



|
|
|
|
#1 (ссылка) |
|
Crow indian







Регистрация: 21.02.2009
Возраст: 41
Сообщений: 30,437
Поблагодарил: 398 раз(а)
Поблагодарили 6046 раз(а)
Фотоальбомы:
2624 фото
Записей в дневнике: 905
Репутация: 126141
|
Тема: [07-2012] Автоведению локомотивов - зеленый светАвтоведению локомотивов - зеленый свет Принципы, лежащие в основе современных разработок систем автоведения Научно-исследовательского и конструкторско-технологического института подвижного состава (ОАО «ВНИКТИ»), были опробованы при создании системы автоведения на базе микропроцессорных систем управления АСУБ «Локомотив» в 1998 — 2000 гг. и МСУД на тепловозе ТЭП70-316 (приписки депо Санкт-Петербург-Витебский) в 2007 — 2008 гг. Дальнейшее развитие эти принципы получили благодаря разработке и внедрению микропроцессорной системы управления и диагностики (МСУ-ЭП) с функцией автоведения на электровоз ЭП2К № 030 (приписки депо Санкт-Петербург-Пассажирский-Московский) в 2009 г., где он эксплуатируется по настоящее время. Структурная схема подсистемы автоведения приведена на рис. 1. Данная подсистема реализована на базе системы МСУ-ЭП, в состав которой входят: ♦ устройство обработки информации (УОИ); ♦ дисплейный модуль первой и второй кабин (ДМ1 и ДМ2); ♦ комплект датчиков и кабелей связи; ♦ модем GSM/GPRS; ♦ антенна; ♦ энергонезависимое запоминающее устройство (flash-диск); ♦ звуковая система. При ее работе используются связи УОИ по CAN-интерфей-сам со следующими устройствами: О системой КЛУБ-У через блок ШЛЮЗ-CAN; О САУТ-ЦМ через блок ШЛЮЗ-CAN; 3 краном машиниста № 130 (УКТОЛ). Текущая координата пути, допустимая скорость движения и сигналы АЛСН принимаются от системы безопасности КЛУБ-У. Чтобы управлять режимами тяги и электрического торможения, используется аппаратура МСУ-ЭП. Управление пневматическим и электропневматическим тормозами осуществляется дистанционно через кран машиниста № 130. Подсистема автоведения обеспечивает: 0 автоматическое управление режимами тяги, электродинамического, электропневматического и пневматического торможения; 0 соблюдение постоянных и временных ограничений скорости, а также ограничений, накладываемых показаниями локомотивного светофора; 0 соблюдение расписания с точностью ±30 с. Есть два режима исполнения расписания: с соблюдением времени прохождения всех обязательных контрольных точек пути или контрольных точек, заданных машинистом. Происходит автоматический переход в режим нагона времени в случае отставания от графика движения; 0 автоматическое включение и отключение режима движения «по удалению» с возможностью его отмены машинистом; 0 расчет траектории движения поезда с учетом минимизации расхода электроэнергии; 0 автоматический (со специально подготовленного съемного носителя) или ручной (машинистом) ввод в диалоге информации о номере поезда, количестве вагонов, весе поезда, составе временных ограничений скорости; 0 отображение необходимой для машиниста информации (текущая и расчетная скорости, расположение светофоров, препятствий, постоянные и временные ограничения скорости, расположение станций, графиковое и прогнозируемое время прибытия на следующую станцию, профиль пути и др.). При этом расчетная скорость поезда показывается в виде графика скорости на ближайшие 5 км, что позволяет сделать прогноз будущего режима ведения поезда; 0 выдачу машинисту речевой предупредительной информации о смене сигнала локомотивного светофора, о подъезде к местам временных ограничений скорости, наличии на пути искусственных сооружений (переездов, мостов, переходов), о необходимости провести пробу тормозов, о подъезде к станции с остановкой по графику и т.д. При расчете траектории движения используется следующий приоритет выполняемых функций: обеспечение безопасности движения, которое достигается безусловным соблюдением всех видов ограничений скорости, правил подъезда к светофорам, ограничивающим или запрещающим движение; соблюдение расписания движения с точностью ±30 с и автоматическим нагоном времени при наличии опоздания; комфортность пассажиров, которая обеспечивается благодаря накладываемым при расчете ограничениям на управление, предотвращающим появление продольно-динамических сил в составе из-за резких переходов из режима тяги в торможение и обратно, а также особенностей профиля пути; экономия электроэнергии за счет выбора рациональных режимов движения поезда с максимальным использованием имеющегося запаса кинетической энергии состава и сведения к минимуму времени нахождения на реостатных позициях.  Обязательным условием перевода локомотива в режим автоведения является успешно завершенный ввод параметров, в ходе которого машинисту необходимо ввести в подсистему автоведения количество вагонов, вес поезда (с локомотивом), его номер, а также временные ограничения скорости движения. Кадр ввода параметров автоведения представлен на рис. 2. После ввода номера поезда машинисту на протяжении всего пути доступна опция корректировки расписания. Кадр корректировки расписания дисплейного модуля представлен на рис. 3. Машинист по команде диспетчера может изменить время прибытия на выбранную станцию, отменить техническую стоянку на ней, а также выбрать контрольные точки в расписании движения. При следовании с соблюдением расписания в режиме «по контрольным точкам» подсистема автоведения соблюдает время прохождения только тех станций, которые заданы контрольными. После успешного ввода исходных данных на экране дисплейного модуля становится доступным окно «Навигатор», в котором отображается информация о пути следования поезда из бортовой базы данных подсистемы автоведения. Для входа в режим автоведения машинист должен выполнить следующие действия: ► на нулевой или любой ходовой позиции контроллера машиниста (без ослабления поля) и при поездном положении тормозного крана нажать кнопку «Автоведение»; ► когда на экране дисплейного модуля появится системное сообщение «Установите контроллер в положение «Н», перевести контроллер в положение «Н». Система управления проверит исправность всех датчиков и цепей управления (использование функции автоведения на аварийных схемах работы электровоза, а также с отключенными тяговыми двигателями и блоками резисторов запрещено), а также наличие входных данных. Если нет признака успешно завершенного ввода параметров автоведения, то на экране дисплейного модуля появится сообщение «Введите исходные данные». При наличии всех исходных данных в подсистеме автоведения на экране появится кадр «Навигатор. Режим “автоведение”». Пример зафиксированного кадра автоведения приведен на рис. 4. В этом режиме на экран выводится следующая информация: ► системное (московское) время (часы, минуты, секунды), текущая дата (день, месяц, год) и режим управления («Автоведение», «Советчик»); ► целевая позиция контроллера машиниста системы автоведения и режим; ► название текущего пункта контроля (станции) и времени прибытия на него (из расписания, часы, минуты); ► прогнозируемое время прибытия на следующий пункт контроля времени при режиме управления «Автоведение» (часы, минуты). Оно не отображается в случае движения на красножелтый и желтый сигналы локомотивного светофора; ► действующая тяговая позиция системы управления, режим работы локомотива, соединение двигателей; ► фактическая скорость поезда в виде графика (км/ч), на котором с помощью визира указываются числовое значение скорости и настоящее положение поезда (желтым цветом); ► на ближайшие 5 км: график (км/ч) ограничений скорости (красным цветом), расчетную траекторию движения по скорости (зеленым цветом), расположение светофоров с их названиями, показание по сигналам АЛСН (АПС-ЕН) следующего светофора, расположение впереди лежащих искусственных сооружений (переезды, мосты и др.) и продольный профиль пути; ► фактический максимальный ток тяговых двигателей; ► заданный на контроллере машиниста ток перехода; ► средняя скорость на перегоне; ► расстояние до следующей станции; ► время движения до станции по расписанию (окрашивается в красный цвет при опоздании). Для перехода в кадр настройки (рис. 5) режима автоведения необходимо в основном кадре автоведения нажать клавишу «Настройки». В этом кадре можно задать следующие параметры функции автоведения: максимальное соединение, которое будет использовать система; давление в тормозных цилиндрах 1-й ступени торможения ЭПТ; разрядку тормозной магистрали 1-й ступени торможения ПТ; режим исполнения расписания; выбирается из двух возможных вариантов: по перегонам — с соблюдением времени прохождения всех контрольных пунктов расписания движения, по контрольным точкам — с соблюдением времени прохождения пунктов, отмеченных как контрольные точки в расписании движения; регулировку громкости речевой предупредительной информации; <=> изменение участка движения поезда. Любое вмешательство в органы управления машинистом (рукоятка контроллера машиниста, тормозного крана, кнопка «Автоведение») приводит к выходу из автоведения с фиксацией последней установленной в системе управления позиции (режима работы) и автоматическим включением режима советчика. В темное время суток у машиниста есть возможность настроить яркость дисплея, а также перейти в ночной режим основных кадров дисплея с повышенной контрастностью. Отличительными особенностями подсистемы автоведения являются: интеграция в систему управления на функциональном уровне, не требующая установки дополнительных блоков на локомотив; ♦ привязка координаты подсистемы автоведения к координате, получаемой от КЛУБ-У; ♦ возможность удаленного доступа к зарегистрированным параметрам движения поезда; ♦ графическое построение траектории движения, позволяющее машинисту прогнозировать режим ведения поезда до следующей станции. 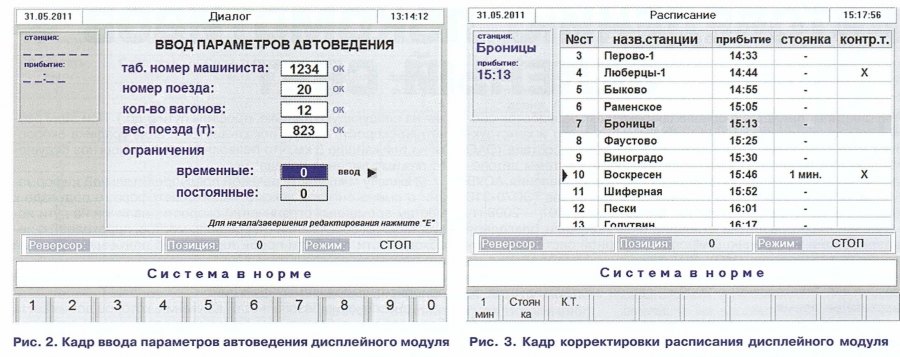 В течение эксплуатационных испытаний системы специалисты ОАО «ВНИКТИ» сопровождали электровоз в поездках, фиксируя все замечания машинистов по режимам ведения поезда подсистемой автоведения, введения настроек тех или иных параметров подсистемы, а также вида основного и вспомогательных кадров в режиме автоведения. По итогам каждой поездки вносились корректировки в программное обеспечение. Вид кадров дисплейного модуля электровоза ЭП2К-030 полностью соответствует требованиям «Методических рекомендаций по оптимизации алгоритма, методов и механизмов информационного обеспечения машинистов магистральных локомотивов, работающих без помощников в пассажирском и грузовом движении», утвержденных распоряжением ОАО «РЖД» от 17.12.2009 № 2606р. 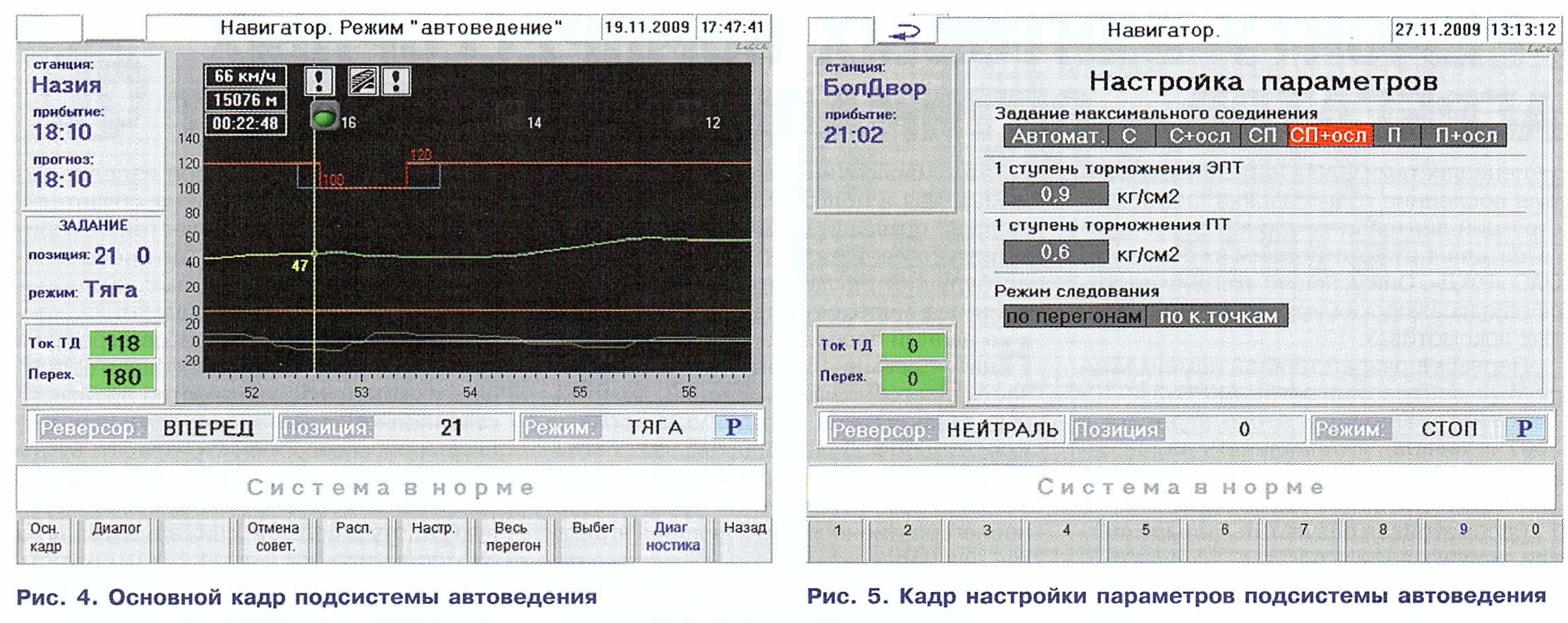 Для определения энергоэффективности функции автоведения в рамках эксплуатационных испытаний было проведено 30 контрольных поездок с поездом № 71/72 на участке Санкт-Петербург — Бабаево — Санкт-Петербург (состав находился в режиме автоведения более 75 % пути). Средний удельный расход электроэнергии составил 113,2 кВт-ч/10 тыс. т-км брутто, что на 7,2 % меньше по сравнению с нормой удельного расхода для электровозов ЭП2К (122 кВт-ч/10 тыс. т-км брутто). Подсистема автоведения разработки ОАО «ВНИКТИ» реализована также на опытном тепловозе ТЭП70БС-156. Эксплуатационные испытания тепловоза с данной системой, проходившие на Приволжской дороге под управлением машинистов локомотивного депо Саратов, показали, что экономия топлива по сравнению с установленной нормой расхода составила 7,9 %. В настоящее время рассматривается вопрос о серийном внедрении подсистемы автоведения на тепловозах ТЭП70БС. Канд. техн. наук С.И. КИМ, инженеры А.А. ПРОНИН, Л.М. ВОРОНКОВА, ОАО «ВНИКТИ» |
|
|
Цитировать 14 |
|
|
#2 (ссылка) |
|
Робот

Регистрация: 05.05.2009
Сообщений: 1,496
Поблагодарил: 0 раз(а)
Поблагодарили 82 раз(а)
Фотоальбомы:
не добавлял
Репутация: 0
|
Тема: Тема перенесена |
|
|
Цитировать 0 |
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| [07-2012] Стратегия интеллектуального ремонта локомотивов | Admin | xx2 | 0 | 16.08.2012 15:30 |
| =Приказ= № ЦТР-227 от 28 мая 2012 г. - Об организации проведения неплановых ремонтов локомотивов | Admin | Документы Дирекции тяги ОАО "РЖД" | 1 | 06.06.2012 17:01 |
| [Гудок] [22 апреля 2012] Экономный свет | Admin | Газета "Гудок" | 0 | 01.05.2012 00:11 |
| Распоряжение №22р от 13 января 2012 г. Об установлении контроля за комплектностью локомотивов, направляемых в ремонт на локомотиворемонтные заводы | Grin59 | 2012 год | 0 | 20.02.2012 16:27 |
| [Новости УЗ] ЭЛЕКТРИФИКАЦИИ – ЗЕЛЕНЫЙ СВЕТ. | Кабанбай Батыр | Новости на сети дорог | 0 | 29.07.2011 17:10 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , , , , , , , , , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|










