



|
|
|
|||||||
|
|
#1 (ссылка) |
|
Crow indian







Регистрация: 21.02.2009
Возраст: 41
Сообщений: 30,455
Поблагодарил: 398 раз(а)
Поблагодарили 6046 раз(а)
Фотоальбомы:
2624 фото
Записей в дневнике: 905
Репутация: 126141
|
Тема: [11-2023] Проектирование рабочего места и технологии работы машиниста-оператора электропоездов, следующих в автоматическом режимеПроектирование рабочего места и технологии работы машиниста-оператора электропоездов, следующих в автоматическом режиме С.А. ДМИТРИЕВ, начальник отдела промышленного дизайна и прототипирования, А.В. СОРОКИН, ведущий конструктор, К.А. СУСЛОВ, заместитель начальника отдела микропроцессорных систем и вычислительной техники, Проектно-конструкторское бюро локомотивного хозяйства — филиал ОАО «РЖД» Мировые тренды в области подвижного состава сегодня задают вектор развития, ориентированный на автоматическое управление движением локомотивов и моторвагонного подвижного состава. Все силы конструкторов и инженеров ведущих производителей подвижного состава, отраслевых научных институтов и конструкторских бюро сосредоточены на реализации беспилотного движения, которое в контексте железной дороги вернее было бы называть движением без машиниста. Задача создания локомотива или электропоезда, способного самостоятельно управлять тягой, торможением, работой дверей и без помощи человека выходить из аварийных ситуаций, весьма нетривиальна. Кроме того, такая задача осложняется отсутствием достаточного количества наработок и исследований, что не дает инженерам и конструкторам составить исчерпывающую картину конструктивного устройства и технологии эксплуатации автоматизированного тягового подвижного состава. В связи с этим, достижение конечной цели проводится последовательным прохождением ряда промежуточных этапов, называемых также уровнями автоматизации (УА), в международной практике — Grades of Automation (GoA). В Российской Федерации, а также международной ассоциации общественного транспорта выделяет пять уровней автоматизации (см. таблицу), как этапов достижения полностью автоматического движения. 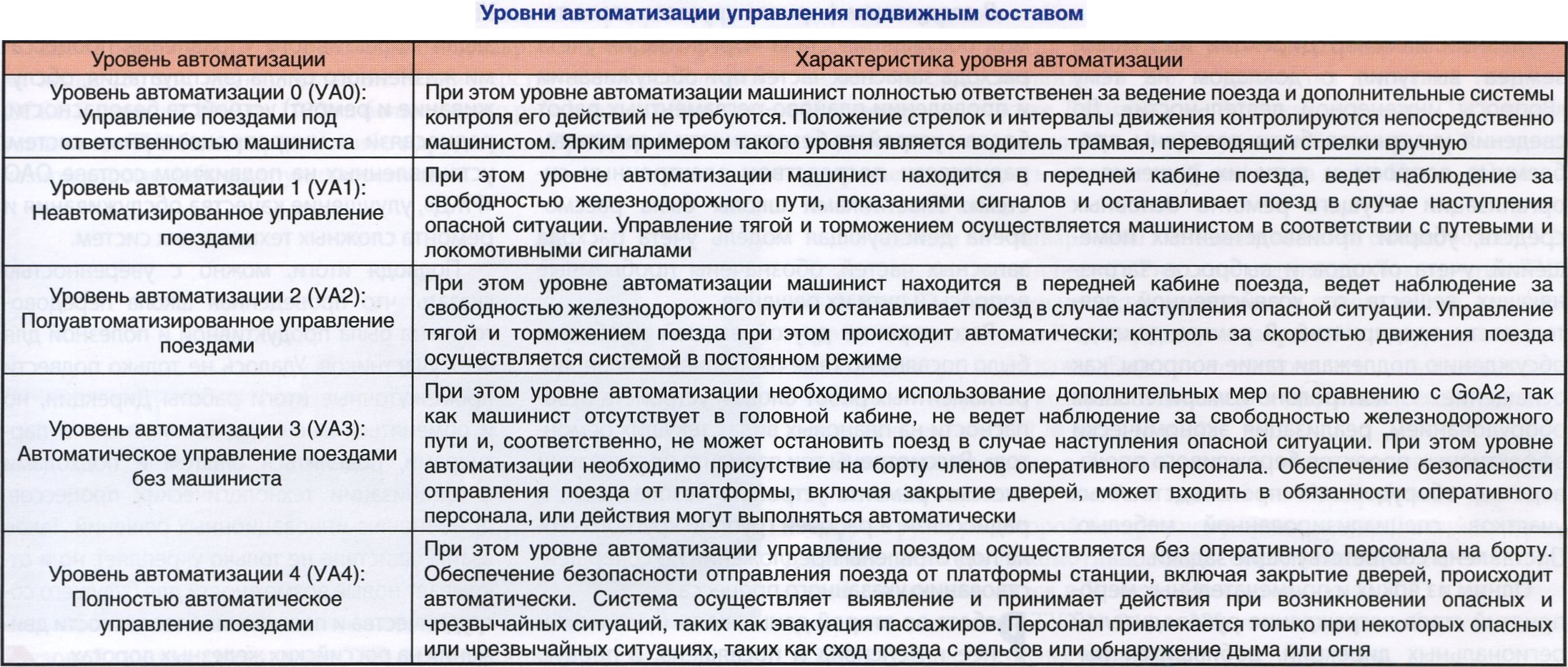 Одновременно с этим, учитывая всеобъемлющую сложность задачи полностью автоматизировать управление подвижным составом, специалистами отечественных отраслевых институтов принято решение ввести еще один промежуточный этап — уровень автоматизации 3/4 (УАЗ/4) «Автоматическое управление поездами на ос нове диспетчерского контроля и управления». Данный уровень автоматизации представляет собой промежуточный между УАЗ и УА4 вариант автоматизации. При данном уровне автоматизации машинист отсутствует в головной кабине, не ведет наблюдение за незанятостью железнодорожного пути и, соответственно, не может остановить поезд в случае наступления опасной ситуации. При таком уровне автоматизации необходимо присутствие на борту членов оперативного персонала. Обеспечение безопасности отправления поезда от платформы станции, включая закрытие дверей, входит в обязанности этого персонала. Выполнение функций по выявлению чрезвычайных ситуаций и действиям при их возникновении осуществляет система диспетчерского контроля и управления. При некоторых опасных или чрезвычайных ситуаций, таких как сход поезда с рельсов или обнаружение дыма или огня, предусматривается оперативное привлечение персонала. Именно такой вариант сегодня реализуется на Московском центральном кольце (МЦК) для электропоездов ЭС2Г «Ласточка». На двух электропоездах установлено оборудование для позиционирования положения электропоезда на инфраструктуре, связи с диспетчерским центром и обнаружения препятствий на пути. В беспилотном режиме электропоезд способен следовать по энергооптимальному графику, а при обнаружении препятствий — автоматически отрабатывать алгоритмы торможения и остановки. 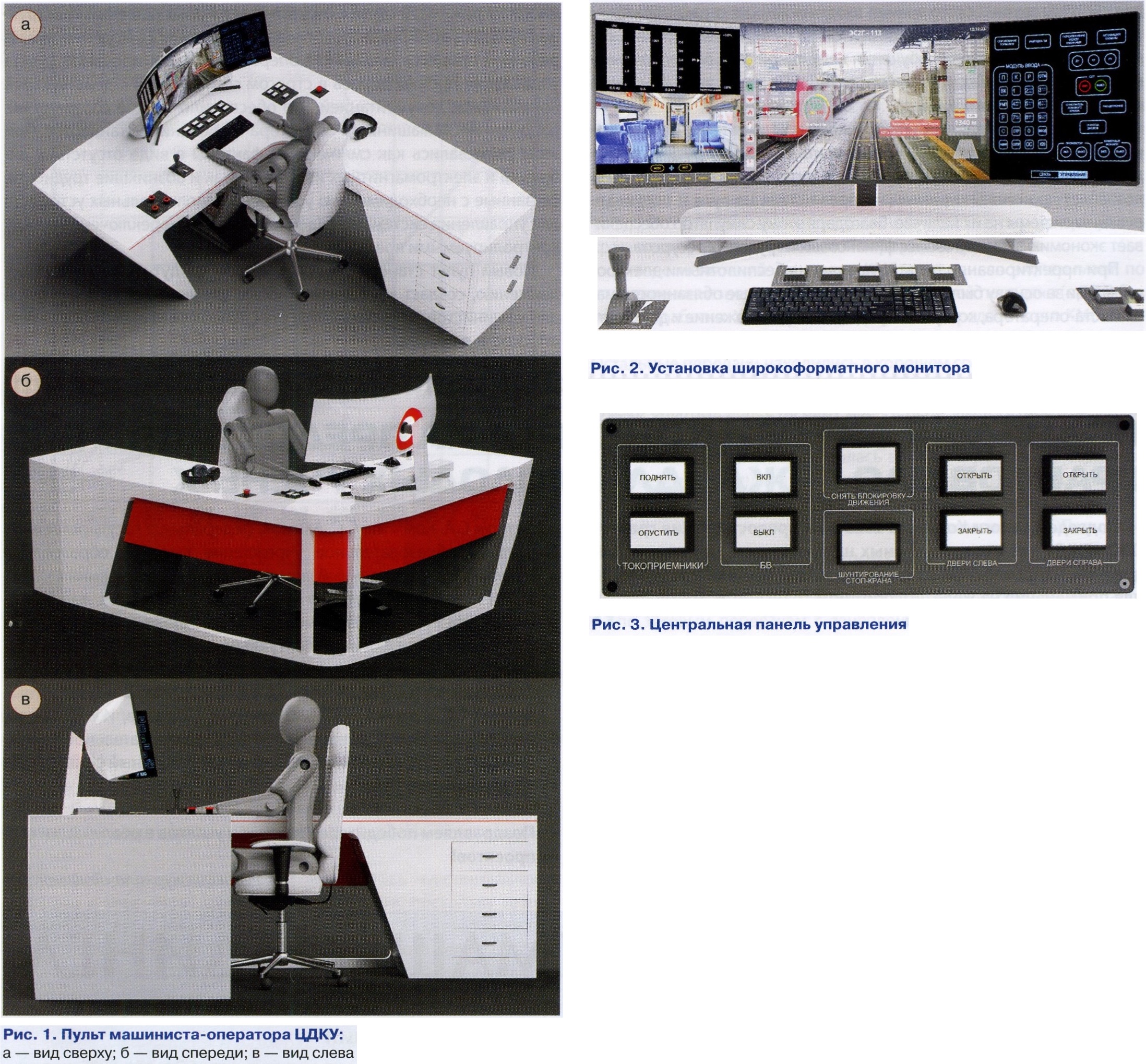 Движение электропоездов по замкнутому кольцевому маршруту дает возможность организации на маршруте центра дистанционного контроля и управления (ЦДКУ). Функциями такого центра будут мониторинг работы электропоездов в автоматическом режиме на кольце и реализация дистанционного ручного управления электропоездами при возникновении нештатной ситуации. Указанные обязанности возлагаются на машинистов-операторов, которые теперь располагаются не в кабинах электропоездов, а в центре диспетчерского контроля и управления, лишенном воздействия таких вредных факторов, как вибрация и электромагнитное излучение оборудования подвижного состава. Для реализации на железнодорожном транспорте Российской Федерации «беспилотного» движения Проектно-конструкторское бюро локомотивного хозяйства (ПКБ ЦТ) совместно с АО «НИИАС» осуществляет разработку и внедрение такой технологии движения электропоездов на Московском центральном кольце. В ПКБ ЦТ разработано дистанционное рабочее место машиниста-оператора. В основу проекта положен опыт разработки первого опытного образца АО «НИИАС» и наработки ПКБ ЦТ в области эргономики и проектирования тренажерных комплексов. На данном этапе изготовлено три опытных образца, самый актуальный из них представлен на рис. 1. В настоящий момент на нем специалистами ПКБ ЦТ отрабатывается технология дистанционного управления подвижным составом, технологии автоматического движения электропоездов, а также алгоритм действий машиниста-оператора в нестандартных ситуациях. Исходя из функций машиниста-оператора, для него предусмотрены две рабочие операции — контроль движения электропоездов в автоматическом режиме и дистанционное управление электропоездом в ручном режиме в случае необходимости. Обозначенные операции определяют функционал и компоновку рабочего места машиниста-оператора. Для выполнения мониторинга машинисту-оператору важно увеличить поле зрения, в связи с чем передача изображения с камер электропоездов осуществляется на широкоформатный монитор 49" с соотношением сторон 32:9 (рис. 2). При этом в зоне досягаемости рук должны находиться оперативные органы управления электропоездом в ручном режиме. При возникновении нестандартных ситуаций машинист-оператор переводит один из контролируемых электропоездов в режим ручного управления. При этом остальные контролируемые электропоезда переходят под контроль других машинистов-операторов. Так же при разработке было важно учесть идентичность расположения органов управления на действующем электропоезде и дистанционном пульте управления. При этом ряд органов управления, таких как управление климатической системой кабины и ее освещением, при исключении машиниста из кабины теряют свою актуальность. В связи с чем при разработке пульта машиниста-оператора дополнительно проводятся работы по пересмотру функциональности существующих на электропоезде органов управления. Второй немаловажной особенностью, которую учли специалисты ПКБ ЦТ при разработке пульта управления, является возможность оперативного переключения между управляемыми в ручном режиме электропоездами. Подобные переключения могут сопровождаться ситуациями, в которых органы управления, имеющие фиксированные положения, на разных электропоездах будут находиться в различных положениях. Тогда, установив на одном электропоезде переключатель в необходимое положение, после переключения на другой электропоезд машинист-оператор обнаружит логическую ошибку: положение переключателя на дистанционном пульте управления и действующем пульте управления на электропоезде не совпадут, и корректная работа такого переключателя будет невозможна. В связи с этим на дистанционном пульте управления могут использоваться только органы управления, не имеющие фиксированных положений (рис. 3). Поездная радиосвязь объединена с системой связи «пассажир-машинист» в соответствии с приоритетностью и возможностью переключения между каналами. Удобство пользования обеспечивается использованием машинистом-оператором беспроводными наушниками с микрофоном, расположенными на пульте управления. В рамках этого же проекта, для отладки системы технического зрения разработан и используется симулятор, включающий в себя высокоточную математическую модель подвижного состава и виртуальный мир с максимально реалистичной железнодорожной инфраструктурой. Назначение симулятора состоит в моделировании для системы технического зрения входных данных о расположении элементов инфраструктуры и объектов на пути. Таким образом, симулятор используется для обучения нейронной сети по распознаванию объектов и для контроля корректности работы уже обученной системы технического зрения. Проведение обучения и контроля работы системы технического зрения на симуляторе позволяет не проводить натурные поездки, а, следовательно, не занимать электропоезд и пути. Кроме того, симулятор позволяет произвольно размещать препятствия на пути и оценивать реакцию системы на их наличие. Благодаря этому симулятор обеспечивает экономию энергетических, финансовых и трудовых ресурсов. При проектировании пульта управления беспилотными электропоездами за основу были приняты функциональные обязанности машиниста-оператора, которые определяют его положение и действия, а также особенности управления несколькими составами в дистанционном режиме. В связи с отсутствием готовых решений конструкция пульта сформирована на основе вариационного моделирования рабочего процесса машиниста-оператора. Проектирование пульта управления производилось в строгом соответствии с действующей нормативной документацией, что обеспечило точное соответствие рабочего места машиниста-оператора требованиям стандартов. При этом учитывались как смягчающие факторы в виде отсутствия вибраций и электромагнитных излучений, так и возникшие трудности, связанные с необходимостью установки дополнительных устройств для управления системами видеонаблюдения, переключения между контролируемыми поездами. Новый пульт станет еще одним шагом на пути к беспилотному движению, создаст качественно новые улучшенные условия труда для машинистов-операторов при обеспечении высокого уровня безопасности движения. |
|
|
Цитировать 14 |
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| [07-2023] Надлежащее содержание рабочего места - гарантия комфортного выполнения должностных обязанностей | Admin | xx2 | 0 | 17.12.2023 07:30 |
| [02-2023] Контроль исправности тепловоза ТЭМ7А перед началом работы в режиме «АВТОМАШИНИСТ» | Admin | xx2 | 0 | 10.03.2023 05:28 |
| [11-2021] Нормативное обеспечение проекта по внедрению систем управления подвижным составом в автоматическом режиме | Admin | xx2 | 0 | 20.02.2022 05:37 |
| [Новости БЧ] В автоматическом режиме | Анонимный | Новости на сети дорог | 0 | 17.02.2015 18:04 |
| Хоть где-нибудь КУ/УПК работают в автоматическом режиме? | СмурфикСмурфиков | Энергетики | 0 | 06.11.2014 15:51 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , , , , , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|










