



|
|
|
|
#1 (ссылка) |
|
Crow indian







Регистрация: 21.02.2009
Возраст: 41
Сообщений: 30,451
Поблагодарил: 398 раз(а)
Поблагодарили 6046 раз(а)
Фотоальбомы:
2624 фото
Записей в дневнике: 905
Репутация: 126141
|
Тема: [12-2023] Возможности позиционированияВозможности позиционирования На базе института АО «НИИАС» состоялся пятый ежегодный технический семинар, посвященный технологиям позиционирования подвижных транспортных средств. Были представлены результаты разработки и модернизации систем позиционирования и их составных частей, а также итоги испытаний систем навигации различных производителей на базе проводимых поездок на электропоезде «Ласточка» по Московскому центральному кольцу в течение этого года. Эксперты обсудили работу навигационных систем в условиях наличия помех спутниковым сигналам, а также современные методы, технологии, алгоритмы и технические средства для решения задач позиционирования транспорта. Технология позиционирования является ключом для решения множества технологических задач. Высокоточное позиционирование открывает дополнительные возможности для железных дорог. Позиционирование неразрывно связано с электронными картами (цифровая модель пути), что в будущем ведет к созданию цифрового двойника инфраструктуры. При этом постоянно появляются новые вызовы, связанные с подавлением и/или искажением спутниковых навигационных сигналов. Технологии позиционирования на железнодорожном транспорте активно развиваются во всем мире, причем ОАО «РЖД» в этом вопросе находится на лидирующих позициях. Заместитель генерального директора АО «НИИАС» П.А. Попов сделал обзор систем позиционирования на железнодорожном транспорте, реализуемых в Европе. В частности, он рассказал о проекте открытой эталонной архитектуры бортовой системы управления и безопасности OCORA (Open CCS On-board Reference Architecture). В современных реализациях устройства безопасности ETCS функциональность модуля локализации LOC-OB (Localization On-Board) является частью монолитного бортового модуля ETCS. Поскольку ожидается, что циклы инноваций для модуля локализации LOC-OB (не обязательно связанные с обновлением оборудования) будут происходить чаще, чем для остальной части бортового устройства безопасности ETCS, важно, чтобы LOC-OB был отдельным компонентом, содержащим только функциональные возможности, необходимые для безопасного и надежного определения местоположения поезда и его ориентации на пути, а также определения соответствующих кинематических параметров транспортного средства. При разделении функциональности LOC-OB выполняются такие принципы, как модульность и единая ответственность, что приводит к снижению сложности с точки зрения тестирования и сертификации оборудования. Стандартизация внешних интерфейсов LOC-OB позволяет в будущем использовать новые технологии позиционирования без необходимости изменять оставшуюся часть встроенной функциональности ETCS. Более того, архитектура LOC-OB призвана разрушить прочную связь бортового устройства безопасности и технологии бализ, что даст возможность производить независимые от отрасли устройства пози ционирования, придерживаясь стандартизированных интерфейсов. Модуль LOC-OB может предоставлять дополнительную информацию о местоположении: абсолютное (3D) географическое позиционирование, векторы скорости и ускорения в трехмерной системе координат, параметры ориентации (углы крена, тангажа и рыскания) и их скорость изменения. Эта информация о местоположении вычисляется на основе данных, получаемых от датчиков, и вспомогательной информации (например, цифровой карты, дополнительных данных, информации о маршруте) при наличии. Выступление начальника отдела математического обеспечения систем управления АО «НИИАС» В.Ф. Иванова касалось тестирования навигационной аппаратуры потребителей НАП глобальной навигационной спутниковой системы ГНСС на МЦК. ГНСС - это технология, которая используется для определения местоположения автономных тел, находящихся на поверхности Земли. Актуальность данной тематики для АО «НИИАС» заключается в потребности в объективной информации о реальных, недекларируемых характеристиках навигационного оборудования для оценки возможности его применения в составе различных блоков систем управления и безопасности железнодорожного подвижного состава. Однако стоит помнить, что на текущий момент доверять на 100 % выходным данным НАП ГНСС независимо от режима функционирования нельзя. Участники тестирования в свою очередь получили возможность оценить работу оборудования в реальных сложных условиях эксплуатации на железной дороге с динамическими характеристиками электропоезда, а также собрать массивы исходных данных. На их основе разработчики могут в дальнейшем проводить доработки встроенных алгоритмов и программного обеспечения в части решения базовых проблем или с точки зрения их настройки и оптимизации. В качестве испытательного полигона выступило МЦК протяженностью 54 км с плотной окружающей застройкой, наличием контактной сети и около 70 строительных сооружений по пути следования. В итоге состоялось первое масштабное тестирование высокоточной навигационной аппаратуры потребителей ГНСС и интегрированных решений различных производителей, а также точных режимов функционирования в реальных условиях эксплуатации железной дороги. Наличие точной цифровой модели пути с привязкой результатов к пути позволило использовать МЦК как эталон для проверки функционирования навигационного оборудования. Было выполнено сравнение НАП ГНСС различных производителей и сделана оценка возможности их применения для точного позиционирования в составе интегрированных навигационных систем. Испытания показали, что наличие помех оказывает существенное влияние на перераспределение статистики режимов функционирования ГНСС. Это требует дальнейшего анализа для оценки возможности достижения целевых показателей программно-аппаратного комплекса высокоточной системы позиционирования в части требований точности (в первую очередь на маршруте движения). Потенциально возможно организовать доступность навигационного обеспечения на всем пути движения по МЦК. Причем сложные окружающие условия идут «на пользу» при наличии помех. При подавлении помехами базовых станций точная навигация с инициализацией в режиме RTK Fix । метод сбора данных для определения местоположения посредством стационарной базовой станции и одного или нескольких мобильных приемников GPS) будет невозможна. Необходимо дополнительно рассматривать альтернативные способы и алгоритмы точной инициализации интегрированной системы ПАК ВСП (программно-аппаратный комплекс высокоточной системы позиционирования). Наиболее перспективным вариантом является использование высокоточного режима позиционирования РРР (Precise Point Positioning). О результатах эксперимента по изучению помеховой обстановки на МЦК рассказала ведущий специалист АО «НИИАС» И.А. Аникеева. Испытание включало проезд на электропоезде полного круга с регистрацией спектра ГНСС-сигнала и определением местоположения, а также анализ измерений спектра на основе геопространственной информации. 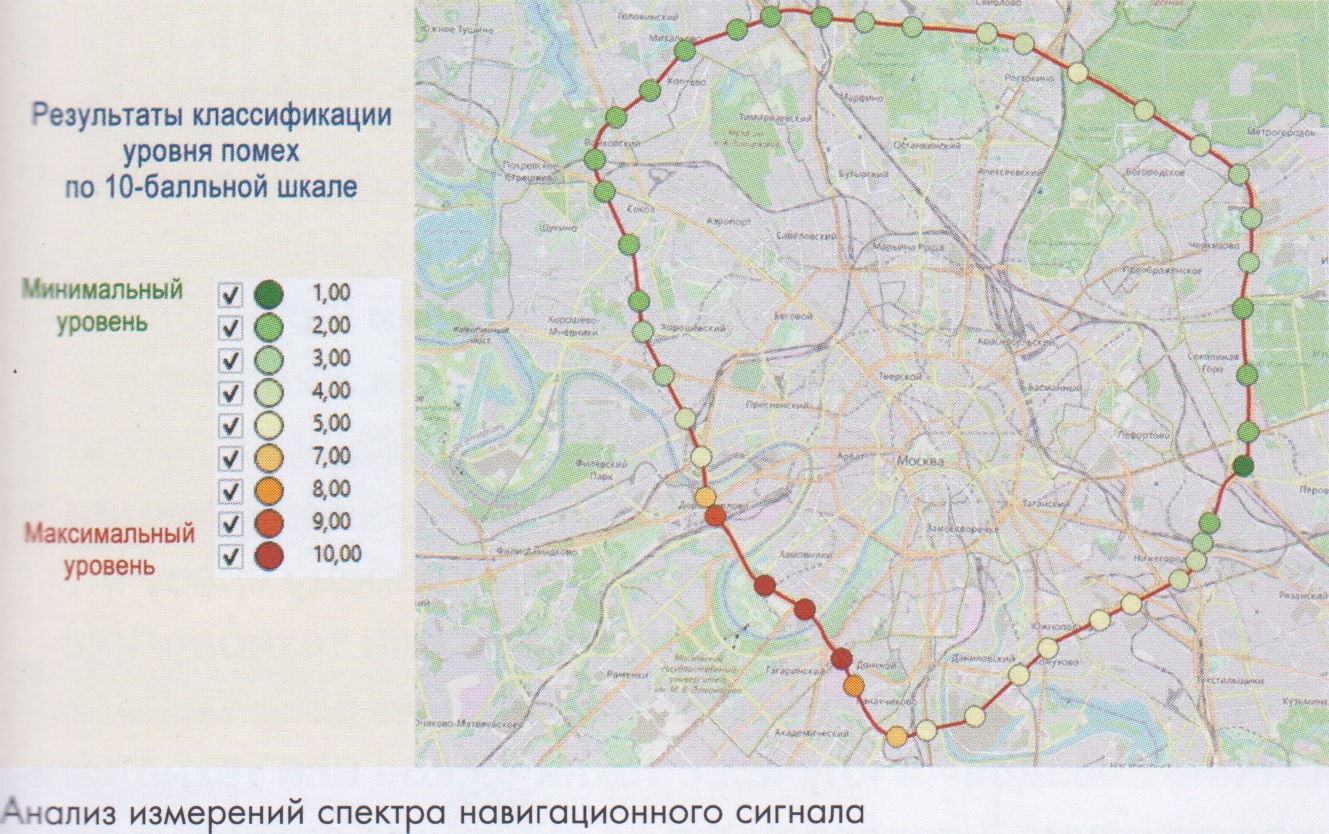 Фотофиксация показала наличие значительного количества пассивных помех. Для дальнейшей оценки помеховой обстановки на МЦК на основе измерений спектра ГНСС-сигнала целесообразно разработать программу и методики проведения оценки помеховой обстановки. Затем, выбрав подходящее оборудование, провести классификацию характера помех (постоянные, периодические, случайные и др.) и серию дальнейших экспериментов. Периодичность измерений спектра, в зависимости от решаемых задач, может составлять от нескольких часов до нескольких месяцев. Периодический мониторинг помеховой обстановки на основе регламентированных методик и требований позволит повысить качество навигационного обеспечения электропоездов МЦК в условиях инду стриальных помех. После всех докладов участники семинара высказали свои предположения по поводу перспектив отечественной электронной компонентной базы, лежащей в основе внедрения отечественных систем искусственного интеллекта, для навигационного оборудования и развития высокоточных сервисов с использованием ГНСС. НАУМОВА Д.В. |
|
|
Цитировать 14 |
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| [03-2023] Автоматизация позиционирования подвижного состава в системах закрепления на железнодорожных станциях | Admin | xx3 | 0 | 15.12.2023 05:49 |
| [10-2023] Возможности развития защитного лесоразведения на Крымском полуострове | Admin | xx1 | 0 | 25.11.2023 06:01 |
| [11-2022] Высокоточные цифровые карты и комплексы позиционирования | Admin | xx3 | 0 | 24.12.2022 07:50 |
| [Новости КТЖ] «Все возможности для развития…» | Анонимный | Новости на сети дорог | 0 | 28.11.2013 17:04 |
| Возможности | Владимир Ковальчук 4276 | Машинисты | 20 | 06.07.2013 00:33 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|










