



|
|
|
|
#1 (ссылка) |
|
Crow indian







Регистрация: 21.02.2009
Возраст: 41
Сообщений: 30,426
Поблагодарил: 398 раз(а)
Поблагодарили 6046 раз(а)
Фотоальбомы:
2624 фото
Записей в дневнике: 904
Репутация: 126141
|
Тема: Где зарыты резервы метрополитенаГде зарыты резервы метрополитена Настенко И.К., Настенко К.И., электродепо "Дарница", Киевский метрополитен Отечественный метрополитен эксплуатирует подвижной состав, вагоны которого проектировались еще в 60-х годах прошлого века. Срок эксплуатации у многих из них давно истек, но... был продлен экспертами. А проблемы эксплуатации такого подвижного состава остались - нарастающий механический износ и высокое потребление электроэнергии на тягу. У поезда метро три режима движения: разгон, выбег, торможение. Энергия потребляется только в динамических режимах и чтобы минимизировать ее потребление при неизменном полном времени движения по линии необходимо с большой точностью рассчитывать динамические режимы привода и поезда. Энергия, потребляемая поездом на тягу, равна сумме потенциальной энергии, кинетической и энергии потерь, причем основная составляющая - кинетическая. Масса пассажиров при 200 человеках в вагоне составляет чуть менее 1/3 полной массы вагона. Кажущийся очевидным путь снижения потребления электроэнергии за счет уменьшения массы вагона не дает желаемого результата. Снижается его сцепление с рельсом и необходимо уменьшить ускорение разгона и замедление торможения. При этом чтобы сохранить время движения, необходимо увеличивать скорость разгона. Получается, что уменьшая массу, входящую в первой степени в уравнение энергии, следует увеличивать скорость, входящую в квадрате в то же уравнение. Отсюда следует, что уменьшение пиков скорости при неизменном времени движения - стратегическое направление снижения потребления энергии. О том, как этого добиться, какие требования предъявляются к тяговому приводу, какие его параметры необходимо знать, и как и с помощью каких технических средств их определить, пойдет речь далее. Каждый вагон метрополитена имеет 4 двигателя постоянного тока последовательного возбуждения (на каждую ось по двигателю). Управление приводом - реостатное, с ослаблением возбуждения, схема включения двигателей - последовательно-параллельная. Сначала все двигатели и все пусковые сопротивления включены последовательно (схема ПС), затем по мере разгона, когда выведены все сопротивления, двигатели переключаются на две параллельных группы - последовательно-параллельная схема (схема ПП). В каждую группу включены пусковые сопротивления, которые ступенчато выводятся. Такая схема управления приводом обеспечивает его высокую динамику, на грани устойчивого сцепления колеса с рельсом, что ведет к снижению скоростей разгона и, соответственно, уменьшению потребления энергии. Заканчивается разгон привода ослаблением магнитного потока в двигателях путем шунтирования обмотки возбуждения индуктивным шунтом и сопротивлением в четыре ступени. Это и обеспечивает большой динамический момент на высоких скоростях. Ни один вид рельсового транспорта не разгоняется с таким ускорением и не тормозится с таким замедлением, как поезд метро. Это достигается большим количеством двигателей и сложной схемой управления ими.  Схема привода - релейно-контакторная, громоздкая, одних автоматических выключателей только 57 шт. А еще два тиристорных регулятора напряжений для питания обмоток возбуждения в тормозных режимах, несколько десятков контакторов и реле, два двигателя постоянного тока для вращения реостатных контроллеров (РК), которые весят по четверти тонны, несколько ящиков пусковых резисторов, два индуктивных шунта в цепи ослабления поля весом по 120 кг и т.п. Из штатных средств измерения имеется один датчик тока, один вольтметр и по датчику скорости в головных вагонах. Автоматика распределена по всему вагону. Основная часть находится в подвагонном пространстве в ящиках, защищающих аппаратуру от пыли и влаги, часть - в кабине машиниста. Разместить для исследований дополнительные сенсоры, контрольные кабели, источники питания и многое другое весьма проблематично. Поэтому создание комплекса, монтируемого и демонтируемого в вагоне метро за сравнительно короткое время (2..3 часа), становится "очень интересной" задачей. Чем больше скорость разгона на перегоне, тем больше энергии было потреблено, но тем меньше, как правило, время движения по этому перегону. Сократив время движения на одном перегоне, следует его использовать на другом, и не обязательно на соседнем. Минимизировать потребление электроэнергии тяговым электроприводом необходимо путем определения оптимальных скоростей разгона по каждому перегону так, чтобы суммарное потребление электроэнергии при прохождении поездом всей линии было бы минимальным, а время сообщения между конечными станциями было равно заданному. Так как все перегоны метро имеют разную длину, разные профили и различную загрузку, то для каждого из них определяется своя скорость разгона для разных времен суток. А в идеале нужно учитывать даже приход электричек на станциях "Вокзальная", "Выдубичи" и "Святошино", конец футбольного матча (купить футбольный мяч на который можно даже онлайн) и время окончания концерта во дворце "Украина". Попытки снизить потребление энергии, используя упрощенные математические модели, не учитывающие сложные физические процессы в энергетических установках и динамики движения объекта, приводят к обратным результатам. Вместо экономии - получаем перерасход. Многолетний опыт эксплуатации Киевского метрополитена и многократные корректировки графиков движения позволили чисто интуитивно приблизиться к оптимальным режимам движения. Дальнейшее же снижение потребления электроэнергии, а речь идет о нескольких процентах, но тысячах киловатт-часах электроэнергии в сутки по каждой линии, уже невозможно без применения максимально точных моделей тягового электропривода в переходных режимах. Линейные модели привода не пригодны, потому что скорость в метро изменяется от нуля до 80 км/ч, а диапазон изменения тока 3..4-х кратный. При последовательном возбуждении тяговых двигателей у двигателя практически нет постоянных параметров. Магнитная цепь двигателя для каждого значения скорости и тока должна пересчитываться с учетом кривой намагничивания, используя итерационные методы. Только это дает максимально точные расчеты электромагнитных и электромеханических переходных процессов в тяго- вом приводе, а еще к ним необходимо добавить такой же точности расчеты динамики поезда на каждом метре пути и максимально точное задание исходных данных. Компьютер позволяет выполнить расчеты сложной математической модели с очень высокой точностью. Но такая, можно сказать идеальная, точность расчетов на практике нереализуема. И вот почему. Пример: после положительных результатов расчетов, дающих экономию электроэнергии порядка 10 тыс. кВт/час в сутки по "Святошинско-Броварской" линии, через два года эксплуатации оказалось, что удельные показатели расхода электроэнергии - киловатт-часы деленные на тонну пассажиро-километров...возросли на 0,2 %. Сравнили статистику двух лет экономии и пришли в ужас. Было очень трудно доказать, что если хоть одна величина, вводимая как исходное данное, имеет погрешность большую или равную 0,2%, то результат не будет иметь погрешность менее 0,2%. Промышленные трансформаторы тока имеют погрешность 5%, трансформаторы напряжения имеют такую же, счетчики электроэнергии - больше 0.2, точность определения числа перевезенных пассажиров, а тем более их масса - без комментариев. Для метрополитена 0,2% электроэнергии тоже деньги, за них тоже нужно бороться, но нужно и реалии понимать. Т.е. во многих технических приложениях точность реализации самых достоверных расчетов сильно зависит от метрологии, когда исходные данные определяются экспериментальным путем. Особенно для данных, не подлежащих прямому измерению. Интересующие переходные процессы на транспорте длятся десятки секунд. В эпоху, когда переходные процессы в транспортных электромеханических системах записывались на шлейфо-вые осциллографы, а это метры пленки или бумаги, говорить о точности обработки осциллограмм не приходилось, да еще когда требовалось получить величины, определяемые из осциллограммы путем двойного графического дифференциро- ТРАНСПОРТ вания. Мозоли на глазах натирали, а точность их обработки при помощи линейки и чертежного измерителя -плюс/минус сапог. Прибегали к такому приему, что одну осциллограмму обрабатывали три человека независимо друг от друга. Особые проблемы были с определением временных интервалов для вычисления производных. Цифровая запись результатов эксперимента для электромеханики, когда многие параметры не могут быть измерены непосредственно (к.п.д. двигателя, его механическая характеристика), а вычисляются по результатам обработки нескольких косвенных величин, конечно, существенно упрощает эту задачу. Но необходимо иметь достаточно большую разрядность АЦП и частоту опроса датчиков, чтобы обеспечить требуемую точность конечного результата. В момент разгона поезда метро, РК, управляющий пуском привода, пробегает 36 позиций. Допустим, что на каждой позиции РК, в результате задания параметров привода с недостаточной точностью, получена ошибка во времени величиной 0,1 с. Тогда, за полный цикл одного пуска ошибка составит 3.6 с. На десяти перегонах ошибка по времени составит уже 36 с. Это совершенно недопустимо по нормам метрополитена. Машиниста накажут как за 36 с опережения графика, которое ведет к большому пережогу электроэнергии, так и за 36 с отставания. Подобная же ситуация с точностью расчета электроэнергии, потребляемой приводом на каждой позиции РК. Необходимо очень точно уметь рассчитывать энергию и время. Энергию только в режиме пуска, а время во всех режимах, даже на остановках. Лишнее время, отведенное на остановки, сокращает время, отведенное на движение. Значит нужно заложить большую скорость, а это - энергия. На транспорте время - энергия - деньги. При выводе ступеней пускового реостата меняются параметры привода, определяющие его электромеханические постоянные времени. Точность их задания должна быть выше, чем желаемый процент экономии электроэнергии, хотя бы на порядок. А для этого необходима аппаратура, которая позволит из эксперимента с высокой точностью определить ряд параметров привода в качестве исходных данных для дальнейших оптимизационных расчетов. Еще до создания мобильной лаборатории были разработаны методики, алгоритмы, а по ним и программы моделирования тягового привода, динамики поезда, программы составления баз данных и программы расчетов графиков движения поездов, оптимальных по минимуму потребления электроэнергии для всех линий Киевского метрополитена. Задав исходные данные, при составлении которых первоначально использовалась только конструкторская документация на вагон метро, его тяговый привод и проектная документация на профиль трассы, был получен обнадеживающий результат. Экономия электроэнергии составила порядка 5% по "Святошино-Броварской" линии и на уровне 6-7 % на "Куреневско - Красноармейской" линии. Первоначально загрузка поезда определялась на глазок. После внесения в исходные данные результатов талонного обследования распределения пассажиров по перегонам по часам в течение суток и по четверти часа в часы пик, проведенного в 1997 г, было дополнительно получено порядка 4..6 % экономии по разным линиям. Это был наглядный пример эффективности уточнения исходных данных. Снижение пиков скорости повлекло и снижение механического износа подвижного состава. Все правильно - но не задумывались, не ждали, за это вроде и не боролись. А, действительно, чем меньше скорость, тем меньше энергия взаимодействия вагона и пути. Их взаимодействие включает в себя и удары. Меньше скорость - меньше сила удара - меньше разрушение состава и пути. Это порадовало сначала механиков, а уж потом, убедившись, что это не случайность, порадовались и мы. Ну а где брать следующие проценты экономии? Возможны три направления. Первое - до бесконечности уточнять исходные данные и расчетную модель, но подобие насыщения наступит очень быстро. Второе - снизить потребление энергии на каждом, где возможно, перегоне, найти локальные экстремумы - варианты, обеспечивающие минимум энергии по конкретному перегону за заданное время движения, для каждого перегона определить допустимое множество времен, для каждого времени найти оптимальный вариант по минимуму энергии. И только после этого переходим к глобальной оптимизации. В качестве исходных данных - оптимальные варианты, а не варианты вообще, как было первоначально. Так что же это за варианты и как их искать? Ответ дает теория оптимального управления: минимум энергии обеспечивается при постоянной скорости движения. Однако тяговый электропривод вагонов метро не позволяет осуществлять движение поезда с заданной постоянной скоростью. Более того, схема привода не позволяет осуществлять и дискретное приближение к движению с постоянной скоростью. Для дискретного приближения необходимы многократные подключения и отключения тягового привода. Опыт эксплуатации показал, что довольно часто, при повторных подключениях под тягу, при скоростях больших 50 км/ч, происходило срабатывание защиты на тяговой подстанции и снятие напряжения с данного перегона. Быстро восстановить питание не удается, следуют отмены поездов, а это уже ЧП, которое не оправдывается никакой экономией. Но ведь по теории должно быть наоборот - чем выше скорость вращения двигателей, тем меньший ток потребляется из сети при их подключении. Ведь РК пробегает все 36 позиций, а все ступени пусковых сопротивлений вводятся и выводятся в той же последовательности. Правда, уже не в функции тока, а в функции времени. Предварительно предположили, что перегрузка тяговой подстанции происходит при переключении схемы с последовательного соединения всех двигателей, на последовательно-параллельное соединение. Переключение происходит по схеме моста. Двигатели и их пусковые сопротивления, предназначенные для параллельных групп, образуют плечи моста, а в нем размыкается диагональ, по которой все двигатели были соединены до этого последовательно. Предполагалось, что при уравновешенной схеме моста ток в диагонали в момент размыкания будет незначительным. Здесь можно заметить следующее расхождение между теоретическими предпосылками и практикой: ■ никогда на практике не удастся в электромеханической системе с четырьмя, даже однотипными, двигателями и переменной нагрузкой уравновесить плечи моста, чтобы ток в диагонали был близок к нулю, даже для одного значения скорости вращения двигателей. А для различных скоростей, при фиксированных значениях пусковых сопротивлений в других плечах моста - это просто из области фантастики. Диагональ моста обычно используется как особо чувствительная ветвь в особо точных измерительных схемах. А здесь она используется для бестокового переключения мощной силовой цепи; ■ после ряда модернизаций схемы привода заводом изготовителем, в нижней параллельной ветви поменяли местами двигатели с обмотками возбуждения и пусковые сопротивления. С чем-то там боролись, а мост стал принципиально неуравновешен, и диагональ перед ее размыканием создает ложную цепь. Эта цепь состоит только из пусковых сопротивлений параллельных ветвей и подключена на напряжение контактной сети. Ток в ней может достигать 350..450 А в зависимости от просадки напряжения, которая определяется скоростью повторного подключения и удаленностью от места подпитки контактного рельса. Спасает то, что при указанной мощности привода для тяговой подстанции пусковой ток состава больше полного тока одного вагона в данной ситуации. При небольшой несинхронности срабатывания приводов разных вагонов состава защита на подстанции может и не сработать, а защита на вагоне - предохранитель - не срабатывает из за кратковременности к.з. И тем не менее ток, потребляемый приводом вагона, возрастает в этот момент раза в полтора. При синхронном срабатывании приводов всех вагонов, чего добиваются для нормальных режимов работы, произойдет перегрузка тяговой подстанции и сработает защита. Расчеты, полностью моделирующие работу тягового привода в режиме разгона, показали, что только изменение величин пусковых сопротивлений на 5% от расчетных значений при переходе привода со схемы ПС на ПП создает в схеме режимы близкие к к.з. Отсюда требование к мобильной измерительной лаборатории: по результатам эксперимента, по замерам напряжений и токов, необходимо "поймать" эти 5% отклонения пусковых сопротивлений от номинальных величин и это не должна быть погрешность измерений. Повторное подключение привода происходит при скорости, отличной от той, при которой происходит переключение с ПС на ПП при обычном пуске. Следовательно, в диагонали могут возникнуть токи, значительно превышающие расчетные, и они разрываются коммутационной аппаратурой, не рассчитанной на эти токи. Зафиксировать эти явления невозможно ни в депо без нагрузки и скорости, ни в процессе эксплуатации или обкатки без использования регистрирующей аппаратуры. Разобраться во всем этом без полноценных экспериментов с записью токов и напряжений в разных точках схемы не представлялось возможным. Нужно учесть также, что в процессе многолетней эксплуатации вагонов метро было проведено множество модернизаций и капитальных ремонтов тех элементов вагона, которые непосредственно влияют на механические и энергетические показатели его тягового привода, и в первую очередь самих двигателей. Т.е. паспортные данные просто устарели. Уточнить эти величины можно только на основании осциллограмм переходных процессов в тяговом приводе и динамики поезда. Рассчитывая пуск поезда, в первую очередь нужно учесть изменение напряжения контактной сети вдоль пути по каждому перегону. В отличие от общепромышленных приводов транспортный электропривод работает не при постоянном напряжении. Его величина меняется по мере удаления поезда от тяговой подстанции и от точек подпитки. Этот параметр играет важнейшую роль и влияет на точность определения времени, пути разгона и полного времени движения поезда по перегону. Да и расчет потребления электроэнергии нужно вести с учетом реальных значений напряжения, а не по средней расчетной величине 750 В. Особенно большие просадки по напряжению происходят при одновременном разгоне двух поездов, питающихся от одной тяговой подстанции. Далее, получить сколько-нибудь точную расчетную модель двигателя последовательного возбуждения для всего диапазона изменения его скоростей и нагрузки без кривой намагничивания невозможно. Поэтому необходимо по осциллограммам токов якоря и обмотки возбуждения двигателя на каждой ступени РК уточнить кривую намагничивания тягового двигателя, электромагнитные электромеханические постоянные времени привода, а через них вычислить индуктивности якоря и обмотки возбуждения. Тяговый двигатель типа ДК -108А, установленный на вагоны типа Е и 502, имеет очень глубокие пазы якоря, а основание зубца очень узкое - всего 7 мм и при расчетных пиках тока при переходе на каждую новую пусковую позицию основание зубца сильно насыщается. Имеет место переменное насыщение двигателя. Обычно говорят "коэффициент насыщения", но какой это коэффициент, если он переменный. Это не может не отразиться на точности расчетов динамики привода. Необходимо набрать статистику разброса параметров двигателей и силовых цепей.  Требуется определить точность индикатора скорости, которым руководствуется машинист при ведении поезда. Существующий - не отвечает современным требованиям по точности, особенно на высоких скоростях, не учитывает эффект буксования колес, неизбежного при разгоне и торможении двигателем, при прохождении кривых вагоном. Ведь конечный итог расчетов - рекомендации по скоростям разгона на каждом перегоне для каждого времени суток, скоростей повторных подключений. Плюс - минус два километра в час это погрешность большая, чем проценты экономии, за которые идет борьба. Поэтому требования к указателю скорости должны быть самые высокие. Когда на смену оргмероприятия по экономии электроэнергии придут технические, то замена указателя скорости должна будет производиться в первую очередь. Далее о динамике поезда. Поезд Киевского метрополитена имеет длину 100 м, и может находиться одновременно на нескольких профилях пути (подъем, спуск, кривая). Каждый из них характеризуется своей величиной сопротивления движению. Необходимо уточнить сопротивление движению поезда от загрузки, под током, без тока, в кривых разного радиуса, в кривых типа зигзаг, влияние погодных условий на открытых участках трассы. Это нужно для более точного определения времени движения поезда. Необходимо оценить влияние напряжения аккумуляторных батарей на соблюдение временных выдержек реле в схеме управления приводом и скорость вращения двигателя привода РК, т.е. соблюдение последовательности срабатывания пускорегули-ровочной аппаратуры. На основе всего сказанного выше, сформулируем цель создания мобильной измерительной лаборатории: ■ поиск возникающих неисправностей в силовых цепях электроприводов подвижного состава; ■ детальное изучение работы схемы в переходных режимах, включая определение реальных выдержек времени срабатывания аппаратуры; ■ экспериментальное определение параметров электропривода и сопротивлений движению поезда с целью повышения точности исходных данных и используемых математических моделей. Измерения должны проводиться на любом вагоне в любом депо. Минимум времени для монтажа датчиков. Монтаж датчиков на вагоне не должен повлечь за собой изменение параметров схемы, нарушение требований пожарной и электробезопасности. Питание должно осуществляться от бортового аккумулятора с минимальным потреблением. Аппаратура должна работать на открытых участках метрополитена и в тоннеле в условиях повышенной вибрации и запыленности. Необходимо предусмотреть защиту от мощных электромагнитных помех, от коммутационных перенапряжений и бросков тока. Длительность регистрации до 90 минут, т.е время полного оборота по линии. Это общие требования. А если конкретнее, то для решения поставленных задач требуется измерять постоянный ток с амплитудой до 600 А в пяти точках силовой схемы, три напряжения на каждой группе двигателей, что важно для тормозных режимов, и напряжение в диагонали, скорость вращения оси колеса, пройденный путь, фиксировать позиции реостатного контроллера, управляющего коммутацией пусковых и тормозных сопротивлений двигателей, напряжение вагонной батареи аккумуляторов в диапазоне 63...87 В постоянного тока. И еще для отработки принципа определения движения колеса в режиме юзом или буксования, полного или частичного, были установлены два датчика линейных ускорений. Всего тринадцать датчиков. Все датчики подключаются и закрепляются так, чтобы дополнительное оборудование не могло оказаться причиной ЧП на линии. Это непреложное требование. После выезда за ворота депо на линию возможна только регистрация интересующих параметров, изменить что либо можно только в программном обеспечении. Все датчики находятся либо под высоким напряжением, либо вне салона вагона, за исключением датчиков линейного ускорения. 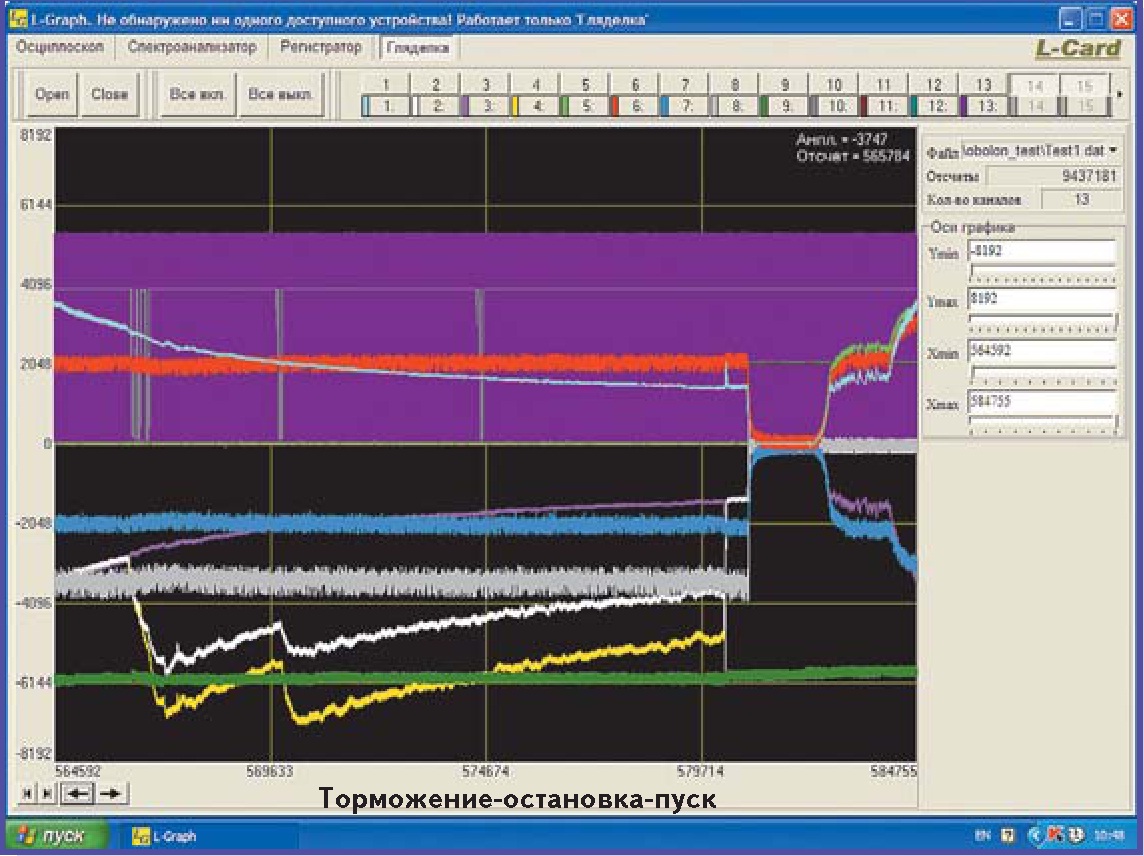 Итак, восемь датчиков силовой схемы - основа измерительной части лаборатории. Измерение постоянного тока большой величины возможно тремя способами: использовать стандартный токовый шунт, измерять падение напряжения на элементах схемы, обтекаемых этим током, или использовать датчики тока на элементах Холла. Стандартный шунт на ток 500 А - это медное, неизолированное изделие с габаритами 180х35х20 мм и весом около килограмма. Внедрить его в существующий монтаж с учетом изоляции в 900 В и надежного механического крепления довольно сложно. Использование шунта потребует гальванической развязки аналогового сигнала. Такое решение есть, но для пяти каналов это уже и громоздко, и дорого. То же самое можно сказать и об измерении падения напряжения, скажем с компенсационной обмотки или дополнительных полюсов двигателя. А если учесть, что их концы не выведены, то говорить о быстроте подключения не приходится. А для мобильной лаборатории это не годится еще и потому, что на каждом вагоне их сопротивление различно и потребуется предварительное точное измерение их сопротивлений, и открытым остается вопрос температурных коэффициентов. Выбор был сделан в пользу датчиков тока HAS-200 фирмы LEM. Недостаток, если это можно считать недостатком, - датчики активные и требуют двухполярного питания. Но зато их габариты всего 40х30х30 мм при сечении окна 20х10 мм, а сам принцип преобразования обеспечивает гальваническую развязку. Диапазон измерения - ± 600 А. Фирма гарантирует точность и объявленные температурные зависимости. Линейность и точность датчика при измерении токов в диапазоне ± 50 А была проверена экспериментально. Идеальная прямая линия. Тоже можно сказать и о датчиках напряжения L-100. С каналом измерения напряжения аккумуляторной батареи пришлось немного повозиться: потребовался делитель, оптоизолирующий линейный усилитель HCPL -7840 и два операционных усилителя. Питание датчиков организовано по схеме "аккумуляторная батарея вагона - предохранитель-фильтр-ограничительные резисторы" и далее на каждый канал "фильтр-стабилитрон-фильтр-предохранитель-DC/DC преобразователь с входным напряжением 36.. 72В. От возможных пиков натуги пришлось подстраховаться двойной фильтрацией, так как наличие множества мощных реле, контакторов и двух электродвигателей, питающихся от аккумуляторных батарей, могут давать большие пики напряжений при их коммутации. Как показали последующие измерения токов в цепях автоматического регулирования скорости и в цепях управления резервным пуском, питающихся от того же вагонного аккумулятора, эти предосторожности оказались не лишними. Интересно отметить, что датчики HAS-200 великолепно регистрируют токи менее одного ампера при неизменном программном коэффициенте усиления и выбросы тока до 20..25А при коммутациях в исследуемых цепях. Это очень важно при настройке максимальной защиты автоматических выключателей. Итак что остается? Совсем чуть-чуть. АЦП, компьютер типа Notebook и программное обеспечение. Для Notebook оптимальным АЦП следует считать модуль преобразователя в формате PCMCIA. Но, к сожалению, это удовольствие "не по карману". Устройства на СОМ-порт - не скоростные, а с LPT в Notebook лучше не связываться - в таких компьютерах даже именитых производителей режимы двунаправленного скоростного обмена очень часто не поддерживаются. Хорошо, что есть USB и микросистема сбора данных Е-440 производства российской фирмы L-card с таким интерфейсом. А еще минимально необходимый софт к ней, а именно программа регистрации, просмотра и анализа. В итоге имеем специализированную мобильную измерительную компьютеризированную лабораторию, включающую блок преобразователей с АЦП, комплект датчиков и соединительные кабели. Первые же поездки с этой техникой позволили: ■ зарегистрировать процессы, протекающие в диагонали силовой цепи, длительность которых составляет 20 - 50 мс; ■ измерить несимметричность токов параллельных групп двигателей при ослаблении поля двигателей на одном из вагонов; ■ зафиксировать неравенство токов в одной из групп двигателей при смене направления движения, обусловленное смещением щеток с геометрической нейтрали; ■ измерить временные интервалы прохождения РК разных позиций; ■ измерить величину ЭДС двигателей в тормозных режимах; ■ оценить колебания напряжения аккумуляторной батареи при коммутациях в схеме управления приводом, особенно при включении двигателя привода РК; ■ увидеть недостатки в принятых решениях по каналам линейных ускорений, необходимость резервирования каналов для контактов типа "сухой контакт", большого количества разъемов в цепи сигнала, удаленности DC/DC преобразователей от датчиков и излишнее усложнение схемы за счет индивидуальной коммутации питающего напряжения каждого DC/DC преобразователя. Впоследствии мобильную лабораторию использовали также для: ■ измерения тока включения кондиционера в кабине машиниста поезда с асинхронными тяговыми двигателями "Славутич"; ■ поверки токовой машины, используемой для регулировки токов срабатывания реле ускорения и торможения РУТ; ■ регистрации пиков токов в системе АРС с целью выявления причин перегорания предохранителей (оказалось - бракованная партия); ■ записи и последующего гармонического анализа сигналов АРС, поступающих по рельсовым цепям через приемные локомотивные катушки. Результаты экспериментов, проведенных на вагонах типа 81- 717, были переданы в институт электродинамики НАН Украины для использования их в работах по созданию полупроводникового тягового привода отечественного вагона метро. В декабре 2005 года планируется задействовать мобильную лабораторию в испытаниях тяговых приводов первого отечественного поезда метро. Нет динамических систем без отклонений. Так и в метро. Мы можем сколь угодно точно рассчитать оптимальные графики движения. Но как двигаться дальше, если, скажем, поезд простоял лишних 20 секунд на станции "Вокзальная", двигаясь в направлении к центру, в часы утреннего пика? Где и с какой интенсивностью нагнать эти секунды? На следующем перегоне "Вокзальная-Университет"? "Университет-Театральная", "Теат-ральная-Крещатик"? Конечно, нет. Эти перегоны короткие, поезд на них под завязку загружен. Нагонять лучше на длинных перегонах и там, где пассажиров стало поменьше. Ответ на такие вопросы по любой станции, на любое отклонение от графика, корректирование которого возможно, должна дать система автоматического регулирования графика. Идея метода проста. На каждой станции в момент отправления определяется отклонение от расчетного графика и движение по предстоящему перегону осуществляется уже по новому оптимальному графику для оставшегося времени движения от текущей станции до конечной. На следующей станции снова переход на новый график, в зависимости от времени, оставшегося до прихода на конечную станцию в соответствии с расписанием. Такая вот замкнутая система. Наилучшая ее реа л иза ция - режим а в-товедения. Реализовать такую замкнутую систему автоматического регулирования графика движения без элементов описанной системы невозможно. Только акценты сместятся с элементов силовой схемы на элементы измерения скорости, точности определения положения поезда на линии. Набор оптимальных графиков получен на самом первом этапе. Это присуще использованному методу оптимизации - методу дискретного динамического программирования. Следует уточнить исходные данные, устранить недостатки привода, найти локальные экстремумы. Хуже с другим. Незаинтересованных экономить машинистов можно заменить автоматикой, а вот какова заинтересованность госпредприятия в экономии электроэнергии? Сегодня сэкономим, а завтра урежут лимиты, и снова будем должны... Последний раз редактировалось Admin; 16.02.2022 в 12:25. |
|
|
Цитировать 14 |
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| Вагоны метрополитена | Admin | Wiki Вагоны | 0 | 22.08.2011 19:43 |
| Максимально задействовать резервы | Admin | xx2 | 0 | 17.07.2011 14:05 |
| Резервы повышения надежности УКСПС | Admin | xx3 | 0 | 03.06.2011 13:07 |
| [ОМ] Резервы лежат под ногами | Admin | Газета "Октябрьская магистраль" | 0 | 17.02.2011 18:15 |
| История Минского метрополитена | Толян | История метро России и стран бывшего СССР | 3 | 30.12.2010 21:14 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , , , , , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|








