической централизации, систем автоблокировки АБТЦ-ЕМ, АБТЦ-М, АБТЦ. Средства встроенного контроля позволяют контролировать параметры тока, напряжения, температуры, в СПУ реализована увязка с системами верхнего уровня. В настоящее время на железных дорогах России внедрены более двухсот СПУ Важной составляющей систем ЭЦ-ЕМ набазеУВК РАявляется контрольно-связующее устройство (КСУ), которое обеспечивает сопряжение с системами верхнего уровня, сбор, регистрацию и отображение диагностической информации, формирование архивов. На настоящий момент на железных дорогах России системы ЭЦ-ЕМ/АБТЦ-ЕМ внедрены более чем на 90 ж.д. станциях. Следует отметить, что на протяжении всего десятилетия, в течение которого ОАО «Радиоавионика» поставляет системы электрической централизации, аппаратно-программные средства постоянно совершенствуются, что позволяет специалистам НТК ЖАТ улучшать технико-экономические показатели своих систем, сохраняя тем самым их конкурентоспособность. В установленных системах ЭЦ-ЕМ на первых трех станциях (Новый Петергоф, Жихарево, Назия) в качестве контроллеров использовались микропроцессорные блоки в стандарте микро-РС, в которых располагались платы микроконтроллера, ОЗУ а также плата сопряжения, обеспечивающая внешние связи. Как показал опыт, такое исполнение контроллеров не позволяло без существенных конструктивных доработок добиться устойчивой работы устройства в целом в условиях электромагнитных помех. Кроме того, явно отсутствовал запас по производительности вычислителей, что не позволяло увеличить количество используемых УСО, а, следовательно, препятствовало созданию систем для управления крупными станциями, для которых требовалась установка двух и более УСО, управляемых от одного ЦПУ Примерно в это же время (2002г.) со стороны МПС РФ был внесен ряд изменений в требования к электромагнитной совместимости (ЭМС). Появление более жестких требований привело к необходимости, наряду с разработкой нового контроллера, выполнить и доработку периферийных модулей сбора информации (МСИ), выходных усилителей (МВУ) в части повышения устойчивости к ЭМС. В результате был разработан микропроцессорный модуль контроллера (МК) в стандарте Евромеханика 6U на базе процессора CPU 686 (CPU 686Е), позволивший в дальнейшем приступить к решению проблем по управлению крупными станциями. Появившаяся при этом возможность установки МК непосредственно в блоке, в котором установлены периферийные модули, а также использование на уровне внешнего интерфейса дополнительных элементов защиты периферийных модулей привели к повышению помехоустойчивости и позволили решить проблемы по ЭМС в соответствии с новыми требованиями. Системы, в которых впервые были применены микропроцессорные модули типа МК (версия МК2), приняты в эксплуатацию на ст. Орехово и ст. Васкелово в 2004г. К безусловным достижениям НТК ЖАТ следует отнести разработки, позволившие, с учетом достигнутого запаса по производительности, обеспечить управление крупными станциями. Причем в каждой из разработок, что уже тогда стало нормой для специалистов НТК ЖАТ, закладывается определенный запас для дальнейшего развития системы. Так, например, на ст. Окуловка в установленной в 2006г. системе ЭЦ-ЕМ/ АБТЦ-ЕМ используется УВК РА с двумя УСО, причем установленное программное обеспечение позволяет подключать до четырех УСО. В 2008г. на ст. Рощино была запущена система, в которой в ЦПУ впервые был применен более совершенный модуль МК (версия МКЗ), превосходящий по производительности и функциональным возможностям МК2. Одно из последних по времени достижений - это запуск в постоянную эксплуатацию в 2011г. системы на ст. Бологое (207 стрелок) с двумя зонами управления и с использованием уже четырех УСО (при этом программное обеспечение позволяет осуществлять подключение до восьми УСО), управляемых от ЦПУ, реализованном на основе модулей МКЗ. Также в качестве знаковых разработок следует выделить системы на базе УВК РА, установленные на ст. Гатчина в 2007г., где впервые использованы два связанных друг с другом УВК РА, на ст. Вязники в том же 2007г., где также впервые одно из УСО установлено на удалении нескольких километров (так называемое «удаленное» УСО). Определенным этапом работ по усовершенствованию УВК РА, а, следовательно, и систем ЭЦ-ЕМ/АБТЦ-ЕМ в целом, следует считать, разработку УСО для бесконтактного управления огнями светофоров и стрелочными приводами (УСО-БК). Внедрение УСО-БК позволяет существенно сократить количество используемых в системе реле, повысить надежность и улучшить эксплуатационные характеристики системы. Запуск УСО-БК в опытную эксплуатацию осуществлен в июне 2011г. на ст. Молодежная Малой Октябрьской ж.д. В настоящее время проводятся работы по расширению опытной эксплуатации УСО-БК (использование двух и более УСО-БК). Системы ЭЦ-ЕМ/АБТЦ-ЕМ доказали свою эффективность, что подтверждается высокими показателями надежности: количество отказов на одну стрелку (по данным ЦШ от 2009г.) в 8 раз меньше, чем в релейных системах. На настоящий момент основная направленность проводимых специалистами НТК ЖАТ работ связана с расширением функциональных возможностей систем управления, сокращением времени их ввода в эксплуатацию, сокращением эксплуатационных расходов, что позволит сохранять конкурентоспособность систем и в дальнейшем. В этом плане следует отметить работы, которые требуется выполнить в самое ближайшее время. 1. Внедрение новых модификаций модулей микропроцессорных контроллеров (МК4 - в ЦПУ МКЗ - в УСО), обеспечивающих возможность расширения функций за счет наличия дополнительного числа интерфейсов при требуемой производительности вычислительных устройств. 2. Увязка систем ЭЦ-ЕМ/АБТЦ-ЕМ соседних станций между собой, увязка систем ЭЦ-ЕМ/АБТЦ-ЕМ с системами автоматического управления тормозами САУТ, системой интервального регулирования ИТАРУС, маневровой локомотивной сигнализацией МАЛС. 3. Применение тестирующего комплекса разработки НТК ЖАТ, существенно снижающего объем и трудоемкость проверок взаимозависимостей на объекте при вводе систем в эксплуатацию, позволяющего обеспечить высокое качество испытаний в заводских условиях, оперативно выявлять и устранять возможные проектные ошибки, в том числе ошибки программного обеспечения, что в конечном итоге позволяет значительно сократить время ввода системы ЭЦ-ЕМ/АБТЦ-ЕМ в эксплуатацию. 4. Внедрение контрольно-согласующего устройства КСУ РА с требованиями по безопасности, предъявляемыми к увязке с системами диспетчерского контроля ДК, централизации ДЦ. 5. Разработка и внедрение бесконтактного устройства связи с объектом для рельсовых цепей и кодирования (УСО РЦК). 6. Создание комплексной системы управления движением поездов КСАУД на основе данных спутниковой навигации и цифрового радиоканала: а)радиоблокцентр; б) интегрированный комплекс связи, навигации и обработки информации; в) система оповещения работающих на путях; г) система автодиспетчер. |
| Возможно вас заинтересует информация по следующим меткам (темам): |
|
,
,
,
,
,
,
,
,
,
,
,
|
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|
 Справочник
Справочник




