



|
|
|
|
#1 (ссылка) |
|
Кандидат в V.I.P.







Регистрация: 15.05.2015
Сообщений: 209
Поблагодарил: 0 раз(а)
Поблагодарили 6 раз(а)
Фотоальбомы:
не добавлял
Репутация: -5
|
Тема: [08-1999] Магистральный электровоз ЭП1Магистральный электровоз ЭП1 Микропроцессорная система управления и диагностики (Продолжение. Начало см. “Локомотив” № 7, 1999 г.)  Для обеспечения перечисленных функций в состав МПСУ включены (рис. 1): - комплексное локомотивное устройство безопасности (КЛУБ); - система автоматического управления торможением поездов (САУТ-ЦМ); - микропроцессорные средства управления и диагностики оборудования электровоза; - комплект датчиков, задатчиков и исполнительных устройств. 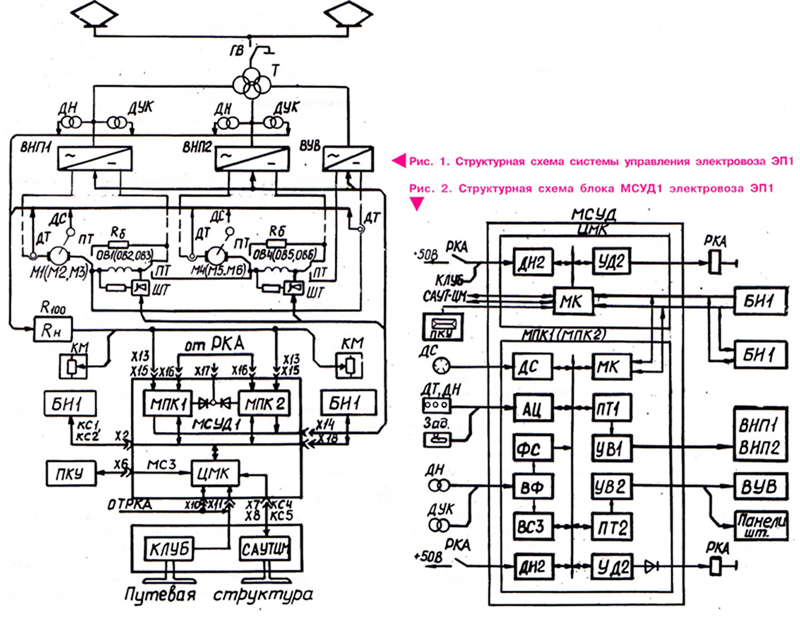 Система КЛУБ контролирует состояние машиниста (однократная и периодическая проверка бдительности), принимает и расшифровывает сигналы АЛСН (АЛСНЕ), осуществляет световое оповещение о смене информации на индикаторе и предельно допустимой скорости. Микропроцессорные средства управления и диагностики оборудования локомотива относятся к нижнему уровню системы и работают в подчинении верхнему уровню. Конструктивно они состоят из блока микропроцессорной системы управления и диагностики (МСУД1), двух блоков индикации (БИ1) пультов машиниста, приемно-контактирующего устройства (ПКУ), последовательных каналов связи (КС1 — КС5) между отдельными элементами системы. Блок МСУД1 содержит три микропроцессорных контроллера — центральный (ЦМК) и два местных контроллера управления (МПК1 и МПК2). ЦМК обеспечивает обмен информацией между контроллерами управления, блоками индикации, приемно-контактирующими устройствами и системой верхнего уровня (САУМ-ЦМ). Он также диагностирует релейно-контакторную аппаратуру (РКА) и другое электрооборудование электровоза. МПК1 и МПК2 обеспечивают управление тяговым электроприводом и преобразователем частоты и фаз (ПЧФ) вентиляторов локомотива. Они сохраняют возможность передачи управления друг другу в случае повреждения одного из контроллеров. БИ1 содержат клавиатуру для управления режимами работы электрооборудования, дисплей для отображения информации и систему голосового вывода. Устройство ПКУ предназначено для ввода данных в систему и вывода на съемную кассету информации о предварительных и аварийных режимах работы оборудования для дальнейшей обработки в депо. Каналы КС1 — КС5 допускают обмен информацией между контроллерами управления и остальными устройствами в последовательном коде. Микропроцессорные средства управления и диагностики обеспечивают следующие режимы работы оборудования электровоза: “Автоведение", “Советчик”, “Ручное управление". В режиме “Автоведение” происходит приоритетное выполнение команд систем КЛУБ и САУТ, соблюдается график движения с обеспечением режимов ведения поезда, рациональных по расходу электроэнергии на тягу; рассчитываются величины для автоматического достижения и поддержания заданной скорости движения с последующей их обработкой. В режиме “Советчик” реализуются ручное управление, а также расчет и выдача машинисту сообщений о скорости движения, обеспечивающей выполнение графика движения поезда и рациональный расход электроэнергии. В режиме “Ручное управление” обеспечивается работа тягового электропривода серийного электровоза ВЛ65. Из одного режима в другой машинист может перейти по своему желанию, нажав на клавиатуре соответствующую кнопку. Вывод информации на дисплей построен по принципу многостраничной справочно-информационной системы. На основном кадре дисплея отображается следующая информация: - собрана ли схема, соответствующий ей режим работы и направление движения электровоза; - заданная и фактическая скорости движения; - заданный и фактический токи якоря; - фактический ток возбуждения тяговых двигателей в режиме электрического торможения; - фактическая сила тяги или торможения; оптимальные значения тока якоря тяговых двигателей и скорости движения электровоза (режим “Советчик”); - номер зоны регулирования ВИП в режиме ручного управления. Машинист может вызывать дополнительные кадры нажатием соответствующих клавиш. На них будут отображены информация о токе якоря каждого тягового двигателя, частоте вращения каждой колесной пары, углах регулирования ВИП и ВУВ, состоянии релейно-контакторной аппаратуры и блока МСУД1, а также данные для режимов “Автоведение” и “Советчик” (текущие координаты пути, ограничение скорости на участке, время отправления и прибытия, астрономическое время). На рис. 1 показана привязка микропроцессорной системы управления к электрооборудованию электровоза ЭП1. Как уже упоминалось, при его проектировании за основу была принята силовая схема локомотива ВЛ65. При этом максимально сохранили принципы управления, привычные для машинистов, обслуживающих эти машины. На рис. 1 приведена упрощенная структурная схема тягового электропривода электровоза ЭП1, включающая тяговый трансформатор ОДНЦ5500/25-У2 (Т), выпрямительно-инверторный преобразователь с ВИП5500 УХЛ2 (ВИП1, ВИП2), выпрямительную установку возбуждения ВУВ-118 (ВУВ), тяговые двигатели с опорно-рамным подвешиванием НБ-520В (М1 — Мб, ОВ1 — ОВ6), тиристоры выравнивания нагрузок (ШТ), расположенные на панелях ПТ-246, тормозной переключатель ПТ и балластные резисторы Rg. В режиме тяги с помощью тормозного переключателя ПТ обмотки возбуждения (ОВ1 — ОВ6) тяговых двигателей (М1 — Мб) соединены последовательно с якорями и запитываются от выпрямительно-инверторных преобразователей (ВИП1 и ВИП2). В режиме рекуперативного торможения тормозные переключатели ПТ занимают противоположное (относительно показанного) положение. При этом последовательно с якорями тяговых двигателей (М1 — Мб) подключаются балластные резисторы Rg, обеспечивающие устойчивость работы ВИП в режиме инвертирования. Обмотки возбуждения ОВ1 — ОВ6 соединяются последовательно и запитываются от ВУВ. В этом режиме с помощью шунтирующих тиристоров ШТ, регулируя отпитку тока возбуждения конкретного двигателя, можно приблизить ток якоря данного двигателя к току максимально загруженного двигателя и тем самым уменьшить разброс токов между параллельно включенными машинами. На схеме изображены также датчики, показания которых используются в алгоритмах управления тяговым приводом и оборудованием. В отличие от серийных локомотивов ВЛ65 в данной схеме использованы все датчики токов (ДТ) LT-1000 фирмы “TBE-LEM". При этом введена панель нагрузок этих датчиков RH (100). В качестве датчиков частоты вращения (ДС) использованы импульсные датчики ДПС-У. Трансформатор синхронизации выполнен с выходным напряжением 50 В (при напряжении контактной сети 25 кВ), что позволило облегчить тепловой режим блока МСУД1. Датчики углов коммутации (ДУК) аналогичны устройствам электровозов ВЛ65. На рис. 2 изображена структура аппаратных средств блока МСУД1. Поскольку МПК1 и МПК2 одинаковы, они показаны в виде одного устройства. МПК и ЦМК выполнены на основе одинаковых ячеек. Отличием является ячейка микропроцессора (МК), которая в ЦМК содержит дополнительные последовательные порты, преобразующие параллельный код в последовательный и обратно. Это позволяет обмениваться информацией с разнесенными в пространстве устройствами. Помимо ячейки МК, ЦМК содержит две ячейки дискретного ввода информации ДИ2 (48 входов) и три ячейки дискретного вывода УД2 (24 выхода). К дискретным входам ЦМК подключаются сигналы светофоров и демодулированный сигнал КПТ (коды путевого трансмиттера) для анализа смены блок-участков, а также сигналы от РКА электровоза для диагностики его состояния. Дискретные выходы ЦМК используются для управления электропневматическим тормозом и переключения МПК1/МПК2 в случае обнаружения неисправности одного из них. Сигналы от датчиков системы и РКА поступают одновременно на соответствующие входы МПК1 и МПК2. Они объединены по схеме монтажного ИЛИ и управляют соответствующим оборудованием. Рассмотрим схему одного из контроллеров (именуемых в дальнейшем МПК). В основе МПК лежит ячейка МК, содержащая процессор фирмы “Octagon Systems” (США) 80386DX с тактовой частотой 25 МГц. Он имеет равные объемы постоянного запоминающего и оперативного запоминающего устройств по 1 Мбайт, два последовательных порта с интерфейсом RS-485. Процессор этих контроллеров работает по прерываниям от импульсов синхронизации по сети. Таким образом, он привязывает работу МПК к первой гармонике напряжения контактной сети. В результате в каждый полупериод по сигналам датчиков и задатчиков контроллера машиниста обеспечивается технологическая программа и выдается управляющее воздействие на исполнительные устройства. Сказанное определяет необходимый состав внешних устройств. Процессор связан с датчиками скорости ДС через ячейку ДС, которая принимает импульсы, обеспечивает их гальваническую развязку и преобразование в десятиразрядный двоичный код скорости. Кроме того, на ячейке ДС по сигналам с датчиков определяется истинное направление движения электровоза. Одна ячейка ДС обслуживает 6 датчиков скорости, расположенных на осях, причем два из них использованы одновременно и в системе САУТ-ЦМ. Через ячейки аналого-цифрового преобразователя (АУ) процессор связан с аналоговыми датчиками тока (ДТ), напряжения (ДН) и сельсинами-задатчиками (Зад) контроллера машиниста. МПК содержит две ячейки АУ. Каждая ячейка параллельно за один полупериод преобразовывает 8 аналоговых сигналов 0 — 10 В в десятиразрядный код. Для увеличения помехозащищенности в ячейках АУ применены аналого-цифровые преобразователи интегрирующего типа. Сигналы от датчиков углов коммутации (ДУК), слежения за потенциальными условиями и синхронизации (ДН) предварительно обрабатываются в ячейке ВФ, в которой установлены необходимые выпрямители, делители и фильтры. В дальнейшем эти сигналы обрабатываются на ячейках синхронизации ФС и обработки входных сигналов ВСЗ. На ячейке ФС из сигнала датчика синхронизации выделяется первая гармоника напряжения, частота и фаза которой синхронизированы с частотой и фазой напряжения контактной сети. На ее основании формируются импульсы синхронизации, сигнал полярности полупериода, тактовая частота преобразователей “код- фаза” и “длительность—код", сигнал блокировки, запрещающий выдачу управляющих импульсов на время вхождения в синхронизм с напряжением контактной сети. Ячейка ВСЗ содержит необходимые компараторы, логические цепи, преобразователи “длительность—код”, при помощи которых формируется двоичный код сигналов ДУК и слежения за потенциальными условиями. В дальнейшем он используется процессором. Сигналы о состоянии схемы электровоза, положении органов контроллера машиниста вводятся в МПК через ячейку ДИ2, аналогичную использованной в ЦМК. МПК содержит одну ячейку ДИ2. Формирование и распределение фазовых импульсов, управляющих ВИП, осуществляется в ячейках ПТ1, а управляющих ВУВ и ШТ — в ячейках ПТ2. Их работа синхронизирована с первой гармоникой напряжения контактной сети. Затем сформированные импульсы усиливаются соответственно в ячейках УВ1 (ВИП) и УВ2 (ВУВ и ШТ) и поступают на исполнительные устройства. МПК оснащены также ячейками УД2, позволяющими автоматически переводить схему локомотива из режима тяги в электрическое торможение и обратно. МПК содержит две ячейки УД2, что позволяет обслуживать до 16 управляемых каналов РКА. Следует отметить, что нагрузочная способность одного канала дискретного выхода не превышает 1,5 А. Поэтому в отдельных случаях на электровозе ЭП1 используется запараллеливание выходов, обеспечивающее необходимый ток нагрузки. Взаключение следует привести результаты исследований прототипа этой системы МСУД, установленной на электровозе ВЛ65 № 021. Испытания машины в режимах тяги и электрического торможения показали, что применение микропроцессорной системы управления на электровозе ВЛ65 с тяговыми двигателями НБ-514 не изменило основные тягово-энергетические характеристики. Коэффициент полезного действия в продолжительном режиме составил 0,852, а коэффициент мощности — 0,835, что соответствует требованиям технических условий. В то же время отмечалась эффективная работа системы выравнивания нагрузок, существенно повышающей равномерность распределения токов по тяговым двигателям на высоких скоростях движения. Кроме того, в режиме рекуперативного торможения при имитации вынужденного и аварийного энергоснабжения (сопротивление контактной сети до 18 Ом, наличие искажающих конденсаторов 0,5 мкФ) автоматизированная система управления успевала отслеживать все скачки и искажения питающего напряжения. Электровоз уверенно тормозился с максимальной скорости (120 км/ч) до полной остановки с максимальными токами. На участке Краснодар — Тимашевская Северо-Кавказской дороги проводились испытания с пассажирским поездом № 911/912 в режиме “Автоведение”. Они подтвердили работоспособность системы в данном режиме. Точность поддержания графика составила 1 — 1,5 мин. Схема управления автоматически переходила из режима тяги в рекуперацию и обратно без вмешательства машиниста. Переход из режима “Автоведение" в режим “Советчик" происходил после перевода главной рукоятки из положения “П” или рукоятки скорости из положения “О", при остановке на запрещающий сигнал светофора, срыве стоп-крана. Переход в режим “Автоведение" возможен при нажатии кнопки “Автоведение” БИ. Проведенные испытания подтвердили работоспособность системы в целом, и она была рекомендована к внедрению на электровозах ЭП1. Канд. техн. наук В.И. ПЛИС,
инж. В.С. КИРИЛЛОВ, ОАО «ВЭлНИИ» |
|
|
Цитировать 0 |
|
|
#2 (ссылка) |
|
Робот

Регистрация: 05.05.2009
Сообщений: 1,496
Поблагодарил: 0 раз(а)
Поблагодарили 82 раз(а)
Фотоальбомы:
не добавлял
Репутация: 0
|
Тема: Тема перенесена |
|
|
Цитировать 0 |
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| Электровоз магистральный 2ЭС5К (3ЭС5К) "Ермак" - Руководство по эксплуатации | Admin | Тяговый подвижной состав | 19 | 29.05.2026 05:55 |
| [Видео] Электровоз ЭП10 — двухсистемный пассажирский электровоз | Андрей13 | Машинисту электровоза | 7 | 17.03.2017 10:27 |
| [09-1999] Магистральный электровоз ЭП1 | poster444 | xx2 | 0 | 19.05.2015 19:34 |
| [10-1999] Магистральный электровоз ЭП1 | poster444 | xx2 | 0 | 18.05.2015 15:10 |
| [12-1999] Электровоз двойного питания ЭП10 | poster444 | xx2 | 0 | 16.05.2015 14:32 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , , , , , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|








