



|
|
|
|
#1 (ссылка) |
|
Crow indian







Регистрация: 21.02.2009
Возраст: 41
Сообщений: 30,426
Поблагодарил: 398 раз(а)
Поблагодарили 6046 раз(а)
Фотоальбомы:
2624 фото
Записей в дневнике: 904
Репутация: 126141
|
Тема: [11-2022] Высокоточные цифровые карты и комплексы позиционированияВысокоточные цифровые карты и комплексы позиционирования МЫЛЬНИКОВ Павел Дмитриевич, СПБФ АО «Научно-исследовательский и проектно-конструкторский институт информатизации, автоматизации и связи на железнодорожном транспорте», Санкт-Петербургский филиал, первый заместитель директора, Санкт-Петербург, Россия Ключевые слова: высокоточная электронная карта, система позиционирования, геоинформационная технология, система автоматического управления локомотивом, автономные железнодорожные транспортные системы Аннотация. Развитие геоинформационных технологий выводит на новый уровень работу бортовых систем тягового подвижного состава за счет комплексной обработки информации навигационных датчиков и применения высокоточной электронной карты. В статье представлены решения, которые успешно используются для высокоточной работы системы автоведения в пассажирском движении и для автоматического движения подвижного состава без участия машиниста. Географические информационные системы (ГИС) на железнодорожном транспорте решают задачи поиска оптимального маршрута и отслеживания движения по нему. Однако точность этих карт находится в метровом диапазоне, тогда как для беспилотного подвижного состава требуется точность в пределах 25 см. Для реализации проектов по беспилотному движению применяются высокоточные цифровые карты (High Definition (HD) maps) с точным местоположением объектов в векторном формате. Карты содержат детальную информацию обо всех объектах инфраструктуры, попадающих в зону видимости транспортного средства. Предпосылкой создания высокоточных электронных карт для железнодорожного подвижного состава послужили два инновационных проекта АО «НИИАС» по созданию беспилотного тягового подвижного состава: маневровый локомотив на станции Лужская Октябрьской дороги [1 ] и электропоезд «Ласточка» на Московском центральном кольце [2]. Одна из составных частей бортовой системы обнаружения препятствия - высокоточная система позиционирования, которая определяет местоположение подвижного состава с точностью до 25 см. В ее основе комплексное программно-аппаратное решение, производящее одновременную обработку данных большого количества информационных сигналов от различных навигационных датчиков. Бортовая часть высокоточной системы позиционирования состоит из нескольких компонентов. Навигационный приемник предназначен для определения текущих координат, высоты, скорости и времени по сигналам спутниковых навигационных систем ГЛОНАСС и др. 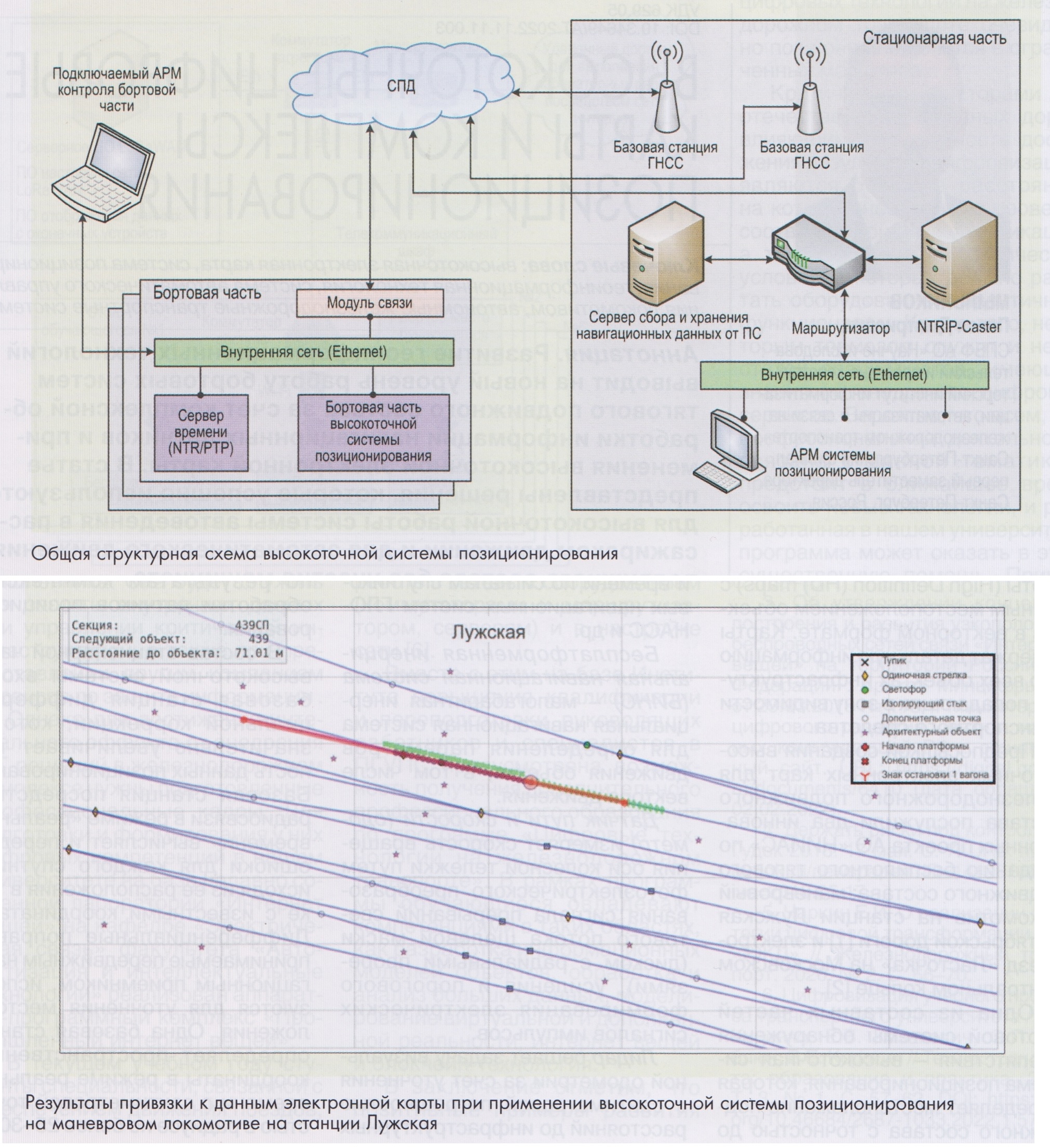 Бесплатформенная инерциальная навигационная система (БИНС) - малогабаритная инерциальная навигационная система для определения параметров движения объекта, в том числе вектора движения. Датчик пути и скорости (одометр) измеряет скорость вращения оси колесной тележки путем фотоэлектрического преобразования сигнала прерываний светового потока щелевой маски (диском с радиальными прорезями), усиления и порогового формирования электрических сигналов импульсов. Лидар решает задачу визуальной одометрии за счет уточнения с сантиметровой погрешностью расстояний до инфраструктурных объектов, хранимых в высокоточной цифровой электронной карте. Получение данных визуальной одометрии и других навигационных источников необходимо для компенсации погрешности измерений в неблагоприятных условиях (проскальзывание колесной пары, погрешность измерений бандажа колеса и др.). Высокоточная цифровая электронная карта обеспечивает привязку ТПС к путевому развитию по результатам комплексной обработки датчиков позиционирования. В состав стационарной части высокоточной системы входит базовая станция дифференциальной коррекции, которая значительно увеличивает точность данных позиционирования. Базовая станция посредством радиосвязи в режиме «реального времени» вычисляет и передает ошибки для каждого спутника, исходя из ее расположения в точке с известными координатами. Дифференциальные поправки, принимаемые передвижным навигационным приемником, используются для уточнения местоположения. Одна базовая станция определяет пространственные координаты в режиме реального времени с сантиметровой точностью в радиусе не более 25-30 км. При удалении навигационного приемника от базовой станции на расстояние более 100 км точность позиционирования ухудшается пропорционально расстоянию. При решении задачи комплексной обработки информации от навигационных датчиков требуется жесткая синхронизация времени всех источников данных. Для этих целей высокоточная система позиционирования использует время спутниковых навигационных систем, которое также служит источ ником времени для синхронизации всех компонентов, входящих в комплекс. Как уже было отмечено ранее, основная задача комплекса заключается в определении точного местоположения подвижного состава при реализации автоматического управления. Так, для пригородного пассажирского движения необходимо обеспечить точность остановки подвижного состава на платформе с максимальным отклонением ±25 см от знака «Остановка первого вагона». Учитывая неоднородность железнодорожной инфраструктуры (наличие навесов, тоннелей, зданий и др.), такую точность можно достичь за счет применения высокоточной электронной карты.  Для создания высокоточной электронной карты применяются современные геодезические приборы, которые с миллиметровой точностью фиксируют расположение объектов инфраструктуры: светофоры, изостыки, генераторы и приемники тональных рельсовых цепей, стрелочные переводы и др. Обработанная информация сохраняется в цифровой базе данных в виде многослойных графов связанных объектов [3]. При этом алгоритмическая обработка информации от навигационных датчиков и выполнение привязки к данным электронной карты обеспечивают высокую точность позиционирования даже в сложных условиях работы навигационного оборудования. Ключевое преимущество применения высокоточных систем позиционирования заключается в возможности улучшения условий труда машинистов и уменьшении влияния «человеческого фактора» при обеспечении безопасности движения. Например, система достоверно определяет номер пути следования поезда и исключает ручной ввод машинистом номера пути на всех участках эксплуатации подвижного состава. Одним из вызовов при массовом внедрении высокоточных систем позиционирования становится потребность в создании и поддержании в актуальном состоянии электронных карт. Проблемы с актуализацией карт могут привести к затруднению выполнения заложенных в системе функций при существенных изменениях в инфраструктуре. Помимо этого, текущие подходы по созданию высокоточных электронных карт с применением геодезической съемки крайне трудозатратны и дорогостоящи. Для автоматизации процесса создания высокоточных электронных карт разрабатывается мобильный комплекс съема пространственных данных. При этом учитываются результаты, полученные при реализации проекта высокоточной системы позиционирования, а также большая база знаний и опыт института в сфере использования пространственных данных и координатных методов управления. Создается высокоточная цифровая модель на базе существующих централизованных геоинформационных систем, в которых хранится информация об объектах инфраструктуры и путевого развития (без предъявления требований по высокой точности расположения объектов), за счет уточнения этих данных с применением мобильного комплекса съема пространственных данных и данных аэрофотосъемки. Создание мобильного комплекса съема пространственных данных даст возможность поддерживать в актуальном состоянии цифровую модель пути, которая служит основой высокоточной цифровой карты. Эта информация может быть использована как во вновь разрабатываемых системах на базе BIM-технологий, так и для автоматизированной актуализации существующих баз геоинформационных систем ОАО «РЖД». В заключение следует отметить, что системы высокоточного позиционирования становятся ключевым инструментом в решении задач повышения безопасности движения и могут быть использованы в сфере интервального регулирования движения поездов. Кроме этого, применение высокоточной системы позиционирования для систем автоведения пассажирского подвижного состава позволяет производить достоверную остановку поезда у знака «Остановка первого вагона» без дополнительных затрат на обновление инфраструктурных объектов. СПИСОК источников 1. Охотников А.Л., Попов П.А. Беспилотное управление локомотивом: вчера, сегодня и завтра // Автоматика, связь, информатика. 2019. № 8. С. 12-17. DOI: 10.34649/ АТ.2019.8.8.002. 2. Попов П.А. Применение передовых технологий для работы в автоматическом режиме на МЦК // Железнодорожный транспорт. 2020. № 11. С. 17-21. 3. Якушев Д.А. Цифровая модель пути для беспилотного управления движением поездов // Автоматика, связь, информатика. 2021. № 4. С. 35-39. DOI: 10.34649/АТ.2021.4.4.005. |
|
|
Цитировать 14 |
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| Цифровые метки | horon | Локомотивные устройства безопасности | 12 | 13.05.2019 13:42 |
| [02-2018] Цифровые технологии для бортового оборудования | Admin | xx2 | 0 | 30.03.2019 07:38 |
| маршрутные карты карты эскизов и технологические инструкции по ТНВД от дизеля Д49 | max300191 | Машинисту тепловоза | 0 | 18.04.2014 01:33 |
| Создание и эксплуатация высокоточной координатной системы ОАО «РЖД». Временный регламент | Admin | Документация | 0 | 20.02.2013 12:14 |
| Цифровые реле эл.сетей жд | jogladik | Микропроцессорные системы | 0 | 02.06.2010 14:28 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , , , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|










