Американский марсоход Curiosity 6 августа достигнет поверхности Марса
Марсоход Curiosity входит в состав американской экспедиции Mars Science Laboratory (MSL). Запуск ракеты-носителя с лабораторией состоялся 26 ноября 2011 года.
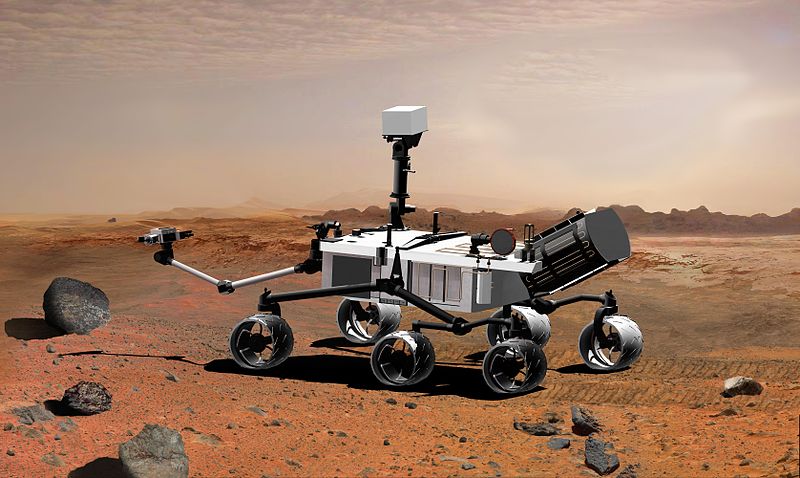 Рисунок художника - Curiosity едет по поверхности Марса
Рисунок художника - Curiosity едет по поверхности Марса спускаемый аппарат с марсоходом Curiosity на борту должен приземлиться на поверхность Красной планеты. Curiosity - самый крупный из марсоходов, которые применялись до сих пор.
Аппарат за несколько месяцев пройдет от 5 до 20 километров и проведет полноценный анализ марсианских почв и компонентов атмосферы. Космический корабль доставки будет снабжён вспомогательными ракетными двигателями для контролируемой и более точной посадки, которые до этого при спуске марсоходов не использовались.
 Сравнение марсоходов Mars Science Laboratory, Spirit и Sojourner
Сравнение марсоходов Mars Science Laboratory, Spirit и Sojourner
 Сравнительные размеры марсоходов
Сравнительные размеры марсоходов
Марсоход Curiosity имеет 3 метра в длину, 2,1 метра в высоту с разложенной камерой и 2,7 метра в ширину. Диаметр колёс составляет примерно 51 сантиметр. Вес марсохода — 900 килограммов (включая 80 килограммов исследовательского оборудования) Для сравнения, масса Лунохода-2 — 836 кг, диаметр колёс — 510 мм.
На поверхности Марса MSL будет способен преодолевать препятствия до 75 сантиметров в высоту. Максимальная предполагаемая скорость на пересечённой местности будет составлять 90 метров в час при автоматической навигации. Средняя же скорость предположительно составит 30 метров в час. Ожидается, что за время двухлетней миссии MSL пройдёт не менее 19 километров.
Конструкция прибора подобна тем, что использовались ранее — платформа с научными приборами на шести колёсах, каждое из которых имеет свой электродвигатель, причём передние и задние два колеса будут участвовать в рулении, что позволит аппарату разворачиваться на 360 градусов, оставаясь при этом на месте. Он будет втрое тяжелее прежних марсоходов и обойдется в 2,3 миллиарда долларов.
Вместо солнечных батарей в качестве источника энергии будет использован РИТЭГ, избавляя от проблемы запыления панелей солнечных батарей и простоев аппарата в ночное время. Выбранный РИТЭГ нового поколения способен снабжать марсоход энергией в течение 14 лет при радиоактивном распаде плутония-238. Мощность генерируемой электроэнергии составит 110 ватт.
Космический аппарат будет состоять из трёх модулей — перелётного, посадочного и ровера-марсохода. Масса космического аппарата — 3,4 т, ровера — 930 кг, масса научной аппаратуры, установленной на ровере — 80 кг.
Посадочная система
Спуск на поверхность Марса большой массы весьма затруднителен. Атмосфера слишком плотная, чтобы позволить ракетным двигателям обеспечить существенное торможение, поскольку общеизвестно, что использование тяги реактивной струи на сверхзвуковых скоростях сопряжено с нестабильностью. При этом атмосфера слишком разреженная, чтобы парашюты и аэродинамическое торможение оказались эффективны. Хотя некоторые предыдущие миссии использовали аэробаллоны для смягчения удара при посадке, MSL слишком большая для использования этого варианта.
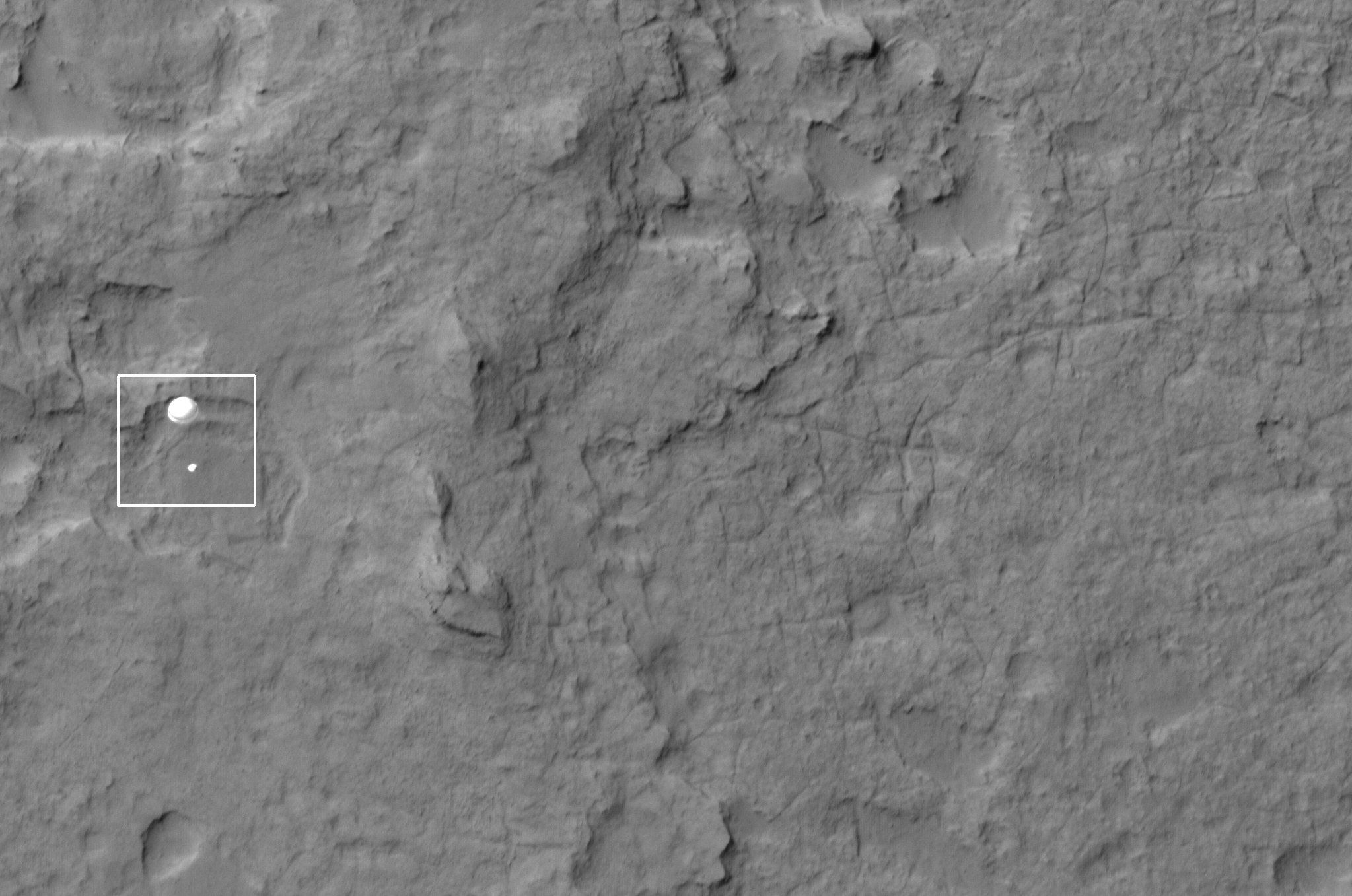
Curiosity выполнит спуск на поверхность Марса используя систему высокоточного входа в атмосферу, снижения и посадки (EDL), которая обеспечит попадание в пределах 20-километрового эллипса посадки, в отличие от эллипса 150 км на 20 км систем посадки марсоходов Mars Exploration Rovers (Spirit и Opportunity).
Для этого MSL применит комбинацию нескольких систем в точном порядке, при котором последовательность, состоящая из входа в атмосферу, снижения и посадки, разделится на 4 части.
Управляемый вход в атмосферу
Марсоход сложен внутри аэродинамической капсулы, предохраняющей его во время космического перелёта и входа в атмосферу Марса. Вход в атмосферу выполняется с помощью абляционного теплозащитного покрытия из углеродных волокон, пропитанных фенолформальдегидной смолой (PICA). Это теплозащитное покрытие диаметром 4.5 м — самое большое из когда-либо запущенных в космос — замедлит за счёт абляции движение космического аппарата в марсианской атмосфере со скорости межпланетного перелёта 5.3…6 км/с до двукратной скорости звука (приблизительно), при которой возможно раскрытие парашюта. Большая часть компенсации ошибки при посадке выполняется алгоритмом управляемого входа в атмосферу, похожим на применявшийся астронавтами, возвращавшимися на Землю в ходе программы Apollo. Это управление использует подъёмную силу, создаваемую аэродинамической капсулой, чтобы нивелировать любую обнаруженную ошибку по дальности и тем самым прибыть на выбранное место посадки. Чтобы аэродинамическая капсула обеспечивала подъёмную силу, её центр масс смещён от центральной оси, что вызывает наклон капсулы при атмосферном полёте, опять же аналогично командному модулю Apollo. Это достигается набором сбрасываемых балластов. Вектор подъёмной силы управляется четырьмя блоками двигателей реактивной системы управления, каждая пара которых создаёт тягу около 500 Н. Способность изменять точку приложения подъёмной силы позволяет космическому аппарату реагировать на окружающую среду и маневрировать к зоне посадки. Перед раскрытием парашюта капсула сперва должна сбросить балласты так, чтобы устранить смещение центра тяжести. Затем на высоте около 10 км при скорости 470 м/с раскроется парашют.
Снижение под парашютом
Когда завершится этап входа в атмосферу и капсула замедлится до двукратной скорости звука, на высоте около 7 км будет сброшено теплозащитное покрытие. Затем MSL раскроет сверхзвуковой парашют, как это выполнялось в предыдущих миссиях, таких как Viking, Mars Pathfinder и Mars Exploration Rovers.
В марте и апреле 2009 парашют MSL был испытан в крупнейшей в мире аэродинамической трубе и прошёл лётные испытания. Парашют имеет 80 строп, длину более 50 м и диаметр около 16 м. Парашют имеет возможность раскрытия при скорости 2.2 М и способен давать тормозное усилие до 289 кН в марсианской атмосфере.
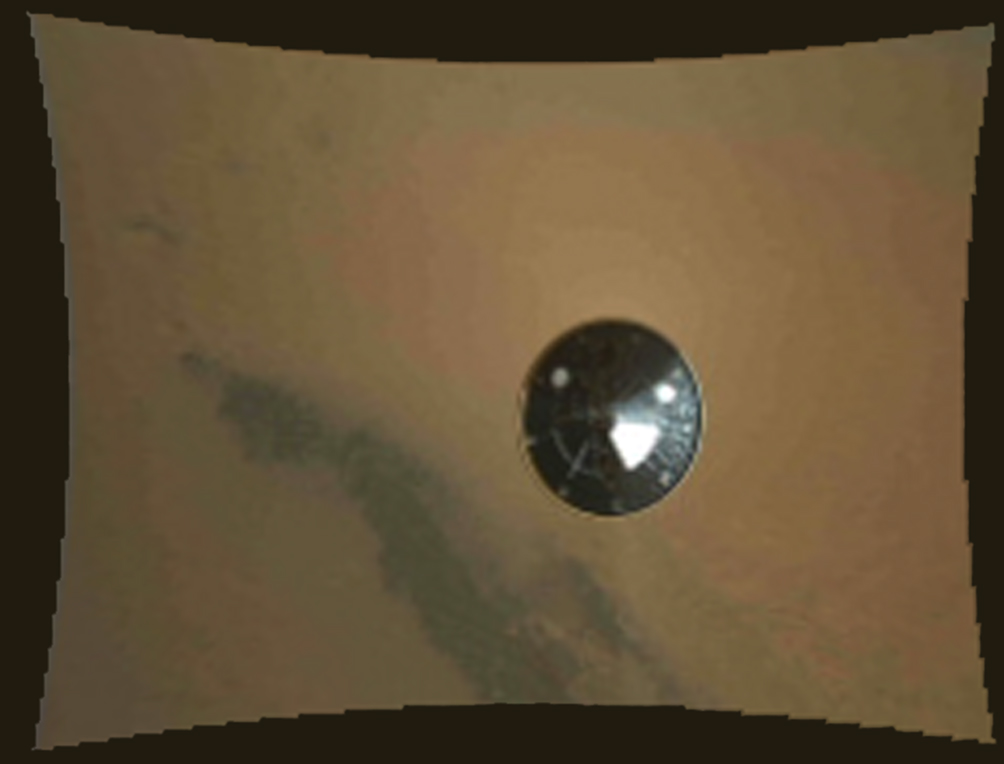
На высоте ниже 3.7 км фотокамера, установленная на нижней поверхности марсохода, будет снимать примерно по 5 кадров в секунду (с разрешающей способностью 1600×1200 пикселей) в течение приблизительно двух минут — до подтверждения посадки марсохода на поверхность Марса.
Снижение с использованием тяги двигателей
После торможения парашютом, на высоте около 1.8 км, двигаясь со скоростью около 100 м/с, марсоход и спускаемый аппарат отделятся от капсулы. Спускаемый аппарат — это платформа над марсоходом с гидразиновыми монотопливными ракетными двигателями с переменной тягой, установленными на штангах, выступающих в стороны от платформы, для замедления снижения. Каждый из 8 двигателей этого модуля создаёт тягу до 3.1 кН и разработан на основе двигателей, использовавшихся на посадочных модулях Viking. В это время марсоход будет переведён из перелётной конфигурации (сложенное состояние) в посадочную, при этом опускаясь под спускаемым аппаратом с применением системы Sky crane («небесный кран»).
Небесный кран
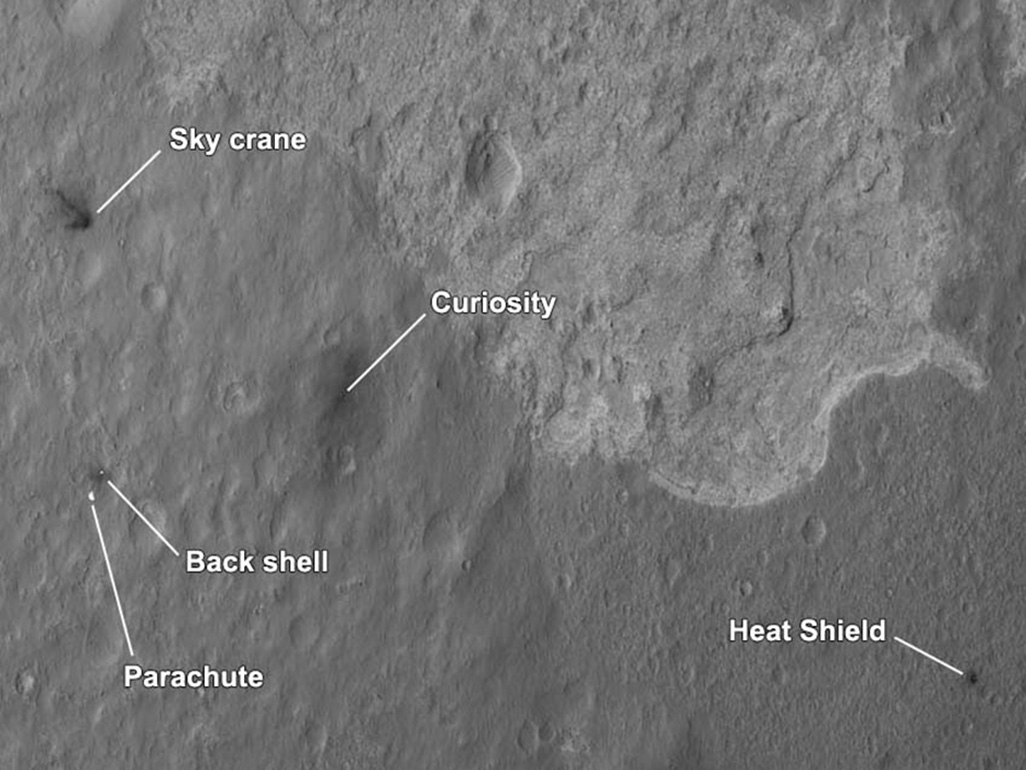
Система Sky crane («небесный кран») мягко опустит марсоход колёсами вниз на поверхность Марса. Система состоит из 3 тросов, опускающих марсоход, и электрического кабеля, связывающего спускаемый аппарат и марсоход. Опустив марсоход примерно на 7.5 м ниже спускаемого аппарата, система плавно остановится, и марсоход коснётся поверхности. После того, как марсоход коснётся поверхности, он ждёт 2 секунды для подтверждения того, что он находится на твёрдой поверхности, и приводит в действие пироножи на тросах и электрических кабелях, чтобы отделить себя от спускаемого аппарата. Спускаемый аппарат сразу улетает и совершает жёсткую посадку, и марсоход готовится к передвижению по Марсу. Эта система снижения и посадки с использованием тяги двигателей и «небесного крана» никогда ранее не применялась в реальных миссиях.
Как скачать на компьютер это видео?
Особенности марсохода - Роботизированная «рука»
В передней части марсохода имеется «рука» длиной примерно 1,8 метра. Она достаточно сильна, чтобы выдержать человека, повисшего на её конце. Она во многом похожа на руку человека: есть подобия плеча, локтя и кисти, благодаря чему она может вытягиваться и сгибаться подобно руке человека.
На конце манипулятора установлено несколько научных инструментов: небольшой бур, лопатка для сбора образцов грунта и пыли и другие. Таким образом он сможет собирать образцы пород грунта, камней и пыли и доставлять их во внутреннюю часть марсохода для подробного химического анализа.
Фото с Марса: