



|
|
|
|
#1 (ссылка) |
|
Crow indian







Регистрация: 21.02.2009
Возраст: 41
Сообщений: 30,426
Поблагодарил: 398 раз(а)
Поблагодарили 6046 раз(а)
Фотоальбомы:
2624 фото
Записей в дневнике: 904
Репутация: 126141
|
Тема: [07-2024] Комбинированная схема закрепления подвижного составаКомбинированная схема закрепления подвижного состава ХАТЛАМАДЖИЯН Агоп Ервандович, АО «Научно-исследовательский и проектно-конструкторский институт информатизации, автоматизации и связи на железнодорожном транспорте», заместитель генерального директора, доцент, канд. техн, наук, Москва, Россия ОЛЬГЕЙЗЕР Иван Александрович, АО «Научно-исследовательский и проектно-конструкторский институт информатизации, автоматизации и связи на железнодорожном транспорте», первый заместитель директора Ростовского филиала, доцент кафедры ВТ и АСУ Ростовского Государственного университета путей сообщения РГУПС, канд. техн, наук, г. Ростов-на-Дону, Россия Cоколов Владислав Николаевич, АО «Научно-исследовательский и проектно-конструкторский институт информатизации, автоматизации и связи на железнодорожном транспорте», главный инженер Ростовского филиала, канд. техн, наук, г. Ростов-на-Дону, Россия КОРНИЕНКО Константин Ильич, АО «Научно-исследовательский и проектно-конструкторский институт информатизации, автоматизации и связи на железнодорожном транспорте», Центр автоматизации технологических процессов, ведущий научный сотрудник, канд. техн, наук, Москва, Россия Ключевые слова: сортировочная станция, закрепление подвижного состава, цифровая железнодорожная станция, Комплекс ПРИЦЕЛ, ПАК КУЗС, УТС-380, ДУЗС Аннотация. В мае на станции Челябинск-Главный проведены предварительные испытания разработки АО «НИИАС» - комбинированной схемы закрепления подвижного состава. Уникальная технология совмещения устройств закрепления, взаимодействующих с колесом подвижного состава на различных принципах, позволяет сократить капитальные затраты на внедрение решения более чем в 2 раза. Преимуществом технологии является возможность ее использования на путях с большими уклонами до 2,5 %о. При этом количество устройств, а, следовательно, и стоимость решения, не растет с увеличением уклона. Разработка является частью проекта «Цифровая железнодорожная станция». Первой станцией, где будет применяться комбинированная схема, станет Челябинск-Главный. По итогам проведенных испытаний принято решение о работоспособности технологии и необходимости проведения эксплуатационных испытаний. Массовое внедрение разработки на сети планируется начать с 2025 г. Согласно приложению № 2 к ПТЭ [1] «...Железнодорожный подвижной состав, оставляемый на станционных железнодорожных путях, а также на железнодорожных путях необщего пользования без локомотива, закрепляется от самопроизвольного движения тормозными башмаками, стояночными тормозами или стационар ными средствами закрепления до отцепки локомотива ...». На сегодняшний день основными устройствами закрепления подвижного состава на приемо-отправочных путях станций являются тормозные башмаки. Впервые они появились около 150 лет назад и за этот период не претерпели значительных измене ний [2-3]. У тормозных башмаков есть следующие значительные недостатки:
Несмотря на достаточную простоту конструкции, у упоров типа УТС-380 имеются существенные недостатки. К ним можно отнести:
За последние 10 лет появилось несколько новых типов устройств закрепления [4]: домкратовидные устройства закрепления подвижного состава, балочные устройства закрепления, тяжелые упоры. В 2016 г. была разработана и запатентована первая система закрепления подвижного состава с использованием домкратовидных устройств. Она основывалась на импортных устройствах. В рамках импортозамещения специалисты АО «ОКБ «Электроавтоматика» им. П.А. Ефимова» разработали отечественные домкратовидные устройства закрепления составов (ДУЗС) (рис. 2). В 2021 г. данные устройства стали применяться на инфраструктуре ОАО «РЖД». Преимуществами ДУЗС являются полная автономность и энергонезависимость, высокая прочность изделия и надежная защита от воздействия внешних агрессивных факторов окружающей среды, а также использование при изготовлении отечественных материалов. Недостаток ДУЗС - это их большое количество, необходимое для закрепления подвижных единиц. Анализ специалистов АО «НИИАС» показал, что для закрепления состава весом 5 тыс. т на уклоне в 1 %о требуется порядка 150 ДУЗС, увеличение уклона и веса приводит к значительному увеличению требуемых устройств. Концепцией «Цифровая железнодорожная станция» [5] предусматривается полная автоматизация технологических операций, в том числе и операций по закреплению и раскреплению составов на приемо-отправочных путях станций. Для закрепления подвижного состава в автоматическом режиме необходимо решить следующие задачи: автоматическое позиционирование подвижного состава в зоне закрепления и автоматическое управление устройствами закрепления. Для обеспечения возможности полной автоматизации процесса закрепления подвижного состава, а также оптимизации количества устройств закрепления при безусловном соблюдении безопасности специалистами АО «НИИАС» разработана комбинированная схема закрепления подвижного состава. Принцип работы этой схемы заключается в совместном применении различных устройств закрепления, взаимодействующих с колесом подвижного состава на различных принципах. Тем самым достигается возможность компенсации недостатков применения каждого из типов устройств по отдельности при максимальной оптимизации их общего количества. Комбинированная схема закрепления подвижного состава, состоящая из домкратовидных устройств закрепления ДУЗС и упора УТС-380 в рамках разработки и испытаний Модуля № 15 ЦЖС, установлена на 5 пути парка Г станции Челябинск-Главный (рис. 3, 4). В мае текущего года на основании телеграммы ОАО «РЖД» на станции Челябинск-Главный согласно разработанной программе и методике испытаний проводились предварительные испытания комбинированной схемы закрепления с использованием тормозоиспытательного вагона и груженого состава весом 6,3 тыс. т. Первая группа испытаний была направлена на определение величины предельных значений усилий, действующих на устройства закрепления. Это было необходимо для оценки максимальной величины горизонтального воздействия на УТС-380 и вагон. Испытания проводились согласно схеме размещения, представленной на рис. 5. Вагон весом 90 т накатывался на УТС-380, далее машинист локомотива включал режим тяги и тянул вагон в сторону, противоположную закреплению. Персонал тормозоиспытательного вагона по приборам фиксировал усилие, приложенное к автосцепке-динамометру. По программе и методике испытаний они должны были прекращаться при возникновении неисправности оборудования упоров или при достижении горизонтального усилия более 20 тс. 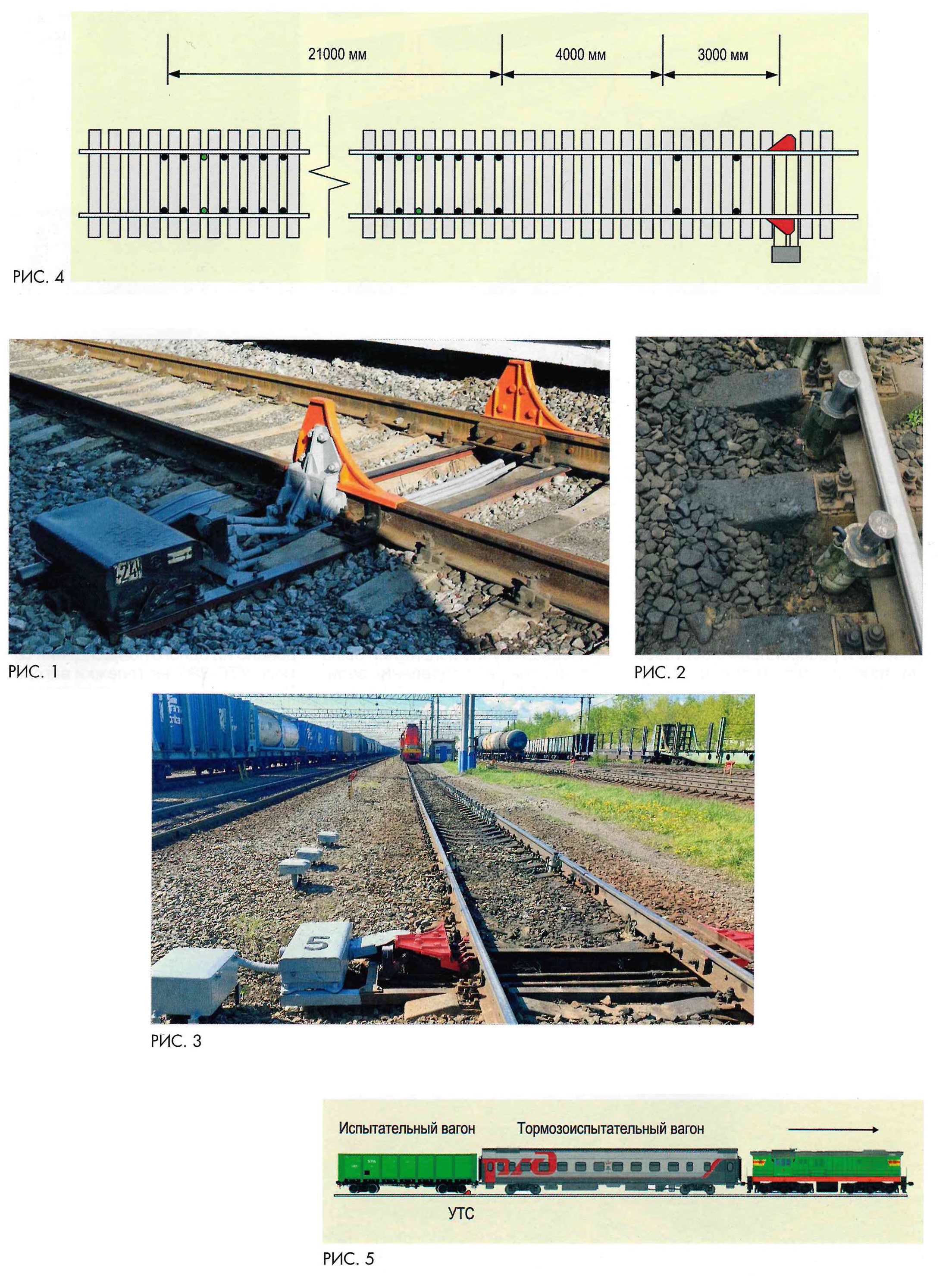 Испытания проводились несколько раз. Все эксперименты останавливались при значении горизонтального усилия больше 20 тс. Среднее значение удерживающего усилия, зафиксированного при испытаниях, составило 40 тс, что в два раза больше указанного в руководстве по эксплуатации УТС-380 для порожних вагонов. Это испытание позволило экспериментально подтвердить, что УТС-380 имеет большой запас прочности при кратковременных воздействиях. Не было зафиксировано ни одного повреждения самого УТС-380, ни тележки вагона. Подъем кузова испытательного вагона также не был зафиксирован. Таким образом, можно сделать вывод, что при кратковременных нагрузках на упор, превышающих расчетны, например, резких порывах ветра, возникновение опасных ситуаций исключается. Вторая группа испытаний была связана с определением влияния динамического воздействия на УТС-380. Исходя из Руководства по эксплуатации на УТС-380, расстояние от полоза упора до колеса должно быть не более 50 см. Это связано с высокой вероятностью повреждения упора или вагона при динамическом воздействии наезжающей колесной пары на упор после остановки и отпуска тормозов. При закреплении только на упор без использования дополнительных тормозных башмаков в процессе эксплуатации УТС-380 были зафиксированы случаи, когда происходит сход либо повреждение крайнего вагона. Одной из главных задач разработанной комбинированной схемы закрепления подвижного состава является компенсация возможного динамического воздействия состава на упор при отпуске тормозов. При остановке состава на ДУЗС после отпуска тормозов под действием силы тяжести состав начинает движение в сторону УТС-380. За счет погашения энергии при преодолении сопротивления ДУЗС импульс удара состава в УТС-380 не должен превышать 15-17 тс, что позволит исключить вероятность опасной ситуации при динамических воздействиях на упор. Для определения динамических воздействий применялся состав из 66 вагонов массой 6,3 тыс. т с первым вагоном весом 90 т. Для целей испытания состав закреплялся с хвоста. Общая схема расстановки локомотива и вагонов представлена на рис. 6. Первое испытание было направлено на определение максимальной длины растяжения состава. Испытание проводилось без закрепления подвижного состава и без тормозоиспытательного вагона. Машинист производил осаживание в сторону УТС-380, в результате чего автосцепки сжимались, затем остановку с включением тормозов. На последнюю колесную пару и на рельс были нанесены отметки. Далее машинист выпускал воздух из тормозной магистрали. При этом локомотив закреплялся стояночным тормозом, вследствие чего его движения не происходило. Под воздействием силы тяжести вагоны пришли в движение, и произошло растяжение автосцепок. После остановки состава было замерено расстояние между последней колесной парой и отметкой, сделанной на рельсе. Последняя колесная пара состава сместилась на расстояние 525 см, в среднем ход одной автосцепки составил около 4 см. На следующем этапе оценивалась сила сжимающего воздействия на автосцепку-динамометр при скатывании состава. К по следнему вагону был прицеплен тормозоиспытательный вагон, закрепленный с помощью тормозных башмаков. Результаты испытания показали, что состав при отпуске тормозов воздействует на автосцепку-динамометр с усилием, равным 15 тс, что меньше допустимого для УТС-380. 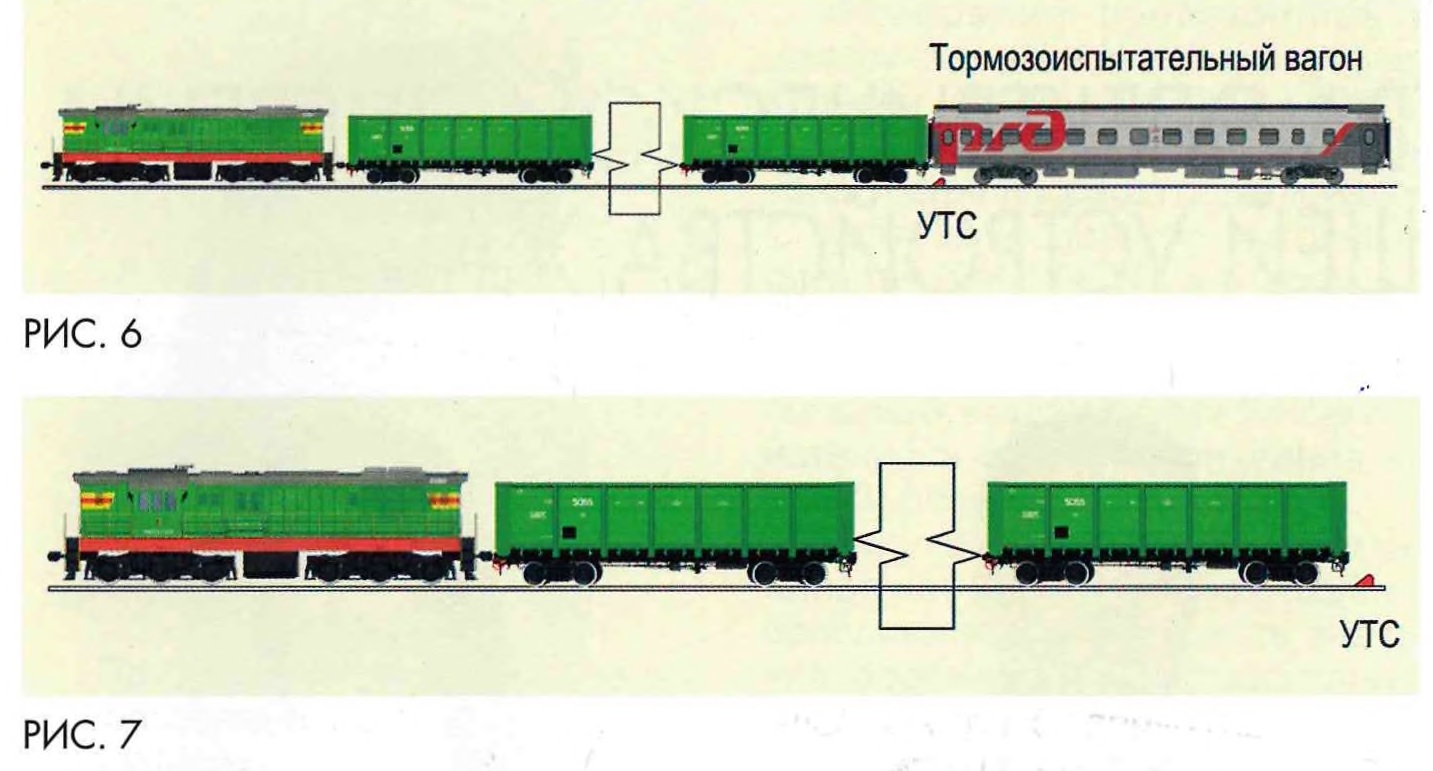 Последней группой проводимых испытаний являлось закрепление подвижного состава с помощью комбинированной схемы (рис. 7). Для этого сначала закрепляемый состав установили на расстоянии 109 см от колодок УТС-380, затем колодки перевели в рабочее состояние. Такое расположение состава обеспечило закрепление 10 колес состава на ДУЗС. Исходя из веса состава (6,3 тыс. т) и уклона (2,2 %о) был сделан вывод, что только ДУЗС состав не смогут удержать, он придет в движение и накатится на колодки УТС-380. После осаживания состава и отпуска тормозов состав пришел в движение и накатился на УТС-380. За счет энергии, гасимой на ДУЗС, накат состава на упор был с минимальной скоростью, что обеспечило безопасность закрепления состава. Крайним экспериментом осуществлялось закрепление состава из 10 вагонов весом 1 тыс. т. В этом эксперименте состав не сдвинулся с места, оставшись закрепленным только на ДУЗС, что подтвердило эффективность работы домкратовидных устройств закрепления. Проведенные предварительные испытания показали возможность применения комбинированной схемы закрепления УТС-380 и ДУЗС. ДУЗС используются для снижения возможного динамического импульса, который может возникнуть при отпуске тормозов, вследствие чего накатывание вагона на упор осуществляется безопасно. В выводах комиссия подчеркнула, что необходимо проводить эксплуатационные испытания данной схемы для закрепления различных комбинаций типа и веса подвижного состава. В частности, перед вводом в опытную эксплуатацию необходимо провести испытания по оценке закрепления порожнего состава. Опытные испытания комбинированной схемы планируется проводить совместно с Комплексом ПРИЦЕЛ и ПАК КУЗС для проверки полной автоматизации процесса закрепления подвижного состава. Внедрение данной разработки на сети дорог ОАО «РЖД» планируется начать с 2025 г. Она позволит обеспечить автоматизацию процесса закрепления при использовании минимального количества напольных устройств с одновременным повышением безопасности. СПИСОК источников1. Правила технической эксплуатации железных дорог Российской Федерации:утв. Приказом Минтранса России от 23 июня 2022 г. № 250. Доступ через СПС «КонсультантПлюс». 2. Железнодорожные тормозные горочные башмаки : история и перспективы/С.А. Сапожников, Д.П. Марков, Ж.Г. Воробьёва, И.Н. Воронин, В.И. Маршев, М.В. Забавина//Вестник Научно-исследовательского института железнодорожного транспорта. 2014. № 5. С. 38-43. 3. О закреплении составов стояночными тормозными башмаками / Д.П. Марков, С.А. Сапожников, В.И. Маршев, И.Н. Воронин, М.В. Забавина //Железнодорожный транспорт. 2015. № 12. С. 28-30. 4. Автоматизация закрепления подвижного состава на путях станций /А.И. Долгий, А.Г. Сахаров, А.Е. Хатла-маджиян, И.А. Ольгейзер, К.И. Корниенко // Железнодорожный транспорт. 2023. № 10. С. 34-39. 5. Андреев В.Е., Долгий А.И., Кудю-кин В.В., Хатламаджиян А.Е., Гришаев С.Ю., Ольгейзер И.А. Цифровая железнодорожная станция - от концепции к реальному внедрению // Автоматика, связь, информатика. 2023. № 9. С. 2-6. DOI: 10.34649/АТ.2023.9.9.001 6. Автоматизация процесса закрепления подвижного состава / К.И. Корниенко, С.В. Богданович, И.А. Ольгейзер, В.Н. Соколов // Инженерный вестник Дона. 2023. № 11(107). С. 760-776. |
|
|
Цитировать 14 |
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| Визуализированная памятка по порядку и нормам закрепления подвижного состава (введена телеграммой от 30.05.2024 № ИСХ-7728/ОКТД) | Admin | Октябрьская железная дорога | 0 | 02.09.2024 06:35 |
| [03-2023] Автоматизация позиционирования подвижного состава в системах закрепления на железнодорожных станциях | Admin | xx3 | 0 | 15.12.2023 05:49 |
| =Самоучитель ДСП= Основные правила закрепления подвижного состава. Неисправности тормозных башмаков | Admin | Самоучитель ДСП | 2 | 04.12.2016 16:37 |
| =Приказ= № 136 от 22.03.14 г. - О запрете покидать локомотивным бригадам локомотив при отсутствии смены без закрепления подвижного состава | Admin | Документы Дирекции тяги ОАО "РЖД" | 0 | 30.03.2014 07:23 |
| Упоры для механизированного закрепления подвижного состава | Admin | Wiki | 0 | 12.06.2011 19:51 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|










