



|
|
|
|
#1 (ссылка) | ||
|
Crow indian







Регистрация: 21.02.2009
Возраст: 41
Сообщений: 30,455
Поблагодарил: 398 раз(а)
Поблагодарили 6046 раз(а)
Фотоальбомы:
2624 фото
Записей в дневнике: 905
Репутация: 126141
|
Тема: Высокоточная система позиционирования железнодорожного подвижного составаВысокоточная система позиционирования железнодорожного подвижного состава Иванов В.Ф. Попов П.А. Ключевые слова: железная дорога, система позиционирования подвижного состава, средства одометрии, цифровая модель пути Современные тенденции повышения эффективности и безопасности управления железнодорожным подвижным составом (ПС), особенно беспилотного, в значительной степени опираются на данные о точном позиционировании ПС, позволяющем реализовывать принцип координатного управления. При этом необходимо отметить, что под термином «позиционирование», понимается не только определение координат, но и совокупности других параметров. Во-первых, дополнительных параметров, описывающих кинематическое состояние ПС, таких как скорость, ускорение, ориентация, направление движения. То есть, в общем случае вектор кинематического состояния ПС содержит проекции координат в выбранной системе отсчета и ориентации, а также их пространственно-временные производные на фиксированный момент времени. Во-вторых, в процессе решения задачи позиционирования определяются информационные составляющие, такие как: номер пути/путевой секции или рельсовой цепи, ближайшие объекты железнодорожного пути и инфраструктуры (стрелочные переводы, изостыки, счетчики осей, генераторы и приемники тональных рельсовых цепей, светофоры, знаки, границы платформ/станций и т.д.), а также расстояния до них. На текущий момент нет документальных критериев, которые определяют пороговые значения погрешностей позиционирования, позволяющих относить систему позиционирования к точной или высокоточной. Поэтому использование такой характеристики как «точ-ная/высокоточная» носит достаточно условный характер и связано со следующими аспектами. С одной стороны - это сопоставление системы позиционирования ПС с глобальными навигационными спутниковыми системами (ГНСС), для которых характерна градация точности позиционирования в зависисмоти от режима функционирования. Стандартную точность связывают с режимом автономных навигационных определений с использованием сигналов (как правило стандартной точности) только спутников ГНСС, обеспечивающих метровую точность позиционирования (среднеквадратическую погрешность - СКП). Высокоточное позиционирование с сантиметровой и миллиметровой точностью обеспечивается относительным статическим и кинематическим режимами. Промежуточными точностными характеристиками, на уровне примерно 0.5-1 м (СКП) обладают локальный кодовый и широкозонный спутниковый (SBAS) дифференциальные режимы. С другой стороны - это необходимость подчеркнуть, что в рамках стандартной точности автономного режима позиционирования с помощью ГНСС невозможно обеспечить решение прикладных задач (выполнение условий, требований):
Учитывая необходимость обеспечения практически гарантированной доступности решения задачи позиционирования независимо от условий ее функционирования, можно утверждать, что высокоточная система позиционирования, удовлетворяющая указанным требованиям должна представлять собой интегрированную систему, комплексирующую данные от различных навигационных сенсоров (датчиков). В большей степени состав навигационных датчиков, применяемый для решения задачи высокоточного позиционирования ПС является традиционным - это навигационная аппаратура потребителей (НАП) глобальных навигационных спутниковых систем (ГНСС), датчик пути и скорости (ДПС), инерциальные навигационные модули/системы (ИНС), генераторы САУТ и генераторы рельсовый цепей. Но необходимо отметить, что в беспилотном ПС имеется возможность реализации дополнительных навигационных датчиков, в зависимости от состава сенсоров технического зрения-это могут быть визуальный, лидарный, радиолокационный одометры, принцип функционирования которых основан на алгоритмах SLAM (simultaneous localization and mapping). Кроме того, неотъемлемым элементом современной высокоточной системы позиционирования является цифровая модель пути, содержащая геопространственные данные о путевом развитии и путевой инфраструктуре. Каждый тип навигационного датчика обладает достоинствами и недостатками, которые учитываются при комплексировании в интегрированной системе. Отметим ряд основных, существенных особенностей навигационных датчиков.
Навигационная аппаратура ГНСССовременные ГНСС и их функциональные дополнения, открытые и коммерческие сервисы, обеспечивают практически весь спектр решаемых задач в железнодорожной отрасли, где требуется определение координатной информации, скорости и ориентации. Это связано в первую очередь с распространением высокоточных режимов (рис.1) - дифференциального (локального, регионального, широкозонного), относительного, особенно кинематики реального времени (Real-time kinematic - RTK), высокоточного абсолютного определения (Precise Point Positioning - PPP). Для обеспечения высокоточного позиционирования и ориентации ПС наиболее перспективным и в настоящее время активно внедряемым является RTK. Это обусловлено тем, что технология RTK является хорошо апробированной и практически отлаженной, наличием стандартов обеспечивающих рекомендациями по реализации этого режима, доступной стоимостью НАП с RTK. Последнее обстоятельство существенно расширило сферу практического использования этого режима, которая ранее ограничивалась топогеодезическим обеспечением и экспериментальными работами позиционирования транспортных средств.  Достоинствами, обеспечиваемыми ГНСС являются:
Инерциальные навигационные системы, измеряющие линейные ускорения и угловые скорости относительно трех ортогональных осей обладают такими достоинствами как:
Колесные датчики пути и скорости (колесная одометрия)В колесной одометрии источником данных пути и скорости может выступать как непосредственно датчик угла поворота, так и реализуемые на его основе скоростемеры и одометры. Достоинством этих устройств является автономность и помехоустойчивость. Они выдают данные о линейной скорости и пройденном пути, при этом погрешность счисления пути может достаточно быстро нарастать. Поэтому его применение как полностью самостоятельного источника данных для использования в системе высокоточного позиционирования ПС невозможно. Непосредственное использование данных от датчика угла поворота, кроме того, связано с необходимостью дополнительного контроля влияния на показания измерений юза и боксования, точного знания диаметра бандажа, а таже учета прохождения ПС в кривых. Визуальная, лидарная, радиолокационная одометрия Основным элементом беспилотного ПС является система технического зрения, в состав сенсоров которой входят видеокамеры видимого и инфракрасного диапазонов, лидары и радиолокационные датчики. Поэтому при наличии вычислительного ресурса возможна реализация SLAM алгоритмов для определения параметров движения - изменения положения и ориентации. Соответственно, одоме-трия основанная на обработке последовательности данных таких сенсоров схожа с инерциальными системами, как по составу выходных данных, так и накапливающейся погрешности, связанной с принципом функционирования. Основным достоинством одометрии рассматриваемого типа является высокая точность измерения изменений параметров ориентации и положения (малая величина случайной погрешности), что делает его весьма привлекательным для использования, как альтернативу БИНС. Однако, имеются и недостатки, которые во многом связаны с работой в открытом (окружающем) пространстве:
 Позиционирование по реперным объектам Определение абсолютных координат ПС возможно относительно известного положения реперных объектов железнодорожной инфраструктуры, таких как опоры контактной сети, осветительные мачты, светофоры (рис. 3). Для этого необходимо по данным лидара, радиолокатора или стереокамеры решить задачу обнаружения и сопровождении таких объектов с измерением до них дальности (рис. 4). Далее, в соответствие с дальномерным методом, по избыточным измерениям, решается классическая обратная задача по вычислению координат методом наименьших квадратов или с помощью фильтра Калмана. 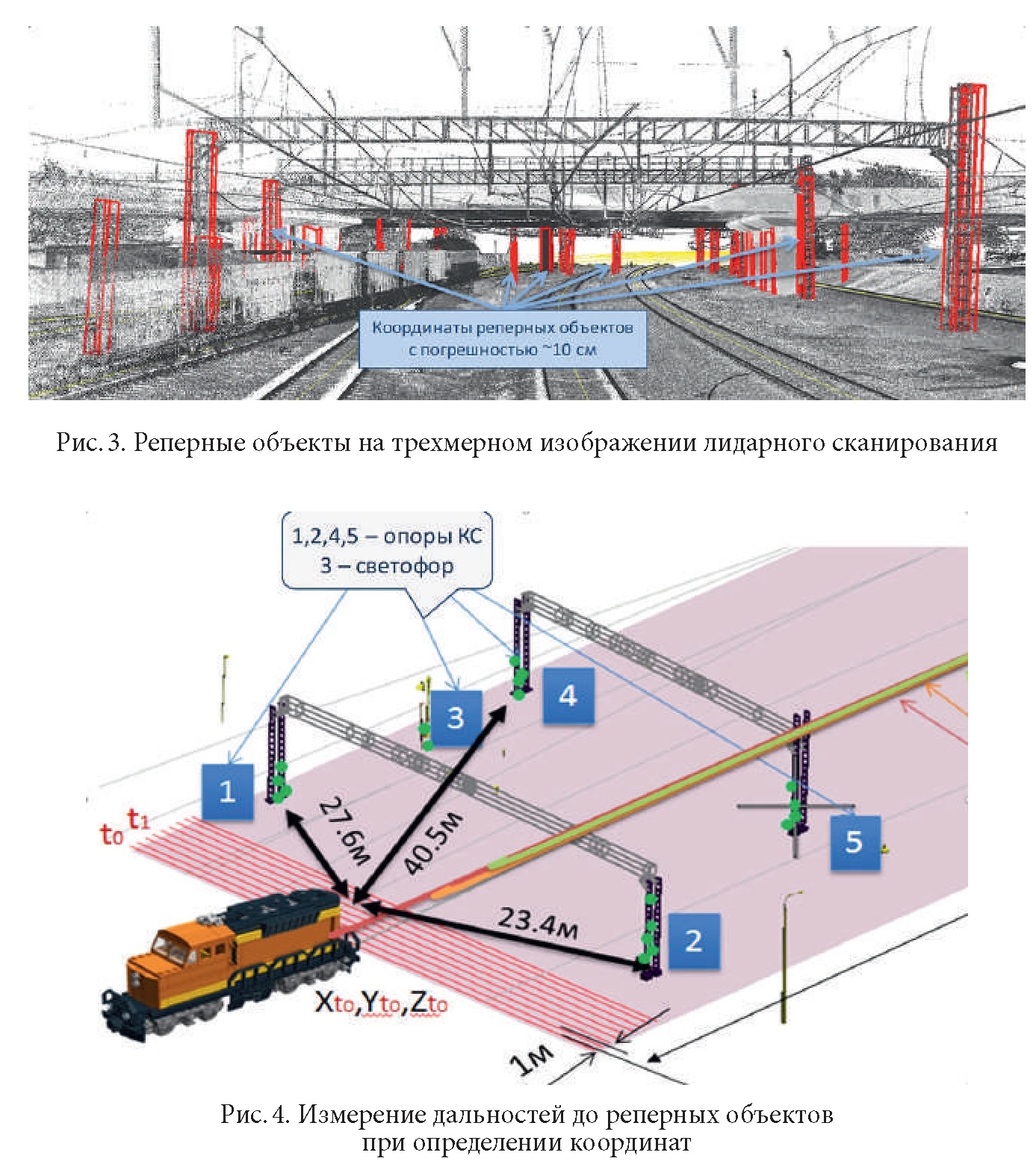 Недостатками является:
Цифровая модель путиПрименение ЦМП (рисунок 5) в составе системы высокоточного позиционирования имеет несколько аспектов. Во-первых, ЦМП является источником априорной информации о точном путевом развитии, которое описывает конечное множество траекторий движений ПС и соответственно должна использоваться для получения результирующих оценок координат и ориентации ПС по результатам наблюдения навигационных данных навигационных датчиков. Это обеспечивает повышение точности результатов оценивания и устойчивость по отношению к погрешностям и пропускам входных данных. Непосредственное использование априорной информации возможно на уровне: 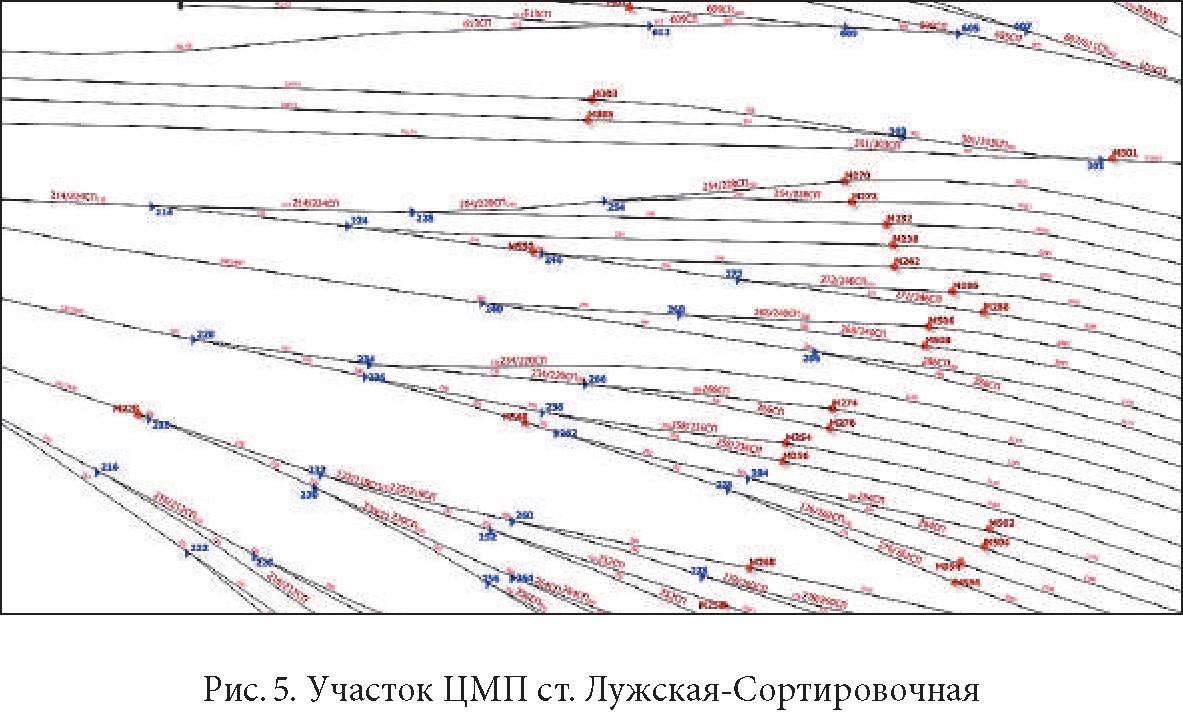 • комплексирования данных о направлении движения и ориентации оси пути в фильтре интегрированной системы; • ограничения оценки координат ПС в соответствии с координатами оси пути (т.е. привязка координат к оси пути - англ. Map matching, рис. 6), что в дальнейшем позволяет оценивать точность позиционирования и снизить скорость накопления погрешностей БИНС в отсутствии данных ГНСС; • управления функционированием фильтра в части используемой модели траектории движения. Во-вторых, ЦМП позволяет формировать информацию о номере пути, линейных координатах, прохождении по стрелкам, расстояний до светофоров, стрелок, платформ и т.д. В-третьих, является источником координатной информации объектов для решения задачи позиционирования относительно реперных объектов. Основным требованием к составлению ЦМП является достаточно высокая точность определения координат точек пути и объектов инфраструктуры, которая должна быть значительно выше, чем требуемая точность системы позиционирования в целом. 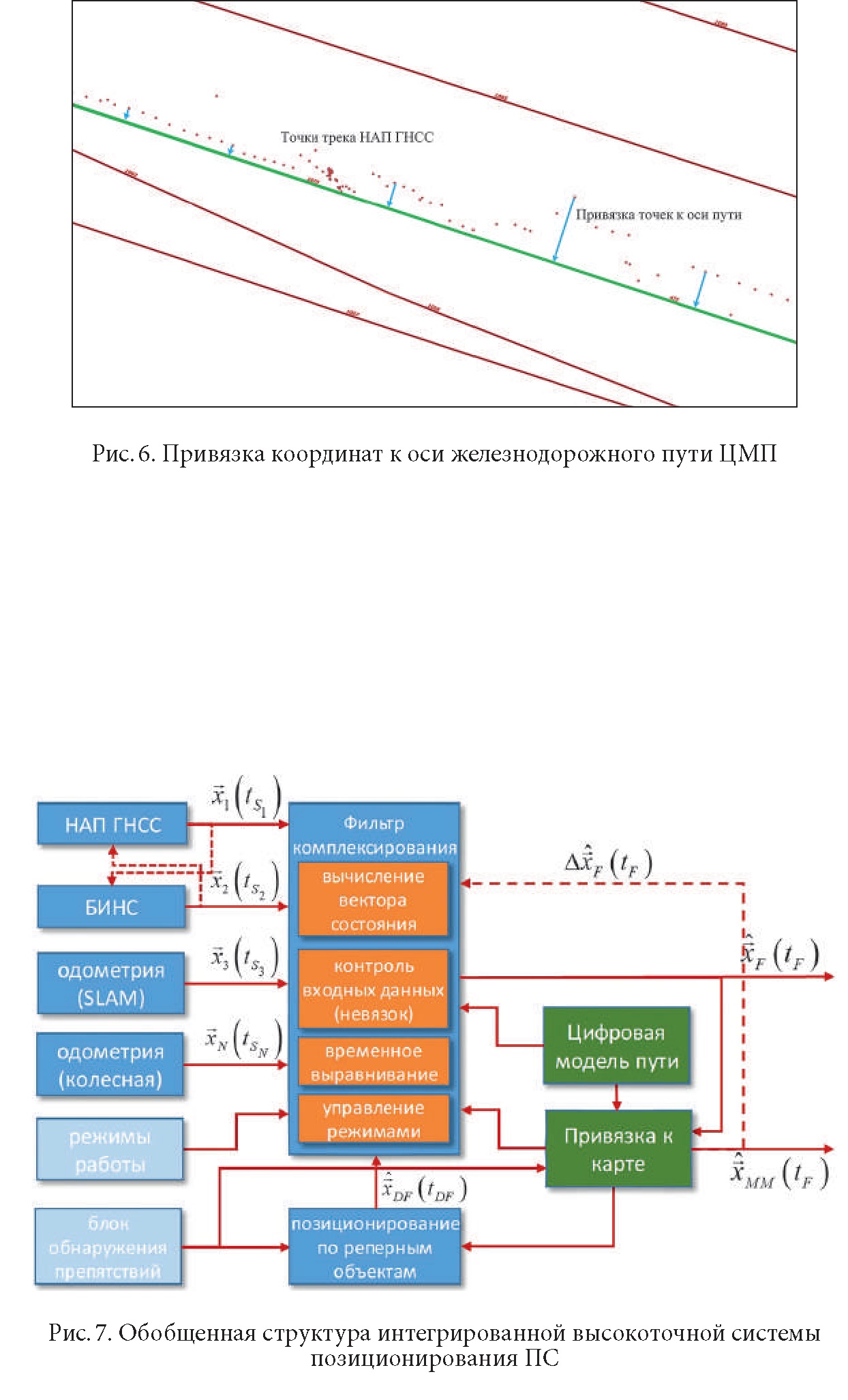 Принципы построения интегрированной системыОбобщенная структура интегрированной высокоточной системы позиционирования ПС (бортовой части, без базовых станций ГНСС) приведена на рисунке 7. Основными особенностями, которые возникают при разработке интегрированной системы с учетом характеристик датчиков, используемых в ПС являются:
ВыводыВ статье кратко рассмотрены основные особенности интегрированной высокоточной системы позиционирования подвижного состава, в которую наряду с традиционными навигационными датчиками могут входить средства визуальной, лидарной и радиолокационной одометрии, принцип функционирования которых основан на использовании алгоритмов SLAM. Также отмечается, что неотъемлемой частью высокоточной системы позиционирования является ЦМП. |
||
|
|
Цитировать 14 |
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| [03-2023] Автоматизация позиционирования подвижного состава в системах закрепления на железнодорожных станциях | Admin | xx3 | 0 | 15.12.2023 05:49 |
| [11-2022] Высокоточные цифровые карты и комплексы позиционирования | Admin | xx3 | 0 | 24.12.2022 07:50 |
| =Распоряжение= № 25р от 11 января 2013 г. - Об утверждении стандарта ОАО "РЖД" Система неразрушающего контроля в ОАО "РЖД". Детали колесных пар локомотивов, МВПС и специального железнодорожного подвижного состава | Admin | 2013 год | 1 | 24.01.2013 23:34 |
| ПР 32.163-2000 Система испытаний подвижного состава. Организация и порядок проведения эксплуатационного пробега тягового подвижного состава на этапе предварительных испытаний | Admin | ОСТы | 0 | 04.05.2011 17:40 |
| ОСТ 32.53-96 Система испытаний подвижного состава. Организация и порядок проведения приемочных и сертификационных испытаний тягового подвижного состава | Admin | ОСТы | 0 | 03.05.2011 14:33 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|










