



|
|
|
|
#1 (ссылка) |
|
Crow indian







Регистрация: 21.02.2009
Возраст: 41
Сообщений: 30,426
Поблагодарил: 398 раз(а)
Поблагодарили 6046 раз(а)
Фотоальбомы:
2624 фото
Записей в дневнике: 904
Репутация: 126141
|
Тема: [08-2024] Структура автономной интегрированной высокоточной системы позиционированияСтруктура автономной интегрированной высокоточной системы позиционирования Охотников Андрей Леонидович, АО «Научно-исследовательский и проектно-конструкторский институт информатизации, автоматизации и связи на железнодорожном транспорте», заместитель начальника Департамента информационных технологий - начальник отдела стратегического развития, Москва, Россия СОКОЛОВ Сергей Викторович, Московский технический университет связи и информатики (МТУСИ), заведующий кафедрой «Информатика и вычислительная техника», профессор, д-р техн, наук, Москва, Россия Ключевые слова: транспортный объект, опорный объект, цифровая модель пути, бортовая система технического зрения, колесная одометрия, оптическая одометрия Аннотация. В статье представлены задачи и характеристики высокоточного позиционирования подвижных транспортных объектов, в частности, беспилотных (автономных) локомотивов. Указаны кинематические параметры, характеризующие движение транспортных объектов, и перечень опорных объектов инфраструктуры, относительно которых двигается поезд. Предложено рассматривать высокоточную систему позиционирования автономного поезда как интегрированную систему, обеспечивающую комплексирование данных от различных навигационных датчиков, датчиков системы технического зрения и цифровой модели пути. Решению задачи высокоточного позиционирования подвижных объектов, в частности железнодорожных, посвящено достаточно большое количество работ [1-7]. Некоторые из них базируются на использовании спутниковых измерений [4, 5], другие - на добавлении к штатной навигационной аппаратуре датчиков систем технического зрения (СТЗ) [6] и инерциальных навигационных систем (ИНС) различного исполнения [7]. При автоматическом управлении подвижным объектом особое значение имеют данные о точном позиционировании транспортного объекта (ТО), которые позволяют реализовать принцип координатного управления. В этом случае позиционирование подразумевает определение непосредственно не только координат, но и наличие множества других кинематических параметров, характеризующих движение ТО. К таким параметрам относятся скорость, угловая скорость, ускорение, углы ориентации относительно выбранной системы координат, направление движения. При позиционировании железнодорожного ТО дополнительно определяются номер пути, рельсовой цепи, опорные объекты инфраструктуры относительно ТО (светофоры, стрелочные переводы, опоры контактной сети, изостыки, знаки, границы платформ и др.) и расстояния до этих объектов. Можно выделить текущие ограничения при позиционировании ТО и обеспечении требуемого уровня безопасности движения. Сюда относятся: недостаточная точность позиционирования локомотива; необходимость ручного ввода номера пути и переключения участка следования; эксплуатация неактуальных электронных карт, в которых имеются многочисленные несоответствия. Они вызваны тем, что из-за отсутствия автоматической актуализации данных системы ЕГИС ТПС такая процедура при появлении изменений в инфраструктуре осуществляется вручную в течение довольно длительного времени. Под высокоточным позиционированием на сегодняшний день понимается, как правило, определение координат ТО не менее, чем с сантиметровой точностью. В рамках стандартной (субметровой) точности, необходимой для управления ТО в автономном режиме, решение прикладных задач с помощью ГНСС обеспечить невозможно [8]. Определим задачи высокоточной системы позиционирования (ВСП), решать которые необходимо с заданной степенью достоверности и точности. Они включают в себя:
В состав датчиков подобной ВСП должны быть включены: навигационная аппаратура потребителей (НАП) ГНСС; датчики пути и скорости (ДПС); инерциальная навигационная система, чаще бесплатформенная (БИНС); датчики систем технического зрения, используемые в визуальной, лидарной и радиолокационной одометрии. В блоке обработки информации от датчиков СТЗ в таком составе наиболее часто используются алгоритмы SLAM (Simultaneous Localization And Mapping) [9] для локализации и построения электронной карты местности с одновременным контролем текущего местоположения и пройденного пути. Важным элементом ВСП является цифровая модель пути (ЦМП) [10], формируемая на базе высокоточных геодезических измерений и содержащая геопространственные данные о путевом развитии и путевой инфраструктуре. 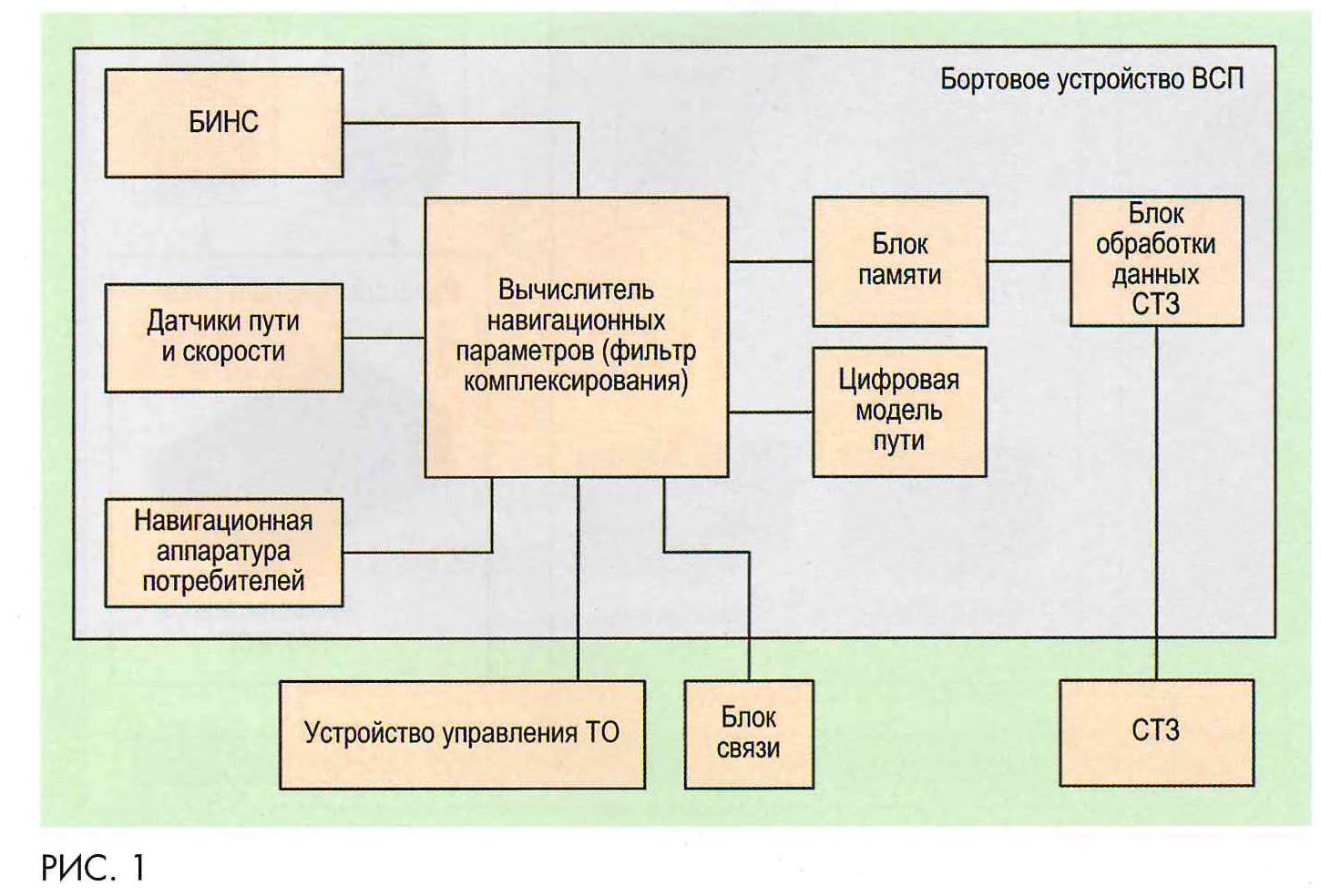 В случае привязки координат ТО к ЦМП, особенно при «абсолютном» доверии к ЦМП, несвоевременная актуализация данных может повлечь недостоверную привязку и неверную подачу информации об опорных объектах инфраструктуры. Неточная информация от ЦМП приведет к ошибочному позиционированию ТО, неверному расчету расстояния до препятствия и возможным авариям. Минимизация рисков может быть достигнута за счет высокой (гарантированной) достоверности данных НАП ГНСС на их соответствие потенциальным характеристикам в различных точных режимах функционирования. Общий состав бортовой интегрированной ВСП представлен на схеме (рис. 1). Важным элементом автономного ТО является СТЗ, в состав которой входят видеокамеры видимого и ИК-диапазонов (тепловизоры), лидары и радары. При использовании алгоритмов SLAM для обработки сенсорных данных можно определять параметры движения ТО с учетом изменения его положения и ориентации относительно опорных объектов инфраструктуры. Соответственно оптическая одометрия, основанная на обработке последовательности данных сенсоров, подобна одометрии на основе инерциальных измерений по составу выходных данных и по накапливающейся погрешности. Достоинством одометрии такого типа является высокая точность измерения параметров ориентации и положения (малая величина случайной погрешности), недостатком - значительные вычислительные ресурсы, необходимые при обработке сенсорных данных, влияние внешних факторов, связанных с погодными условиями и атмосферными возмущениями, а также большое количество нерелевантных данных, образующихся вследствие помех и отраженных сигналов от железнодорожной инфраструктуры. В колесной одометрии источником данных служат датчики пути и скорости [11], выполненные в виде датчиков угла поворота оси колесной пары или на их основе в виде скоростемера/одометра. Достоинство этих устройств заключается в автономности и помехоустойчивости, но при этом может быстро нарастать погрешность измерений. Из-за этого необходимы контроль влияния на измерения юза и буксования, точное знание диаметра бандажа колеса, а также учет прохождения криволинейных траекторий рельсового пути. Современная навигационная аппаратура потребителей, функционирующая на базе навигационных сообщений от ГНСС, позволяет решать большинство задач железнодорожной отрасли, включая управление беспилотными транспортными системами. ВСП ТО строится за счет использования высокоточных режимов абсолютного позиционирования НАП: дифференциального (локального, широкозонного регионального), относительного и кинематики реального времени (RTK - Real-time kinematic). Последний является наиболее перспективным и в настоящее время чаще всего применяется для систем автоматического управления движением поездов. Для беспилотного электропоезда «Ласточка» на МЦК такой режим работы программно-аппаратного комплекса (ПАК) ВСП составляет более 80 %. В то же время наличие помех различной физической природы оказывает существенное влияние на точность функционирования ГНСС. В связи с этим требуется дальнейший анализ оценки возможности достижения целевых показателей ПАК ВСП в части обеспечения требований к точности измерений. К достоинствам НАП ГНСС можно отнести получение полного кинематического вектора (координаты, скорости, направление движения, угловая ориентация) и относительно высокую точность определения координат, скорости и угловой ориентации. К недостаткам - низкую помехоустойчивость к радиопомехам в условиях городской застройки, а также низкий уровень автономности и доверия к выходным данным НАП ГНСС (независимо от режима функционирования). В качестве инерциальных навигационных систем, измеряющих линейные ускорения и угловые скорости ТО относительно инерциальной системы координат, для применения в беспилотном объекте лучше подходят бес-платформенные ИНС (БИНС). В последнее время широкое распространение получили БИНС на базе микроэлектромеханических систем (МЭМС). БИНС обладают такими достоинствами, как автономность, помехоустойчивость, возможность оценивания полного кинематического вектора (при наличии исходного состояния), низкая стоимость. Их существенный недостаток заключается в накоплении погрешности оцениваемых параметров с течением времени, что ограни чивает временной интервал валидности навигационных данных. Для беспилотного ТО величина такого интервала определяется временем его прохождения в местах ограничения использования ГНСС: под мостами, эстакадами, в тоннелях и др. Для позиционирования автономных ТО необходимо использование цифровой модели пути (ЦМП). Она является источником априорной информации о точном путевом развитии железнодорожной инфраструктуры с указанием всех опорных объектов и точной привязкой их к местности. С учетом полученной навигационной информации она описывает множество траекторий движения ТО и используется для получения итоговых результатов оценок его координат и ориентации. Ком-плексирование навигационных параметров и данных ЦМП в фильтре интегрированной ВСП обеспечивает на порядок повышение точности позиционирования с учетом имеющихся погрешностей и пропусков входных данных. Являясь источником координатной информации опорных объектов, ЦМП может использоваться для решения задачи позиционирования ТО (относительно реперных объектов) и вычисления расстояний до этих объектов и препятствий. Состав аппаратной части ВСП представлен на рис. 2. Основное условие создания ЦМП - высокая точность определения координат точек пути и опорных объектов инфраструктуры, которая должна быть значительно выше требуемой точности системы позиционирования в целом. Отметим, что при построении интегрированной ВСП для автономного ТО обязательно учитываются особенности датчиков, используемых в таких системах. К ним относятся: асинхронность входных данных датчиков (разных джиттеров и частот, в общем случае некратных), значительно осложняющая предварительное их временное «выравнивание»; невозможность внесения конструктивных изменений в датчик, что может привести к реализации только централизованной, разомкнутой или слабосвязанной схемы комплексирования; необходимость применения ЦМП, а также контроля валидности данных от датчиков, смены режимов работы ПАК ВСП от наличия сигналов ГНСС. В настоящее время основными задачами по формированию интегрированной ВСП являются: оценка работы НАП ГНСС, БИНС в реальных (сложных) условиях эксплуатации на железной дороге; сбор и анализ массивов данных, на основе которых необходимо провести доработку встроенных алгоритмов и программного обеспечения; количественная оценка выбранных метрик качества функционирования ВСП. Подводя итог, следует подчеркнуть, что технология позиционирования является ключом к решению множества технологических задач железнодорожной отрасли, и высокоточное позиционирование открывает для железных дорог дополнительные возможности. При этом позиционирование ТО неразрывно связано с электронными картами (цифровой модели пути), что в конечном счете должно привести к созданию цифрового двойника железнодорожной инфраструктуры. Появляются новые задачи, связанные с подавлением и/или искажением спутниковых навигационных сигналов, которые необходимо решать путем применения инерциальных навигационных систем и визуальной одометрии. Технологии позиционирования на железнодорожном транспорте активно развиваются во всем мире, и ОАО «РЖД» находится на лидирующих позициях. Предложенная структура бортовой интегрированной ВСП позволяет решать поставленные задачи с помощью интеграции автономной бесплатформенной инерциальной навигационной системы, спутниковой навигационной системы, датчиков СТЗ и ЦМП и обеспечить повышение точности формирования навигационных параметров. 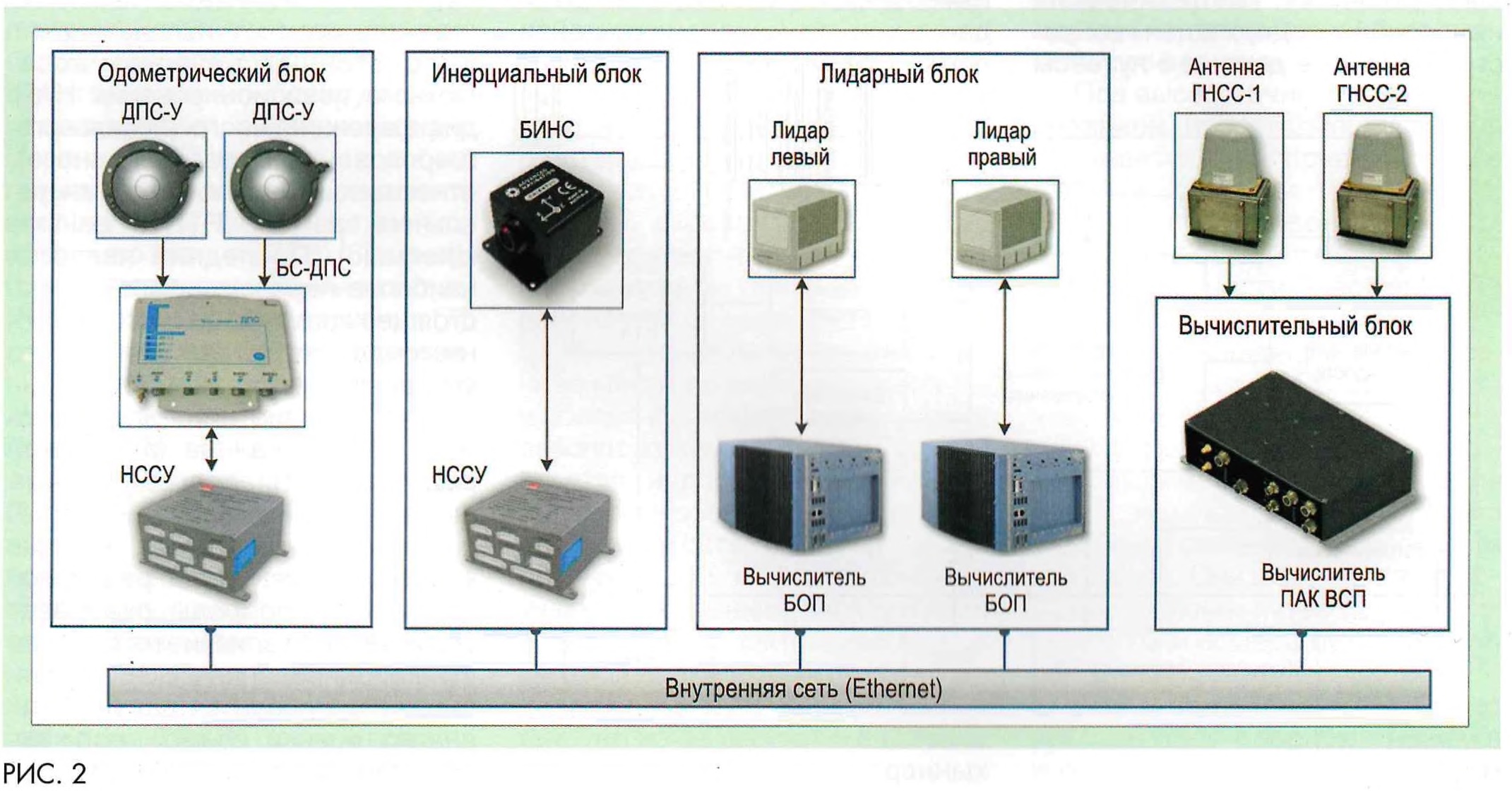 Ключевое преимущество применения высокоточных систем позиционирования заключается в возможности улучшения условий труда машинистов и уменьшении влияния «человеческого фактора» при обеспечении безопасности движения. Например, система достоверно определяет номер пути следования поезда и исключает ручной ввод машинистом номера пути на всех участках эксплуатации подвижного состава. СПИСОК источников1. Уманский В.И. Модели синтеза высокоточных систем позиционирования локомотива для решения задач тесной и глубокой интеграции бесплатформенных инерциальных и спутниковых навигационных систем // Системы высокой доступности. 2011. Т. 7, № 3. С. 61-76. EDN: OKAYLP. 2. Попов П.А. Применение передовых технологий для работы в автоматическом режиме на МЦК // Железнодорожный транспорт. 2020. № 11. С. 17-21. EDN: LHYOFG. 3. Соколов С.В., Чуб Е.Г. Робастное стохастическое оценивание параметров состояния беспилотных объектов в условиях неопределенности // Наука и образование транспорту. 2023. № 1. С. 233-236. EDN: RGZYQU. 4. 0 повышении точности GPS-компаса для малоразмерных объектов / Г.И. Емельянцев, А.П. Степанов, Б.А. Блажнов, И.В. Семенов//Гироскопия и навигация. 2015. № 1 (88). С. 18-28. DOI: 10.17285/0869-7035.2015.23.1.018-029. EDN: TQLDOB. 5. Шахин Э.М. Математический анализ фазовых погрешностей в схеме слежения приемника GPS при помехах разного рода И Гироскопия и навигация. 2018. Т. 26, № 3 (102). С. 40-53. DOI: 10.17285/08697035.2018.26.3.040-053. EDN: SIULYP. 6. Патент № 2509021 РФ, B61L 25/02. Устройство и способ для создания сигнала местоположения / А. Пу-херт; патентообладатель Сименс Ак-циенгезелльшафт. № 2011100827/11; заявл. 03.06.2009; опубл. 10.03.2014; Бюл. № 7. EDN: RYTJXL. 7. Карташов О.О. Анализ проблем применения инерциальных систем навигации на железнодорожном транспорте // Транспорт-2015 : труды международной научно-практической конференции. Ч. 2. Ростов-на-Дону: Ростовский государственный университет путей сообщения, 2015. С. 55-56. EDN: VDBMHZ. 8. Иванов В.Ф., Попов П.А. Высокоточная система позиционирования железнодорожного подвижного состава// Труды АО «НИИАС» : сборник статей. Вып. 11, т. 2. М.: Типография АО «Т 8 Издательские Технологии», 2021. С. 179-189. EDN: KCAWSO. 9. Комбинированный способ решения навигационной задачи с применением системы технического зрения / А.В. Савкин, П.А. Колганов, Д.А. Антонов и др. // Приборы. 2023. Ns 10 (280). С. 19-30. EDN: SVBHWS. 10. Якушев Д.А. Цифровая модель пути для беспилотного управления движением поездов // Автоматика, связь, информатика. 2021. № 4. С. 35-39. DOI: 10.34649/АТ.2021.4.4.005. EDN: PMBBLM. 11. Патент № 2041100 РФ, B61L 25/02. Устройство для регистрации параметров движения поезда / В.Р. Мирный, М.А. Певзнер, М.Л. Антокольский; заявитель ПКБ Главного управления локомотивного хозяйства МПС. № 5023388/11; заявл. 22.01.1992; опубл. 09.08.1995. EDN: VVWNCN. |
|
|
Цитировать 14 |
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| [02-2024] Перспективы развития методов позиционирования поездов на основе волоконно-оптических измерений | Admin | xx3 | 0 | 08.05.2024 07:25 |
| Высокоточная система позиционирования железнодорожного подвижного состава | Admin | Ж/д статьи | 0 | 25.04.2024 07:16 |
| [11-2022] Высокоточные цифровые карты и комплексы позиционирования | Admin | xx3 | 0 | 24.12.2022 07:50 |
| Создание и эксплуатация высокоточной координатной системы ОАО «РЖД». Временный регламент | Admin | Документация | 0 | 20.02.2013 12:14 |
| Структурная схема автономной системы электроснабжения | malinka67 | Курсовое и дипломное проектирование | 0 | 06.01.2012 20:47 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|










