



|
|
|
|
#1 (ссылка) |
|
Crow indian







Регистрация: 21.02.2009
Возраст: 41
Сообщений: 30,426
Поблагодарил: 398 раз(а)
Поблагодарили 6046 раз(а)
Фотоальбомы:
2624 фото
Записей в дневнике: 904
Репутация: 126141
|
Тема: CAN-интерфейс для передачи информации в системе КЛУБ-УCAN-интерфейс для передачи информации в системе КЛУБ-У B.П. БАТРАЕВ, ведущий научный сотрудник ВНИИАС, канд. техн. наук C.В. МАРШОВ, заведующий сектором А.Ю. ЕЛАГИН, главный специалист Сетевой интерфейс CAN (Controller Area Network) разработан в конце 80-х годов (версия 1.0) для нужд автомобилестроения фирмами BOSCH и INTEL при создании бортовых мультипроцессорных систем реального времени. Последняя спецификация BOSCH 2.0А/В дополнила более раннюю версию и была закреплена в 1993 г. международным стандартом ISO 11898-2 (Транспортные средства. Обмен цифровой информацией. Локальная сеть контроллеров CAN для быстрой связи - до 1 Мбит/c) и стандартом ISO 11519 -для низкоскоростных приложений [1]. В настоящее время CAN-протокол является достаточно универсальной основой для передачи данных и используется не только в области автомобилестроения, но и для других видов транспорта, информационно-измерительных сетей, распределенных промышленных систем автоматизации и телемеханики. Упомянутые документы описывают лишь два самых нижних уровня эталонной семиуровневой модели взаимосвязи открытых систем OSI/lSO - физический и канальный. Они являются логическим развитием многоточечного трехпроводного интерфейса RS-485 на основе сигнальной дифференциальной линии полным сопротивлением 120 Ом и определяют: физические параметры среды передачи; процедуры асинхронной последовательной двоичной передачи кодов NRZ; форматы сообщений данных длиной до 8 байт; механизмы обнаружения ошибок. В отечественной нормативно-технической литературе нет полноценных эквивалентов зарубежной документации по элементной базе и CAN-протоколам. Поэтому, как правило, разработчики пользуются либо собственными версиями переводов отдельных разделов из нужных стандартов, либо отрывочными сведениями из описаний, которые прилагаются к покупным техническим средствам, либо справочными данными, например, интернет-сайта www.alldatasheet.com [1-3]. В результате на последующих этапах эксплуатации, расширения или модернизации сети возможна ситуация, когда придется не только корректировать принятые технические решения, но и реализовать новые, требующие дополнительных затрат. В этой связи важно выяснить ограничения на количество оконечных устройств оборудования сети, вопросы обеспечения максимальных скоростей передачи данных при заданной протяженности линий связи, принципы выбора типа кабеля связи и методов защиты от внешних и системных помех. На железнодорожном транспорте России CAN-интерфейс впервые был применен в системе КЛУБ-У (КЛУБ-УП), как вариант мобильного решения локальной сети связи локомотивных приборов безопасности. Рассмотрим условия организации CAN-интерфейса применительно к КЛУБ-У, и дополнительные требования к кабельной сети для обеспечения заданного темпа обмена и предельной скорости передачи при максимальной длине соединительных линий. Актуальность последней задачи объясняется универсальным подходом отделения автоматики и автоматической локомотивной сигнализации (А и АЛС) ВНИИАС к сетевым решениям как для подвижного состава, так и для путевого оборудования автоблокировки АБТЦ-М. 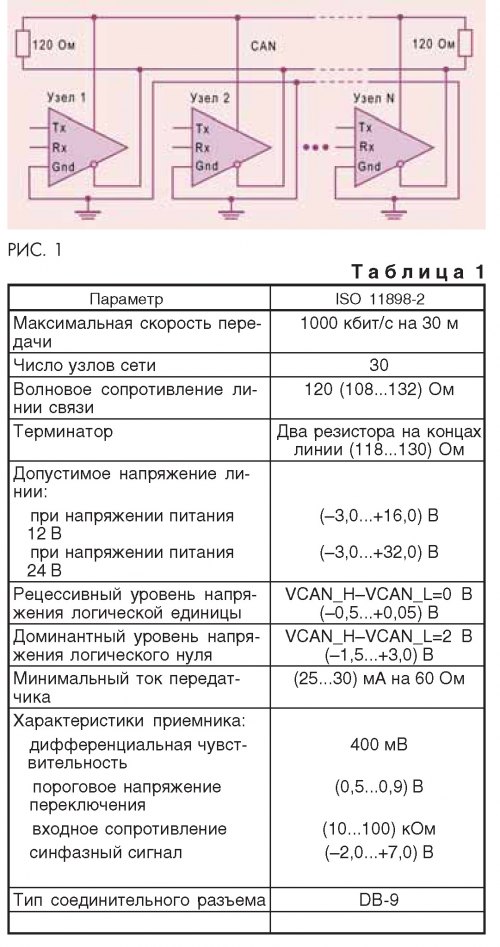 Обобщенная схема соединения устройств с проводной CAN-шиной приведена на рис. 1. В зависимости от стандарта в ней может быть до трех проводов: два сигнальных и один общий. Последний обычно служит для выравнивания потенциалов отдельных узлов, чтобы повысить помехозащищенность при воздействии синфазной помехи. Типовые уровни сигналов шины и основные характеристики скоростного стандарта ISO 11898-2 приведены в табл. 1. Топология сети аппаратуры КЛУБ-У в соответствии со стандартом близка к линейной структуре, но при этом CAN-шина содержит лишь два сигнальных провода из-за особенностей принятой схемы питания блоков. Скоростные приемопередатчики РСА82С250 узлов гальванически развязаны не только от CAN-контроллеров SAE81C91 своих блоков, но и от общих цепей заземления. Анализ помехоустойчивости такой схемы достаточно сложен и выходит за рамки этой статьи. Отметим лишь, что в данном случае шина работает в режиме взвешенной токовой петли, а уровень допустимой синфазной помехи составляет ±7 В и определяется разностью потенциалов, разнесенных вдоль шины приемопередатчиков, асимметрией их выходных сигналов, степенью экранирования самих блоков и др. Схемы выравнивания потенциала, в том числе с использованием не только общей цепи специальных проводов, но и экранов или защитного заземления, подробно описаны в [4, 5]. Для организации CAN-шины сети связи между распределенными по локомотиву блоками оборудования КЛУБ-У выбраны симметричные проводные цепи. В качестве таких цепей используются кабели с экранированными витыми парами производства Ижевского радиозавода (чертеж 36991-758-00) с разъемами типа СНЦ23-10/22В(22Р)-6-6-В. Выбор сделан с учетом того, что кабели на витых парах существенно дешевле, легче и проще коаксиальных. В них ниже уровни потерь сигнала при передаче на высоких частотах и выше защищенность при воздействии внешних электромагнитных помех. В типовых проектах оборудования КЛУБ-У суммарная длина CAN-кабелей составляет 50...60 м при 20 узлах и возможно последующее расширение сети. Очевидно, что тип кабеля, качество его изготовления, соответствие первичных и вторичных параметров нормам, а также топология прокладки будут во многом определять предельные возможности и характеристики шины. От данных показателей зависит число соединяемых блоков, скорость обмена информацией и степень защищенности от внешних электромагнитных воздействий. Наиболее полно перечисленные вопросы были проработаны для стационарных телекоммуникационных сетей зданий и офисов в рамках обязательных понятий структурированной кабельной системы (СКС) и закреплены близкими между собой стандартами [6, 7], некоторые существенные отличия которых приведены в табл. 2. Из-за отсутствия аналогов для мобильных приложений в большинстве случаев приходится ориентироваться на эти же стандарты, но с учетом особенностей национальных требований к монтажу, эксплуатации и администрированию кабельной сети. 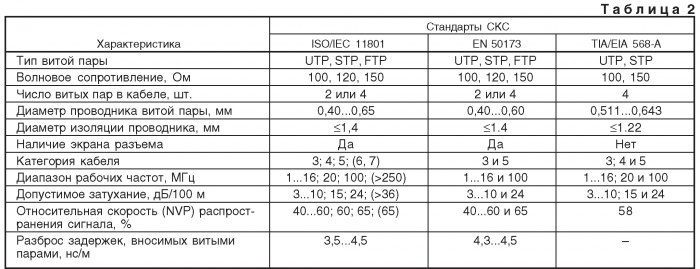 Следует отметить, что значительная часть отечественных СКС построены в соответствии с требованиями близких к американскому стандартуTlA/EIA 568-А, который допускает использование кабелей как из неэкранированных витых пар (UTP) с волновым сопротивлением 100 Ом ±15 %, так и из экранированных (STP, FTP) с сопротивлением 150 Ом ±15 %. В нашем случае это расширяет диапазон нагрузочных сопротивлений реальной CAN-шины в сторону меньших значений в зависимости от типа и категории кабеля или требований соответствия кабельной сети тому или иному действующему стандарту. Некоторые сведения о характеристиках современных кабелей отечественного и зарубежного производства можно получить с информационных сайтов: www.spcable.ru,www.rucable.ru и www.teldor.com, www.belden.com. 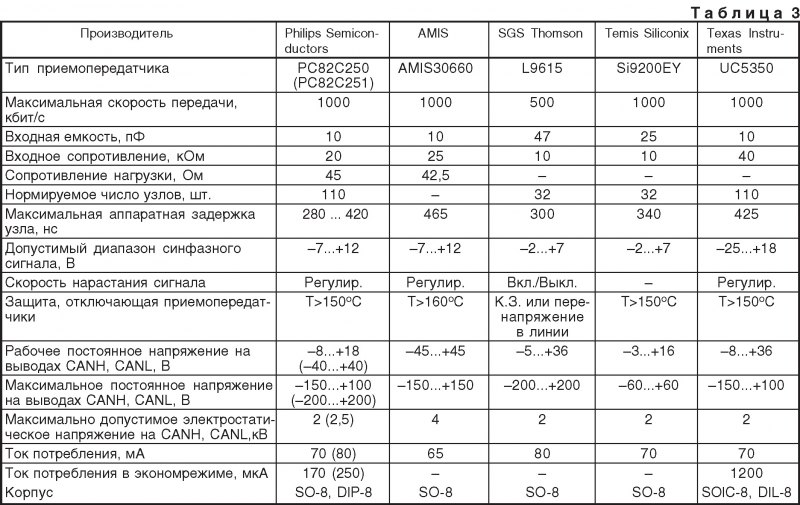 Несмотря на ряд замечаний к кабелям Ижевского радиозавода, в ходе испытаний, было установлено, что основные параметры экранированных витых пар этих кабелей при волновом сопротивлении 100 Ом приближаются к требованиям TIA/EIA 568-A, а по показателю NVP% - скорости распространения сигнала относительно скорости света (с=3108 м/c) - даже несколько лучше норм европейского стандарта En 50173, установленных CENELEC. Временная задержка в линии в зависимости от ее длины может быть определена по выражению:  где tp=КОРЕНЬ(L0C0) - собственное время распространения сигнала для линии единичной длины; L0C0 - погонные индуктивность и емкость витой пары. Установим общие соотношения, позволяющие определить число узлов, длину и допустимую скорость передачи сети. Полагая, что передатчик данных первого узла и приемники остальных узлов размещены в противоположных концах шины по схеме (см. рис. 1), предельное число подключаемых узлов и максимальную длину сигнальной линии определим через величину общего сопротивления элементов схемы и заданных потерь за счет активного сопротивления проводов  где Rm - активное сопротивление терминаторов, включенных по концам линии; Rпр- активное сопротивление проводов линии; Rвх - входное дифференциальное сопротивление приемника узла; N - число узлов на линии. Нагрузочная способность выходного каскада передатчика узла определяется ресурсом конкретной микросхемы и характеризуется величиной минимального сопротивления нагрузки Rмин, которая является справочным параметром. Принимая условия Rмин <= Rобщ и Rпр=0, предельное число подключаемых узлов можно определить из неравенства  Заметим, что если сведения о минимальном сопротивлении нагрузки передатчика отсутствуют, то ее точечную оценку можно найти также с помощью этого неравенства исходя из нормируемого числа узлов при Rm=120 Ом. Рассуждая аналогично, можно показать, что напряжения в начале и конце линии по схеме (см. рис. 1) будут определяться соотношением  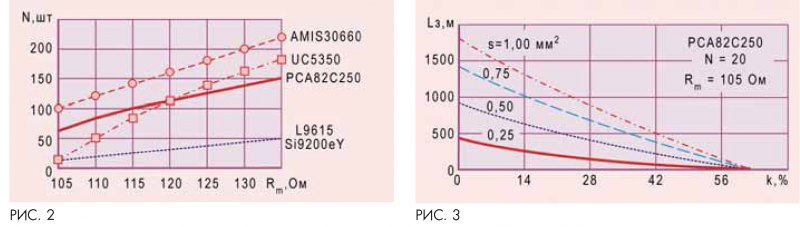 Введем понятие коэффициента запаса, характеризующее устойчивость переключения приемника при доминантном уровне напряжения на его входе, когда обеспечивается заданное превышение порогового напряжения переключения при формировании логического нуля в CAN-шине K=Un/Uпорог>=1 (5) Тогда предельная длина двухпроводной линии связи по критерию допустимого ослабления сигнала по постоянному току будет равна  где s, р - сечение и удельная проводимость материала проводов линии. Графики расчетных значений по (3) и (6) при волновом сопротивлении линии 100 Ом и минимальной величине уровня доминантного напряжения для некоторых типов скоростных приемопередатчиков наиболее известных производителей из табл. 3 приведены на рис. 2 и 3. Анализ зависимостей показывает, что выбор типа приемопередатчика в этом случае ограничен, особенно при числе узлов N>20. При этом длина согласованной линии не превышает 1000-1200 м в пределах требований к диаметрам проводов кабелей всех известных стандартов СКС и узлов с приемопередатчиками РСА82С250. Увеличение коэффициента запаса на каждые 10 % относительно порогового напряжения переключения и порог=0,9 В приводит лишь к пропорциональному сокращению длины линии в среднем на 25...30 %, которое может быть компенсировано только за счет увеличения сечения жил проводов витой пары. Полученные оценки соответствуют условиям работы CAN-шины с малыми скоростями передачи и типовыми электрическими режимами приемопередатчиков, которые не требуют специальной технологической регулировки и настройки. В одном из ближайших номеров журнала будут рассмотрены временные характеристики работы CAN-шины и основные соотношения, устанавливающие жесткую зависимость длины линии связи от параметров приемопередатчиков и задаваемой предельной скорости передачи. ЛИТЕРАТУРА 1. Roal vehicles - Interchange of digital information -Controller area network (CAN) for hihg-speed communication, ISO 11898, 1993. 2. Data Sheet PCA82C250. CAN controller interface. Philips, 2000-Jan.13. 3. Л а п и н А. Новое поколение изделий для управляемого электропривода компании ТЕХ.//Электроника: Наука, технология, Бизнес, 2005, № 7, с . 56-59. 4. О т т Г. В. Методы подавления шумов и помех в электронных системах: Пер. с англ./Под ред. М.В. Гальперина //М.: Мир, 1979, с. 317. 5. Л о к о т к о в А. Интерфейсы последовательной передачи данных. Стандарты EIA RS-422A/RS-485//Современные технологии автоматизации, 1997, № 3, с. 110-119. 6. С е м е н о в А. Б., С т р и ж а к о в С. К., С ун ч ел ей И. Р. Структурированные кабельные системы //М.: Компания АйТи; ДМК Пресс, 2004-640+16 с. 7. П а р ф е н о в Ю. А., М и р о ш н и к о в Д. Г. Цифровые сети доступа. Медные кабели и оборудование. Эко-Трендз, 2005.-288 с. Последний раз редактировалось Admin; 22.02.2024 в 07:59. |
|
|
Цитировать 14 |
|
|
#2 (ссылка) |
|
Робот

Регистрация: 05.05.2009
Сообщений: 1,496
Поблагодарил: 0 раз(а)
Поблагодарили 82 раз(а)
Фотоальбомы:
не добавлял
Репутация: 0
|
Тема: Тема перенесена |
|
|
Цитировать 0 |
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| [Статья] Безопасная беспроводная передача данных в системе МПЦ | Admin | Ж/д статьи | 0 | 15.05.2011 07:40 |
| передача дискретной информации | miitovets | Курсовое и дипломное проектирование | 2 | 15.03.2011 11:35 |
| Регистратор информации КТСМ-01Д | Андрей13 | КТСМ / ПОНАБ | 3 | 28.06.2010 03:08 |
| =Техн. решения= Унификация съема информации с релейных систем - 410518-ТР | СЦБист | Диспетчерские централизации и диспетчерский контроль | 1 | 18.05.2010 19:12 |
| Средства отображения информации в устройствах ЖАТ | СЦБист | Рефераты | 0 | 21.06.2009 07:11 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , , , , , , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|








