
|
|
|
|
#1 (ссылка) |
|
Создатель







Регистрация: 19.12.2009
Адрес: Россия
Возраст: 44
Сообщений: 1,267
Поблагодарил: 37 раз(а)
Поблагодарили 1415 раз(а)
Фотоальбомы:
2972 фото
Репутация: 60
|
Тема: [Статья] Имитационные модели в отладке систем управления роспуском составов на сортировочной горкеИМИТАЦИОННЫЕ МОДЕЛИ В ОТЛАДКЕ СИСТЕМ УПРАВЛЕНИЯ РОСПУСКОМ СОСТАВОВ НА СОРТИРОВОЧНЫХ ГОРКАХ М.А. ШАМАШОВ,канд. техн. наук В.В. МОХОНЬКО, главный инженер Самарского отделения Куйбышевской дороги А.Ю. ПАВЛОВ, аспирант Отладка программного обеспечения (ПО) систем реального времени (СРВ) - это процесс, трудоемкость которого может превышать 50-60 % общего объема работ по созданию таких систем. Если же рассматривать отладку не только как процесс выявления ошибок в уже разработанном программном продукте, а, в первую очередь, как процесс проверки правильности решений, принимаемых на различных стадиях проектирования системы, то приведенные цифры покажут нижнюю границу такой трудоемкости. Отладка в широком смысле - это непрерывный процесс, который желательно начинать на самых ранних стадиях проектирования системы. В общем случае существуют два метода отладки ПО СРВ. Первый - отладка с использованием реальных устройств связи с объектом (УСО) и объекта управления и исследования (ОУИ) (натурные испытания). Второй - отладка на базе имитационных моделей этих устройств и объекта. Применение первого способа во многих случаях невозможно или нецелесообразно. Наиболее важным аргументом в пользу применения имитационных моделей при отладке ПО СРВ является принципиальная способность подобной системы справиться с самыми важными и разнообразными проблемами отладки. Среди них: доступность ко всем моделируемым элементам, разнообразие методов управления, повторяемость, возможность введения аварийных ситуаций и обеспечения параллельных разработок аппаратуры и ПО СРВ [1]. В рамках методологии моделирования, используемой при втором методе отладки, УСО и ОУИ заменяются моделями, функционирующими в соответствии со строгими временными и логическими законо-мерностями, свойственными реальным устройствам и объекту. В данной статье обсуждаются подходы к отладке ПО в режиме моделирования автоматизированной системы управления технологическим процессом роспуска железнодорожных составов (АСУ ТП РЖС) на сортировочной горке, разработанной специалистами научно-производственного внедренческого предприятия "Технология движения" г. Самары. Ядро АСУ ТП РЖС составляют две во многом независимые подсистемы: автоматизированная система маршрутизации и контроля качества роспуска (АСМ) [2] и автоматизированное рабочее место оператора интервальных тормозных позиций (АРМ ОТП). Обе эти подсистемы функционируют на ПЭВМ IBM PC/AT. В основе их построения лежат магистрально-модульные принципы, основанные на механическом стандарте ЕВРОМЕХАНИКА и логическом стандарте, разработанном в НПВП "Технология движения". Они обеспечивают открытость подсистем и простоту их функционального наращивания. Каждая из подсистем управляется отдельным адаптером (адаптер "скорость" и адаптер "маршрут"), устанавливаемым в свободные слоты ПЭВМ и реализованным на базе программируемого параллельного адаптера (ППА) типа К580ВВ55. Через него осуществляется обмен адресами и данными. К адаптерам через магистраль подключается крейт, в котором могут находиться до 12 модулей устройства управления (УУ), устройства контроля (УК) реле и устройства измерения скорости и межосных расстояний, счета вагонов и осей (УИС). Каждый модуль УУ управляет 8 разделительными стрелками, модуль УК контролирует до 10 стрелок, УИС способно измерять скорость и межосные расстояния в 12 точках и подсчитывать число вагонов и осей в двух точках [3]. При отладке ПО АСУ ТП РЖС целесообразно использовать две ЭВМ. На одной из них (моделирующей ЭВМ) моделируются УСО и ОУИ, а на другой (инструментальной, в дальнейшем рабочей ЭВМ) ведется непосредственное выполнение отладки программного продукта. При таком подходе реально сохраняется параллельность процессов функционирования объекта управления и управляющего устройства. Кроме этого, процесс отладки происходит действительно в реальном, а не в системном времени [4], имитирующем реальное, что имеет место при использовании одной ЭВМ для отладки ПО и моделирования ОУИ. При отладке ПО СРВ и моделировании УСО и ОУИ на различных ЭВМ взаимосвязь между ПО и моделью осуществляется на уровне имитации регистровых передач, информационного обмена [5] и реального механизма прерываний ЭВМ с использованием стандартных асинхронных последовательных портов ввода/вывода RS232. Схема взаимодействия инструментальной и моделирующей ЭВМ в процессе отладки АСУ ТП РЖС представлена на рисунке. Рассмотрим алгоритмы функционирования устройств и программ подсистем АСМ и АРМ ОТП, а также модели, используемые для их отладки. Горку можно представить в виде двоичного дерева, узлами которого являются разделительные стрелки, а ветвями - направляющие пути. Корнем дерева служит головная стрелка. Ветви, соединяющие последние узлы с листьями дерева, являются подгорочными путями. Задача системы маршрутизации при роспуске состава состоит в задании такого положения разделительных стрелок для каждого отцепа, при котором этот отцеп достигает назначенного ему подгорочного пути. Такое положение стрелок для конкретного отцепа называется маршрутом. По мере движения отцепов по горке одни стрелки занимаются, другие освобождаются, к каждой из стрелок образуется очередь на ее занятие. При занятии i-й стрелки головным отцепом из очереди очередь к этой стрелке сокращается на один отцеп. Этот отцеп добавляется к очереди стрелки i+1, направление к которой задает i-я стрелка. Если стрелка является последней, то отцеп, достигший намеченного подгорочного пути, исключается из рассмотрения. При освобождении i-й стрелки она отмечается как свободная. Если i-я стрелка свободна и очередь к ней не пуста, сопоставляется ее положение с направлением движения отцепа из головы очереди к данной стрелке, и в случае необходимости стрелка переключается. АСМ обычно имеет несколько УУ. При переключении стрелки УУ должно удерживать сигнал на переключение некоторое время, обусловленное инерционностью срабатывания реле стрелки. В это время не должны задаваться переключения каких-либо других стрелок, управляемых этим же УУ. Учитывая это обстоятельство, стрелки, принадлежащие к одному модулю, должны переключаться через интервалы времени, не менее заданных Dt. При этом состояние и положение стрелок постоянно контролируются. Свободная стрелка, при наличии к ней очереди отцепов, инициирует запрос на свое переключение (если переключение необходимо), который добавляется к календарю событий (упорядоченному хронометрическому расписанию) [4] запросов к данному модулю УУ. В основе ПО АСМ лежит монитор реального времени (МРВ). Он контролирует состояние и положение стрелок и позволяет оптимально управлять их переключением. МРВ использует обе разновидности управления: интеррогативное для контроля состояния и положения разделительных стрелок и императивное для управления их переключением. Именно поэтому принцип функционирования ПО АСМ не является стандартным, - нельзя сказать синхронен он или асинхронен. Однако модель для отладки ПО АСМ, в которую входят модели разделительных стрелок и аппаратных средств АСМ, пассивна. Она лишь фиксирует изменения положения стрелок, "управляемых" отлаживаемым ПО, их занятость и освобождение, определяемые "движением" вагонов по горке. Модель для отладки работы ПО АСМ может быть описана в рамках системы с дискретными событиями. Здесь процесс функционирования системы во времени отождествляется с последовательностью событий, возникающих в ней в соответствии с закономерностями ее функционирования. Для данной модели время наступления событий определяется на основе моделирования движения отцепов по горке и зависит как от известных детерминированных факторов (топология горки, расстояние между стрелками и др.), так и от стохастических (количество вагонов в отцепе, скорость отцепа, длина и вес отцепа и др.). Функциональное описание модели УСО и ОУИ АСМ может быть выполнено с использованием следующих событий. EV1 - занятие стрелки.Моделируется занятие стрелки с номером i, т.е. моделируется включение реле состояния стрелки. Определяется время наступления событий занятия следующей стрелки и освобождения текущей. EV2 - освобождение стрелки.Моделируется освобождение стрелки с номером i, т.е. моделируется выключение реле состояния соответствующей стрелки. Если стрелка головная, то, кроме моделирования освобождения стрелки, определяется время наступления очередного события "Занятие головной стрелки". EV3 - переключение стрелки.Наступление этого события инициирует ПО АСМ. Определяется время наступления события "Конец переключения стрелки", моделирующего инерционность переключения. EV4 - конец переключения стрелки.Моделирует включение того или иного реле положения стрелки (МК или ПК). В УИС, используемых в АРМ ОТП, применяются измерители, условно разделенные на два типа: первый - "два датчика - одно колесо" и второй - "один датчик - два колеса". Суть их функционирования состоит в том, что при известном расстоянии между датчиками или колесами (осями) для определения скорости достаточно измерить интервал времени, за который либо одна ось последовательно проходит над датчиками, либо две оси над одним и тем же датчиком. Измеренный интервал будет обратно пропорционален скорости движения. Для проведения измерений скорости и межосных расстояний, счета вагонов и осей в УИС выделено четыре канала [3]. Принцип функционирования ПО системы измерения скорости, составляющей основу АРМ ОТП, асинхронен: движущийся вагон, его колесо, проезжая над датчиками, расположенными на полотне, инициируют запросы на прерывания. Программы обработки этих прерываний определяют скорость и межосные расстояния, подсчитывают число осей и вагонов. Поэтому модель для отладки ПО подсистемы измерения скорости активна. Она выставляет отлаживаемому ПО АРМ ОТП запросы на прерывания, связанные с "функционированием" путевых датчиков. Эту модель также можно описать в рамках системы с дискретными событиями. EV1 - начало движения отцепа. EV2 - наезд i-го колеса отцепа (где i нечетно) на первый датчик.Моделируется открытие входа счетчика первого канала. Начинается "подсчет" эталонной скорости. EV3 - наезд i-го колеса отцепа на второй датчик.Моделируется открытие входов счетчиков второго и третьего каналов и закрытие счетного входа первого канала с установкой разряда "регистр запросов" - запрос на прерывание от первого канала, сигнализирующего о завершении "подсчета" скорости. EV4 - наезд (i+1)-го колеса отцепа на первый датчик.Моделируется открытие входа счетчика первого канала и закрытие входа счетчика второго канала с выставлением запроса на прерывание от второго канала, оповещающего систему о возможности определения межосного расстояния. EV5 - наезд (i+1)-го колеса отцепа на второй датчик. 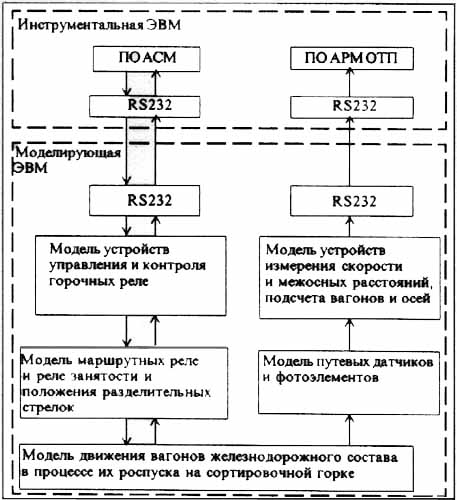 Моделируется открытие входа счетчика второго канала и закрытие входа счетчика третьего канала. Сигнализирует прерыванием от третьего канала о возможности получить новое значение скорости или откорректировать последнее межосное расстояние. EV6 - освобождение зоны измерения.Вырабатывается запрос на прерывание от четвертого канала, извещая о завершении отцепа и необходимости закончить формирование его характеристик. EV7 - событие пересчета времени.Время в модели пересчитывается по принципу Dt. При этом "движение по времени" происходит с постоянным шагом. Он равен периоду импульса генератора стабильной частоты УИС. Привязка пересчета времени к генератору необходима для отладки в реальном времени. В заключение отметим, что процесс отладки ПО с использованием модели основывается на следующих принципах. Отлаживается ПО, а не модель. Она лишь поставляет информацию, требуемую ПО с учетом динамики взаимосвязей в проектируемой системе. Отладка ведется в интерактивном режиме и начинается на самых ранних стадиях создания системы параллельно с разработкой аппаратуры. Описанные модели использовались при проектировании и отладке программно-аппаратных средств АСМ и АРМ ОТП, разработанных для ряда сортировочных станций Куйбышевской дороги. Опыт отладки на основе моделирования позволяет рассматривать такой подход как удобный и экономичный. При анализе же аварийных ситуаций он не имеет альтернативы. Литература 1. Программируемый имитатор внешней среды в задачах проектирования и отладки программного обеспечения систем реального времени./Бухаров М. А., Кораблин М. А., Шамашов М. А. и др. - Киев: "Управляющие системы и машины", 1986, № 4. 2. Шамашов М. А. Автоматизированная система роспуска железнодорожных составов на сортировочной горке. - В кн: Интеллектуальные системы в машиностроении. Материалы всесоюзной конференции. Ч.2. - Самара: ИМАШ АН СССР, 1991. 3. Шамашов М.А., Васин Н.Н., Мохонько В.П. Программно-аппаратный измеритель скорости и межосных расстояний, счетчик вагонов и осей. - М.:"Автоматика, телемеханика и связь", 1994, № 8. 4. Цифровая имитация автоматизированных систем. / Болтянский А.А., Виттих В.А., Шамашов М.А. и др. - М.: Наука, 1983. 5. Шамашов М. А. Функциональное описание и имитационные модели КАМАК-систем. - Киев: "Управляющие системы и машины", 1984, № 2.
__________________
Зарегистрируйтесь, чтобы скачивать файлы. Внимание! Перед скачиванием книг и документов установите программу для просмотра книг отсюда. Примите участие в развитии ж/д вики-словаря / Журнал "АСИ" онлайн Книги по СЦБ | Книги путейцам | Книги машинистам | Книги движенцам | Книги вагонникам | Книги связистам | Книги по метрополитенам | Указания ГТСС Если не можете скачать файл... / Наше приложение ВКонтакте / Покупаем электронные версии ж.д. документов |
|
|
Цитировать 0 |
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| Комплексная автоматизация управления компрессорными станциями (КСАУКС) сортировочных горок | Углев Дмитрий | Горочные системы | 2 | 24.01.2014 17:59 |
| Комплексная система автоматизированного управления сортировочной станцией (КСАУ СС) | Андрей13 | Горочные системы | 0 | 14.01.2011 23:54 |
| Комплексная система автоматизации управления сортировочным процессом КСАУ СП | Admin | Сортировочные горки, счетчики осей | 0 | 14.12.2010 20:32 |
| [Статья] Требования к конструкциям горочных сортировочных устройств | Толян | Статьи по СЦБ | 0 | 04.06.2010 21:49 |
| ИМИТАЦИОННЫЕ МОДЕЛИ В ОТЛАДКЕ СИСТЕМ УПРАВЛЕНИЯ РОСПУСКОМ СОСТАВОВ НА СОРТИРОВОЧНЫХ ГОРКАХ | Толян | Статьи по СЦБ | 0 | 10.02.2010 17:25 |
| Ответить в этой теме Перейти в раздел этой темы |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , , , , , , , , , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|








