



|
|
|
|||||||
|
|
#1 (ссылка) |
|
Crow indian







Регистрация: 21.02.2009
Возраст: 41
Сообщений: 30,426
Поблагодарил: 398 раз(а)
Поблагодарили 6046 раз(а)
Фотоальбомы:
2624 фото
Записей в дневнике: 904
Репутация: 126141
|
Тема: [04-2023] Технические решения по централизации управления железнодорожным транспортом в подземных горных выработкахТехнические решения по централизации управления железнодорожным транспортом в подземных горных выработках НИКИТИН Александр Борисович, Петербургский государственный университет путей сообщения Императора Александра I, заведующий кафедрой «Автоматика и телемеханика на железных дорогах», д-р техн, наук, профессор, Санкт-Петербург, Россия БУШУЕВ Сергей Валентинович, Уральский государственный университет путей сообщения, проректор по научной работе, доцент, канд. техн, наук, г. Екатеринбург, Россия ГУНДЫРЕВ Константин Вячеславович, Уральский государственный университет путей сообщения, заведующий научно-исследовательской лабораторией «Компьютерные системы автоматики», г. Екатеринбург, Россия КОПЫТОВ Дмитрий Викторович, Уральский государственный университет путей сообщения, заведующий отделением программного обеспечения научно-исследовательской лаборатории «Компьютерные системы автоматики», г. Екатеринбург, Россия Ключевые слова: локомотивная откатка, подземная горная выработка, централизация, электропривод, троллейный датчик, система управления Аннотация. В статье рассматривается актуальная тема оборудования подземных горных выработок системами электрической централизации. Дано понятие электровозной откатки, перечислены проблемы ее эксплуатации. Рассматриваются разработанные технические решения по модернизации существующих и строительству новых систем управления электровозной откаткой на основе микропроцессорной техники. Описаны преимущества представленных технических решений и выводы по их применению. Системы управления движением поездов на железнодорожном транспорте представлены двумя основными видами: станционные и перегонные. Тиражируемыми станционными системами являются три типа систем электрической централизации стрелок и сигналов (ЭЦ): релейные, релейно-процессорные (РПЦ) и микропроцессорные (МПЦ). К системам, обеспечивающим безопасность движения подвижного состава между раздельными пунктами, относятся различные системы интервального регулирования, прежде всего системы полуавтоматической и автоматической блокировки. В основном они применяются на магистральном транспорте. Однако многие предприятия горной, металлургической промышленности также обладают развитой железнодорожной инфраструктурой. В связи с этим на них тоже возникает необходимость применения аналогичных систем управления. ОСОБЕННОСТИ ПЕРЕДВИЖЕНИЯ НА ШАХТНОМ ЖЕЛЕЗНОДОРОЖНОМ ТРАНСПОРТЕ Особенностью шахтного железнодорожного транспорта является высокая разветвленность инфраструктуры, обуславливающая увеличение концентрации технических средств. Устройства функционируют в агрессивной среде - повышенная влажность, металлическая пыль, низкое сопротивление балласта, повышенное воздействие электромагнитных помех, а в отдельных случаях взрывоопасная среда. Тем не менее здесь применяются в основном те же системы управления с аналогичными алгоритмами функционирования. При этом они адаптированы под конкретный объект путем использования специализированных исполнительных устройств железнодорожной автоматики и телемеханики. 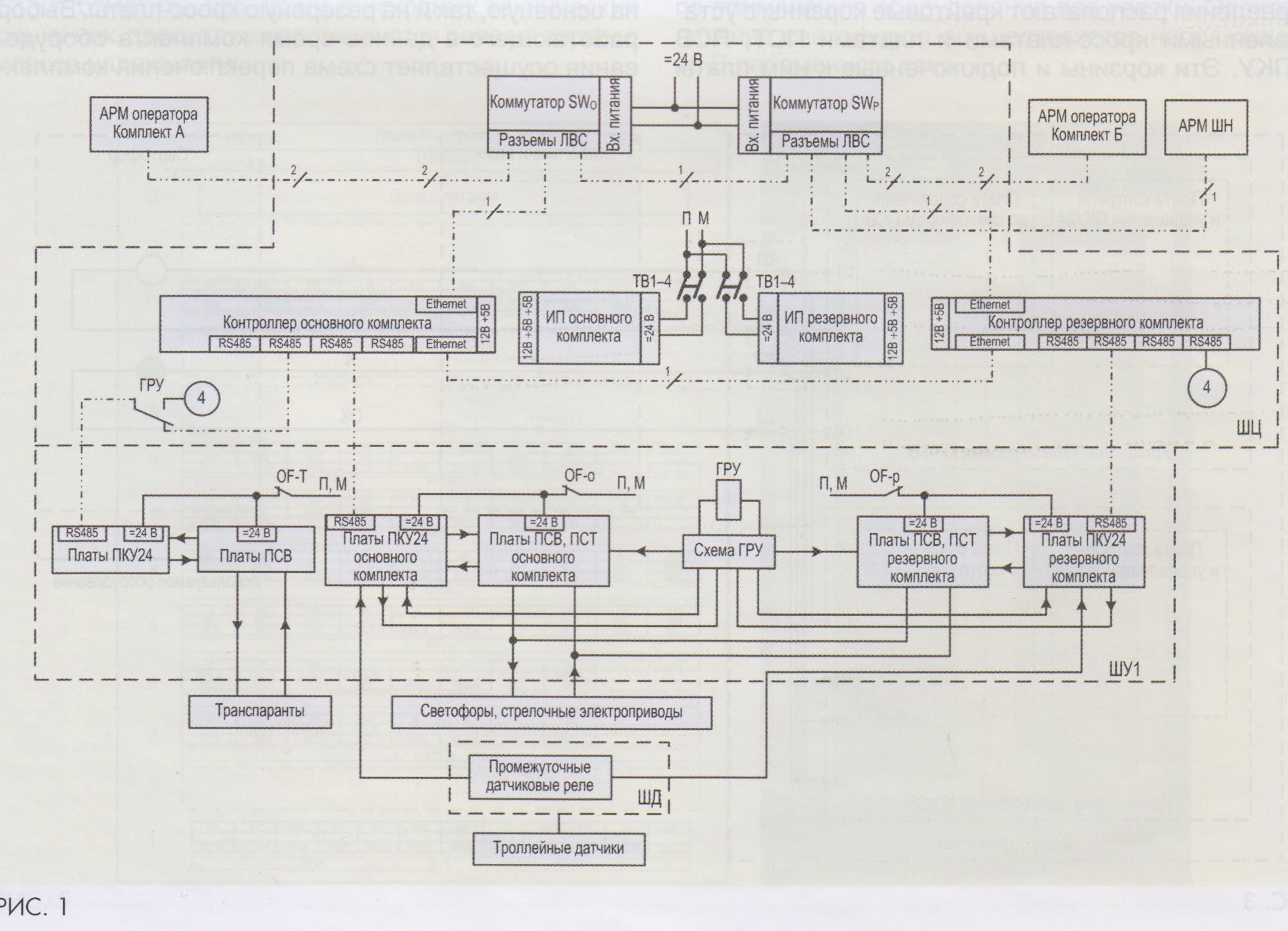 Подземная железнодорожная инфраструктура таких предприятий называется локомотивной или электровозной откаткой. Это вид рельсового транспорта, представляющий собой составы транспортных вагонеток или платформ, перемещаемых по рельсовым путям с помощью тягового агрегата, называемого локомотивом. Локомотивная откатка широко распространена в угольных и рудных шахтах и служит для транспортировки насыпных (угля, руды, породы) и штучных (оборудования) грузов, а также людей по магистральным и подготовительным горным выработкам. Сегодня системы централизованного управления в условиях подземных горных выработок используются не так широко как в наземном железнодорожном транспорте. Основными препятствиями для развития средств автоматизации электровозной откатки являются неудовлетворительные характеристики подвижного состава, изношенность откаточных путей и систем электроснабжения, а также плохое состояние верхнего строения и неровный профиль путей в выработках. Кроме того, одновременно с движением электровозов допускается проход людей, что обусловлено спецификой самой технологии. Данные факторы существенно влияют на проектирование и эксплуатацию систем централизованного управления в горных выработках, где применяются особые решения по управлению стрелками и сигналами. Это и управление стрелками и сигналами на конкретном участке (пересечении или ответвлении), и/или централизация электровозной откатки в целом. Некоторые решения построены на применении стандартного железнодорожного оборудования (например, электропривода СП-6 и его модификаций) с прямопроводным управлением. В основе других лежит использование радиоканала. Специальные алгоритмы позволяют определить положение состава и на основе этой информации формировать управляющие воздействия на напольные устройства. В 1986 г. вступили в действие типовые материалы для проектирования «ТМП 403-01-60.86 Централизованное оперативное управление электровозной откаткой железнорудных шахт» [1], разработанные Криворожским отделением УГПИ «Металлургавто-матика». В их основе лежат технические решения, напоминающие блочную маршрутно-релейную централизацию, когда по плану горизонта расставляются релейные блоки, соединенные между собой согласно путевому развитию. Всего здесь применяется девять основных и пять вспомогательных типовых схемных узлов (блоков). Для маршрутизации передвижений используются светофоры с двузначной сигнализацией - красный и зеленый огни с возможностью включения этих сигналов в мигающем режиме в зависимости от местных условий и требований. Для перевода стрелок применяются электромагнитные стрелочные электроприводы, не требующие регулярного обслуживания. Положение подвижного состава контролируется с помощью так называемых троллейных датчиков, подвешиваемых на контактный провод. Такой способ контроля подвижного состава приемлем в условиях горных выработок, учитывая малую скорость движения по ним (не более 25 км/ч). Токоприемник электровоза «бьет» по датчику, в котором замыкается контактная группа, подавая электрический сигнал в соответствующие релейные схемы. Стоит отметить, что при таком способе контроля подвижного состава невозможно определить точное положение хвоста состава. Поскольку датчики расположены на высоте подвеса контактного провода, существует риск, что он сработает не от электровоза, а от постороннего предмета. 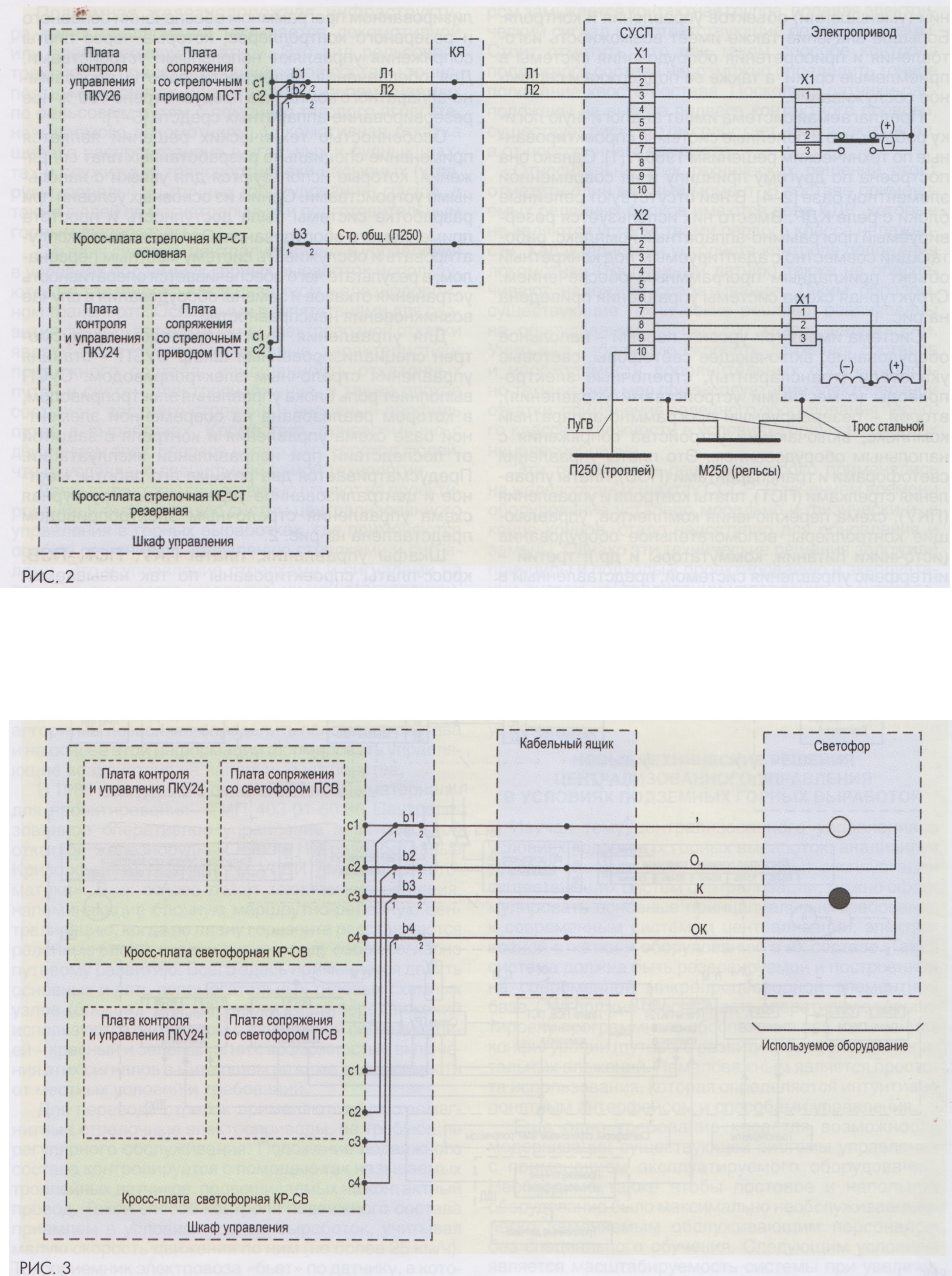 Относительно этих технических решений стоит отметить один важный момент. В составе применяемых релейных блоков имеются реле КДР, которые не являются устройствами первого класса надежности. Характеристики устройств контроля положения локомотива (троллейный датчик) также не обеспечивают надежное срабатывание. Таким образом, существующие технические решения реализованы на оборудовании не первого класса надежности. Учитывая небольшую скорость движения составов и необходимость дополнительных организационно-технических мер при эксплуатации электровозной откатки, применение релейного оборудования первого класса надежности в условиях горных выработок нецелесообразно. Эти технические решения широко применялись на железорудных шахтах СССР. С течением времени оборудование устарело морально и физически и, в конце концов, стало недоступно для обновления и замены. Однако эти технические решения заложили принципы и подходы к проектированию и эксплуатации систем централизации управления электровозной откаткой. Сегодня в рамках реконструкции существующей инфраструктуры или нового строительства с целью увеличения объемов производства часть предприятий горнодобывающей промышленности готова к внедрению новых систем управления электровозной откаткой взамен морально и физически устаревших. НОВЫЕ ТЕХНИЧЕСКИЕ РЕШЕНИЯ ЦЕНТРАЛИЗОВАННОГО УПРАВЛЕНИЯ В УСЛОВИЯХ ПОДЗЕМНЫХ ГОРНЫХ ВЫРАБОТОК Изучая тему централизованного управления в условиях подземных горных выработок, анализируя условия эксплуатации, а также опыт эксплуатации существующих систем централизации, можно сформулировать основные принципиальные требования к современным системам централизации, электровозной откатки и оборудованию в их составе. Такая система должна быть резервируемой и построенной на современной микропроцессорной элементной базе. Она должна обеспечивать оперативную корректировку программного обеспечения при изменениях конфигурации (путевого развития) без больших капитальных вложений. Немаловажным является простота использования, которая определяется интуитивно понятным интерфейсом и способами управления. Еще одно требование касается возможности модернизации существующей системы управления с применением эксплуатируемого оборудования. Необходимо также чтобы постовое и напольное оборудование было максимально необслуживаемым, легко заменяемым обслуживающим персоналом без специального обучения. Следующим условием является масштабируемость системы при увеличении (уменьшении) объектов управления и контроля. Большое значение также имеет возможность изготовления и приобретения оборудования системы в приемлемые сроки, а также ее поддержка и сервисное обслуживание. Предлагаемая система имеет аналогичную логику работы, что и релейные системы, спроектированные по техническим решениям 1986 г. [1]. Однако она построена по другому принципу и на современной элементной базе [2—4]. В ней отсутствуют релейные блоки с реле КДР. Вместо них используется резервируемый программно-аппаратный комплекс, работающий совместно с адаптируемым под конкретный объект прикладным программным обеспечением. Структурная схема системы управления приведена на рис. 1. Система имеет три уровня: первый - напольное оборудование, включающее светофоры, световые указатели (транспаранты), стрелочные электроприводы (с местными устройствами управления); второй - резервируемый программно-аппаратный комплекс, включающий устройства сопряжения с напольным оборудованием. Это платы управления светофорами и транспарантами (ПСВ), платы управления стрелками (ПСТ), платы контроля и управления (ПКУ), схема переключения комплектов, управляющие контроллеры, вспомогательное оборудование (источники питания, коммутаторы и др.); третий -интерфейс управления системой, представленный в виде автоматизированных рабочих мест оператора. Логика работы системы реализована в специа лизированном программном обеспечении основного и резервного контроллеров, которые через платы сопряжения управляют напольными устройствами. Для обеспечения надежности работы программно-аппаратного комплекса предусмотрено 100 %-ное резервирование аппаратных средств [5-7]. Особенностью технических решений является применение специально разработанных плат сопряжения, которые используются для увязки с напольными устройствами. Одним из основных условий при разработке системы была доступность и простота применяемого оборудования. Это позволяет эксплуатировать и обслуживать систему местным персоналом, в результате чего обеспечивается оперативность устранения отказов и замены оборудования в случае возникновения неисправностей. Для управления электроприводом предусмотрен специализированный шкаф СУСП - станция управления стрелочным электроприводом. СУСП выполняет роль блока управления электроприводом, в котором реализована на современной элементной базе схема управления и контроля с защитой от последствий при неправильной эксплуатации. Предусматривается два режима его работы: местное и централизованное управление. Структурная схема управления стрелочным электроприводом представлена на рис. 2. Шкафы управления, платы ПКУ, ПСТ, ПСВ, кросс-платы спроектированы по так называемой крейтовой технологии, когда в специализированные шасси (крейты) устанавливают унифицированные модули, имеющие стандартные размеры и разъемы подключения [8-10]. В данном случае в шкафу управления располагают крейтовые корзины с установленными кросс-платами и платами ПСТ, ПСВ и ПКУ. Эти корзины и подключенные к ним платы имеют 100 %-ный «горячий» резерв. Информация от напольных устройств одновременно поступает как на основную, так и на резервную кросс-платы. Выбор работающего в данное время комплекта оборудования осуществляет схема переключения комплектов. Крейтовая технология существенно облегчает монтаж и обслуживание системы, а также замену неисправных элементов. Структурные схемы платы управления светофором и контроля положения электровоза показаны на рис. 3 и 4 соответственно. Для контроля положения электровоза в рассматриваемых технических решениях используются традиционные троллейные датчики. Пантограф проезжающего под датчиком электровоза «бьет» по его выступающей части и замыкает контакт внутри устройства. Через этот контакт потенциал +250 В подается на обмотку реле, а затем через фронтовые контакты реле попадает на платы в шкаф управления. Стоит отметить, что, как и в исходных технических решениях, здесь также применяются реле не первого класса надежности. Вариант компоновки шкафа управления системы и его внешний вид показаны на рис. 5. На этом примере используется восемь крейтовых корзин с установленными в них платами сопряжения. Одной из особенностей при разработке и проектировании технических решений является электропитание микропроцессорных и электронных устройств. Как правило, при строительстве электровозной откатки применяется напряжение 250 В постоянного тока для контактной сети [11]. Этим же напряжением осуществляется питание стрелочных электроприводов и СУСП для местного управления стрелкой. По этой причине возникают определенные ограничения по применению оборудования для увязки. Электропитание светофоров осуществляется напряжением 48 В переменного тока. 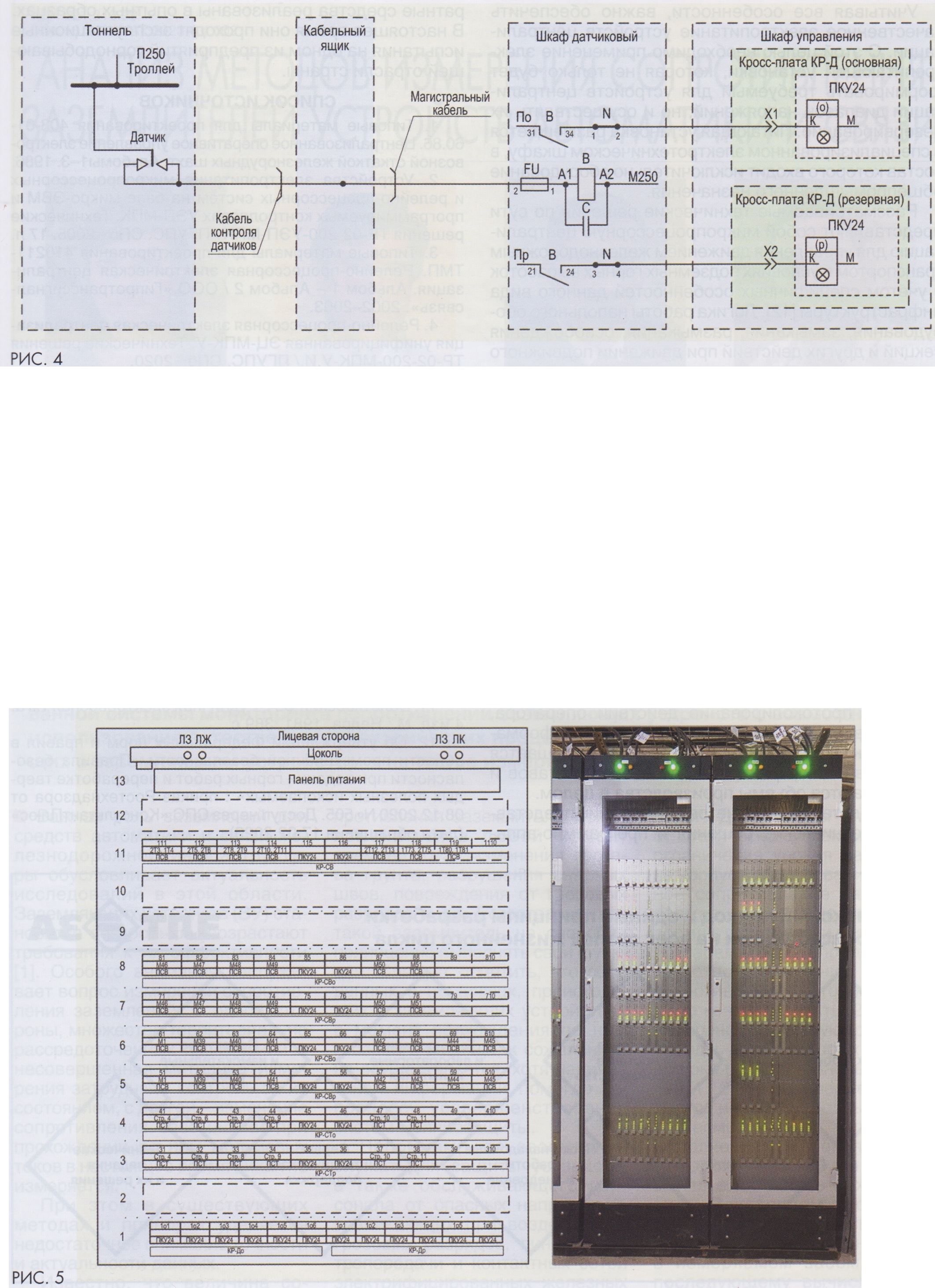 Учитывая все особенности, важно обеспечить качественное электропитание устройств централизации. С этой целью необходимо применение электропитающей установки, которая не только будет формировать требуемый для устройств централизации диапазон напряжений, но и осуществлять их резервирование. Питающая установка размещается в специализированном электротехническом шкафу, в состав которого входит исключительно оборудование общепромышленного назначения. Рассматриваемые технические решения по сути представляют собой микропроцессорную централизацию для управления движением железнодорожным транспортом в условиях подземных горных выработок с учетом специфичных особенностей данного вида инфраструктуры [12]. Логика работы напольного оборудования, замыкания, размыкания, освобождения секций и других действий при движении подвижного состава реализована резервируемыми программно-аппаратными средствами. Благодаря этому технические решения имеют существенное преимущество -это относительно простая масштабируемость и возможность корректировки программного обеспечения без существенных капитальных вложений по сравнению с применяемыми ранее решениями. Возможность модернизации системы управления на железнодорожном транспорте в горных выработках без изменения общепринятых подходов с применением привычного, используемого ранее, напольного оборудования делает их полноценной альтернативой морально и физически устаревшим релейным системам, оборудование которых на сегодняшний день отсутствует в производстве. При этом достигается повышение культуры производства, а также дополнительный функционал: диагностика системы, протоколирование действий оператора, предоставление нормативно-справочной информации, подсказки при работе и др. В итоге повышается эффективность управления движением составов и увеличиваются объемы производства в целом. После детальных расчетов и испытаний представленные технические решения и программно-аппа ратные средства реализованы в опытных образцах. В настоящее время они проходят эксплуатационные испытания на одном из предприятий горнодобывающей отрасли страны. СПИСОК источников 1. Типовые материалы для проектирования 403-01-60.86. Централизованное оперативное управление электровозной откаткой железнорудных шахт. Альбомы1-3.1986. 2. Устройства электропитания микропроцессорных и релейно-процессорных систем на базе микро-ЭВМ и программируемых контроллерах УЭП-МПК. Технические решения ТР-02-200-УЭП-МПК / ПГУПС. СПб., 2005. 17 л. 3. Типовые материалы для проектирования 410211-ТМП. Релейно-процессорная электрическая централизация. Альбом 1 - Альбом 2 / ООО «Гипротранссигнал-связь». 2002-2003. 4. Релейно-процессорная электрическая централизация унифицированная ЭЦ-МПК-У. Технические решения ТР-02-200-МПК-У.И./ ПГУПС. СПб., 2020. 5. Методы построения безопасных микроэлектронных систем железнодорожной автоматики / В.В. Сапожников, Вл.В. Сапожников, Х.А. Христов, Д.В. Гавзов. М.: Транспорт, 1995. 272 с. 6. РТМ 32 ЦШ 1115842.01-94. Безопасность железнодорожной автоматики и телемеханики. Методы и принципы обеспечения безопасности микроэлектронных СЖАТ. СПб.: ПГУПС, 1994. 120 с. 7. Сапожников В.В., Никитин А.Б. Микропроцессорная система электрической централизации МПЦ-МПК// Наука и транспорт. 2009. № S. С. 18-21. 8. Семенов Б.Ю. Силовая электроника: для любителей и профессионалов. М.: СОЛОН-Р, 2001. 327 с. 9. Analog-digital conversion / ed by W. Kester. Analog Devices, Inc., 2004. 10. Бердичевский M.E. Конструктивы Евромеханики во встраиваемых системах // СТА. 2002. Ns 4. С. 52-59. URL: https://www.cta.rU/cms/f/340838.pdf. 11. Волотковский С.А. Рудничная электровозная тяга. 4 изд. М.: Недра, 1981.389 с. 12. Об утверждении Федеральных норм и правил в области промышленной безопасности «Правила безопасности при ведении горных работ и переработке твердых полезных ископаемых» : приказ Ростехнадзора от 08.12.2020 № 505. Доступ через СПС «КонсультантПлюс» (дата обращения 17.02.2023). |
|
|
Цитировать 14 |
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| [11-2023] Мониторинг как инструмент управления транспортом | Admin | xx3 | 0 | 04.12.2023 06:20 |
| Совершенствование системы управления железнодорожным транспортом, обслуживания пассажиров и грузовладельцев | Admin | Ж/д статьи | 0 | 26.03.2016 17:57 |
| О результатах структурной реформы управления железнодорожным транспортом | Филантроп | Общие вопросы железных дорог | 6 | 25.05.2015 10:48 |
| =Техн. решения= Технические решения по увязке линейного пункта ДЦ "Сетунь" и микропроцессорной централизации МПЦ-И - 424359-06-ТР | Admin | Диспетчерские централизации и диспетчерский контроль | 0 | 07.12.2010 06:12 |
| Технические решения увязки устройств ЭЦ со схемами управления упорами тормозными стационарными (УТС-380) - 419607 | Толян | Приборы и напольное оборудование | 0 | 17.01.2010 09:22 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , , , , , , , , , , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|








