



|
|
|
|
#1 (ссылка) |
|
Crow indian







Регистрация: 21.02.2009
Возраст: 41
Сообщений: 30,455
Поблагодарил: 398 раз(а)
Поблагодарили 6046 раз(а)
Фотоальбомы:
2624 фото
Записей в дневнике: 905
Репутация: 126141
|
Тема: [02-2026] Проблемы эксплуатации электровозов серии 2(3)ЭС5К «ЕРМАК»Проблемы эксплуатации электровозов серии 2(3)ЭС5К «ЕРМАК» Из опыта работы Красноярской и Западно-Сибирской дирекций тяги А.А. КУЛЬДИШОВ, заместитель начальника Западно-Сибирской железной дороги (по Алтайскому территориальному управлению), А.А. СМОЛИН, электромеханик сервисного локомотивного депо Абакан филиала «Восточно-Сибирский» ООО «ЛокоТех-Сервис» В Алтайском и Омском регионах Западно-Сибирской железной дороги успешно эксплуатируются электровозы нового поколения 2(3)ЭС5К «Ермак», оснащенные микропроцессорной системой управления и диагностики ( МСУД
) с поосным регулированием силы тяги, оборудованные двумя вариантами схемы возбуждения тяговых электродвигателей (последовательная и независимая), а также системой рекуперативного торможения.Благодаря примененным техническим решениям, КПД электровоза 2ЭС5К в продолжительном режиме выше на 1,2 %, чем КПД электровоза ВЛ80С. Также, в сравнении с электровозом ВЛ80С, локомотив «Ермак» имеет повышенные на 5 — 7 % тяговые характеристики. Улучшенные тяговые характеристики электровозов 2ЭС5К позволили повысить весовую норму грузовых поездов по участкам обслуживания на 12,5 %. Кроме того, появилась возможность вождения грузовых поездов весом 8000 т на участке обслуживания Алтайская — Карасук — Иртышское одним локомотивом двухсекционного исполнения 2ЭС5К. Примененные в конструкции электровозов 2ЭС5К технические решения в процессе вождения поездов позволяют:
Так, согласно «Техническим требованиям к программному обеспечению МСУД-015» [2] (ТТ ПО МСУД-015), на электровозах 2ЭС5К при последовательном возбуждении (ПВ) тяговых электродвигателей (ТЭД) работают пять каналов системы защиты от проскальзывания колесных пар (боксова-ния):
На рис. 1 представлены пять временных этапов одного цикла боксова-ния 12-й колесной пары электровоза 3ЭС5К № 1286, работающего в режиме последовательного возбуждения (ПВ). 1-й этап — момент срыва 12-й колесной пары (КП) в режим боксования. Здесь видно, что, стремясь поддержать снижающийся ток на тяговом электродвигателе (1ТЭд), МСУД поднимает значение напряжения (иТЭд) путем увеличения регулируемого угла открытия тиристоров аг, чем усугубляет ситуацию, увеличивая частоту вращения боксующей КП. 2-й этап — подача песка и блокировка роста аг. Канал защиты включается при превышении уставки по скольжению на 2 км/ч и более, но боксующая КП № 12 продолжает разгоняться, так как ранее на её ТЭд было увеличено напряжение иТЭд. 3-й этап — снижение угла аг и подача песка. Канал защиты включается при превышении уставки по скольжению более 4 км/ч. Только здесь начинается замедление частоты вращения КП до уменьшения скольжения в 4 км/ч. 4-й этап — скольжение уменьшается с 4 до 2 км/ч, при этом ток возрастает благодаря снижению скорости вращения колесной пары. Остаются включенными каналы подачи песка и блокировки роста аг. 5-й этап — при скольжении менее 2 км/ч отключается канал подачи песка и блокировки роста аг. В этот момент система МСУд при наличии остаточного скольжения, не выдерживая паузу, вновь увеличивает угол аг для выравнивания тока двигателя к заданным значениям, тем самым запускается новый цикл процессов боксования. На рис. 2 показано сравнение работы каналов защиты от боксования 12-й КП электровоза 3ЭС5К № 1286 в режимах тяги с НВ и ПВ. Переход из НВ в ПВ произошел автоматически по причине отключения одного быстродействующего выключателя (ВБ) на ведомой секции. В нижнем поле дискретных сигналов видно, что канал защиты при скольжении выше 4 км/ч срабатывает только в режиме ПВ, но при этом в режиме НВ чаще срабатывает канал по «рывку» отдельной КП (производная ускорения dAi/dt c уставкой 0,12 м/с3), что очень негативно влияет на все элементы в конструкции тягового привода. В процессе работы ТЭд с НВ указанный недостаток можно исключить, а также снизить количество срабатываний канала по скольжению «на 2 км/ч», запретив МСУд увеличивать угол регулирования импульсов аг, целью которого является поддержание тока на начальном этапе боксования. На рис. 3 приведен пример синхронного боксования КП в режиме тяги с НВ, когда все КП одной секции электровоза 3ЭС5К № 1090 разгоняются до скоростей более 100 км/ч! При этом две другие секции, согласно всем зарегистрированным параметрам, следуют со скоростью 44 км/ч! В данном случае при синхронном боксовании всех четырех КП одной секции электровоза 3ЭС5К № 1090 в режиме тяги с НВ ТЭд периодически срабатывали только два канала защиты от боксования: Ф по «рывку» отдельных колесных пар (производная ускорения dAi/dt c уставкой 0,12 м/с3); Ф по скольжению «> 2 км/ч». Они, лишь временно блокируя рост угла аг, периодически замедляли разгон отдельных КП, тем самым не допуская между ними скольжения более 2 км/ч. Каналы защиты от бок-сования, которые могли бы осуществлять снижение токов ТЭД в режиме тяги с НВ, не срабатывают согласно ТТ ПО МСУД-015. Машинист, реагируя на недопустимый рост скорости, сам контроллером уменьшает заданный ток Ipult, при этом снижение силы тяги фактически происходит только на небоксующих секциях, а здесь токи уже снизились благодаря росту ЭДС ТЭД, поэтому угол регулирования аг не уменьшается, из-за чего происходит дальнейший рост частоты вращения колесных пар.  Иными словами, алгоритм защиты при синхронном боксовании не продуман в полной мере, и система МСУД в своей работе не учитывает фактическую скорость других секций. Все его каналы защиты от боксования анализируют входные сигналы датчиков путевой скорости (ДПС) только для каждой секции в отдельности. Здесь стоит добавить, что за всё время наблюдений не зарегистрировано ни одного случая синхронного боксования в режиме тяги с ПВ. Это явление, скорее всего, объясняется работой каналов, которым в режиме тяги с ПВ разрешено снижать угол регулирования аг. На рис. 4 — 7 приведены наглядные примеры, которые непосредственно создали потенциальную угрозу безопасности движения поездов при эксплуатации электровозов 3ЭС5К. На рис. 4 показана попытка взятия грузового поезда с места на подъеме электровозом 3ЭС5К № 1534 в режиме НВ ТЭД, когда 6-я КП, сорвавшись в боксование, пилила рельсы, так как система МСУД, увеличивая зоны и углы регулирования аг разогнала её до 50 км/ч, поддерживая этот режим по времени более 50 с. В подобной ситуации возникает вопрос: при какой минимальной скорости КП электровоза включаются все каналы защиты от боксования? В данном случае сработал только один канал по скольжению «> 2 км/ч», при этом очень поздно — на 2 с после начала роста напряжения на якоре 6-го ТЭД! Блокировка роста угла регулирования аг включилась в 4-й зоне (схемой предусмотрено четырехзонное плавное регулирование выпрямленного напряжения) при наличии на якоре 6-го ТЭД напряжения U = 1020 В. На рис. 5 представлен еще один пример пропила рельсовой колеи, но уже в режиме ПВ ТЭД электровоза 3ЭС5К № 1545. Ситуация практически совпадает с той, что происходила в режиме НВ. Скорость 4-й КП изменилась скачкообразно с 0 до 63 км/ч и задержкой по времени на 2,3 с от начала роста напряжения 4-го ТЭД, но этого времени достаточно для увеличения угла регулирования аг до 4-й зоны. Несмотря на то, что при скачке скорости включился канал снижения угла аг по скольжению выше 4 км/ч, скорость продолжала возрастать с 63 до 81 км/ч. Из приведенных примеров можно сделать следующий вывод: при малых скоростях движения электровоза 3ЭС5К МСУД не может производить адекватный анализ информации, полученной от ДПС колесных пар. Одновременно с этим мы не видим проблем, связанных с обработкой аналоговых сигналов от датчиков напряжения (U) и тока (I) на якорях всех ТЭД, величина которых зависит от скорости вращения КП. На рис. 6 показан момент спрессов-ки малой шестерни 3-го ТЭД у электровоза 2ЭС5К № 1264. В этой ситуации МСУД видит падение тока 1ТЭд при отсутствии изменения скорости 3-й КП и, аналогично со случаем пропила рельс, поднимает угол регулирования аг до 4-й зоны, где срабатывает ограничение по напряжению U = 1000 В. В этот момент для системы МСУД в приоритете стоит задача — поддержание снижающегося тока якоря 1ТЭд! При таких изменениях параметров МСУД не определяет данную ситуацию аварийной и не выдает никакой информации машинисту об опасности, а также не применяет меры по ограничению силы тяги. Хотя последствия данной неисправности тягового редуктора, как правило, создают риски, серьезно угрожающие безопасности движения поездов. Согласно результатам анализа отказов оборудования электровозов 2(3)ЭС5К, проведенного в сервисном локомотивном депо Абакан, шесть из восьми произошедших случаев спрес-совок малых шестерен у ТЭД произошли в режиме тяги с НВ ТЭД, что может являться следствием частых «рывков» отдельных колесных пар (см. рис. 2). На рис. 7 показана работа МСУД в режиме НВ ТЭД во время боксования 10-й КП при неисправном ДПС 11-й КП электровоза 3ЭС5К № 1104. Здесь показан пример срыва в боксовку 10-й КП с её разгоном во вращении до 168 км/ч. Каналы защиты от боксования не срабатывают, так как МСУД включает их только при соблюдении условий исправной работы ДПС всех КП на секции (п. 21.2 ТТ ПО МСУД-015 [2]). МСУД увеличивает угол регулирования аг ВИП 10-го ТЭД до 4-й зоны, поддерживая падающий ток. При возрастании напряжения на 10-м ТЭД МСУД снижает ток возбуждения и на остальных ТЭД токи якорей до 1-й зоны, обеспечивая тем самым соблюдение соотношений величины токов. В результате сила тяги на данной секции электровоза стала менее 20 % по отношению к другим секциям. Заканчивается режим НВ ТЭД срабатываем ВБ (схемное обозначение QF11), выводя тем самым из работы ТЭД № 10. На рис. 8 представлен пример продолжения событий, показанных на рис. 7, но уже в режиме тяги с ПВ. При достижении скорости движения электровоза 3 км/ч сорвалась в боксование 11-я КП, у которой неисправен ДПС (скорость V = 0 км/ч). МСУД снова поднимает угол регулирования аг до 4-й зоны, и напряжение на якоре 11-го ТЭД возрастает до U = 1000 B. Пусковые характеристики на рис. 2.1 Руководства по эксплуатации ИДМБ.661142.009-05РЭ1 приведены только до конструкционной скорости 110 км/ч в 4-й зоне при токе 250 А. В нашем случае скорость 11-й КП была выше, так как ток 11-го ТЭД составил 220 А. После остановки электровоза и перевода контроллера в положение «П» 11-я КП вращалась ещё в течение 9 с, что определяется по снижению напряжения (U) до нуля на 11-м ТЭД. В этот момент и произошло образование основного дефекта рельсов (рис. 9). В подобных ситуациях МСУД не контролирует работу датчиков тока и напряжения (как в этом случае), не анализирует их данные в тяговом режиме. На рис. 10 показан процесс следования грузового поезда по участку с заклинившим 4-м колесно-моторным блоком (КМБ) у электровоза 3ЭС5К № 992. Данную ситуацию система МСУД ложно определила как неисправность датчика путевой скорости (ДПС) 4-й КП и выдала машинисту сообщение на монитор следующего характера: «С1: Неисправность по датчикам скорости (Неисправность в ДПС4, канал 1; Неисправность в ДПС4, канал 2)». Далее система МСУД поддерживала заданный ток на всех ТЭД, не сравнивая напряжения (U) между ТЭД. На рис. 10 показан скрин, где ток на всех ТЭД (I) секции поддерживается в пределах 900 — 910 А. При этом напряжение на трех ТЭД составляет 840 — 860 В, а на 4-м ТЭД его величина была всего 30 В. Все ВИП электровоза в тот момент работали в 4-й зоне регулирования, и только ВИП 4-го ТЭД находился в 1-й зоне. В этом случае только чудо спасло от крушения — грузовой поезд с заклиненным КМБ у электровоза 3ЭС5К № 992 проследовал 7 станций и около 130 км пути! 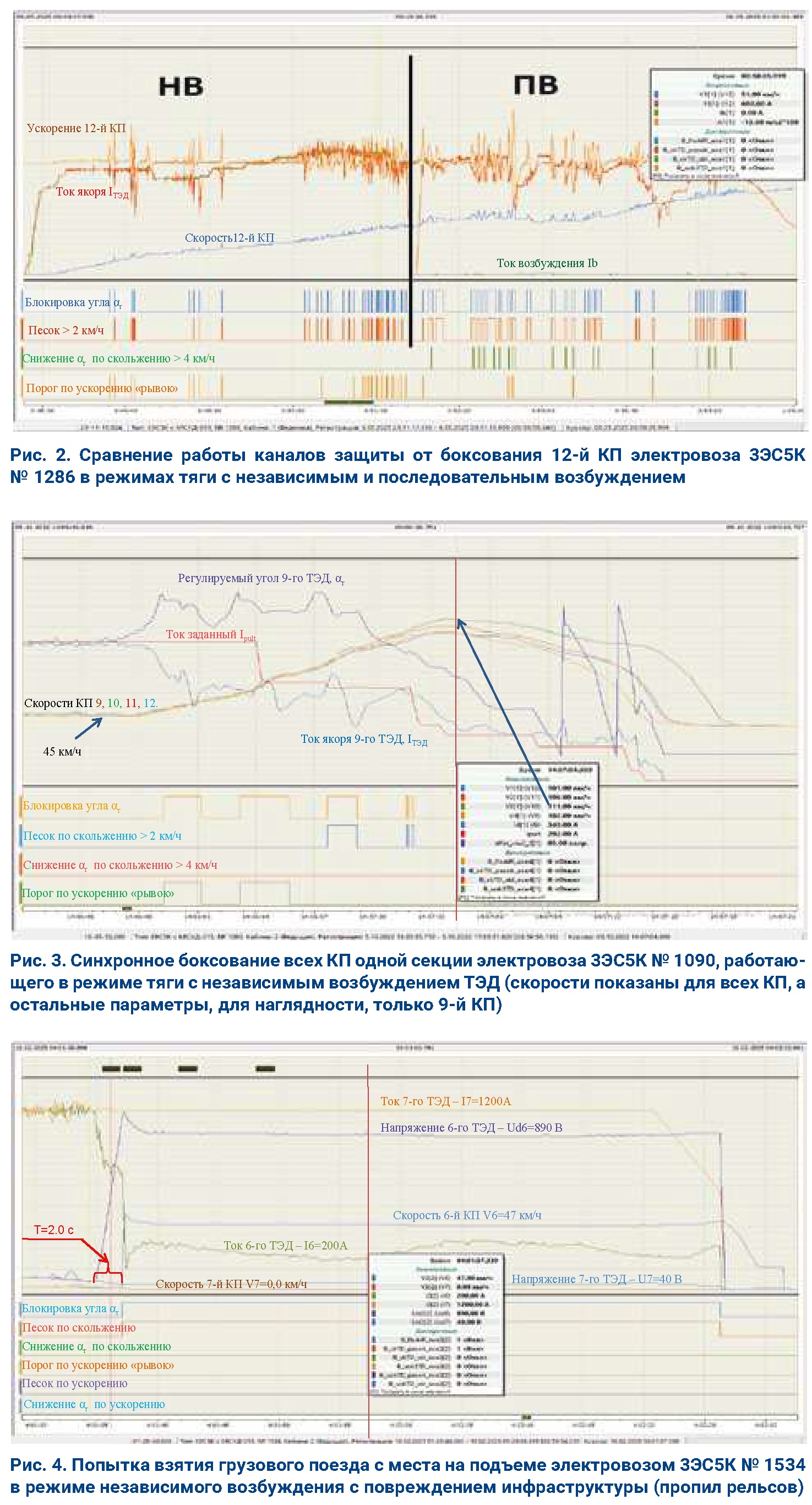 Следует отметить, что основными показателями, характеризующими режимы нагруженности локомотива, являются обобщенные критерии проскальзывания колесных пар, которые выражаются в обозначениях Тл и S^ ♦ Тл: среднее относительное время проскальзывания колесных пар локомотива, который отражает уровень использования тяговых возможностей электровоза; ♦ Sn: относительный путь, пройденный колесными парами локомотива благодаря проскальзыванию, который характеризует износы колесных пар и рельсов. Режимы нагруженности локомотивов по сцеплению классифицируются на «экономный», «рациональный», «интенсивный» и «недопустимый». При «интенсивном» режиме работы локомотива велика вероятность возникновения таких опасных факторов, как повреждения узлов локомотива, а также случаев «растяжек» в пути следования, вследствие чего растут затраты на ремонт локомотивов и на содержание железнодорожного пути. При «недопустимом» режиме работы локомотива ситуация характеризуется тем, что при небольшом изменении внешних факторов частота и продолжительность случаев боксова-ния колесных пар локомотивов нарастают лавинообразно. По приведенным выше примерам ясно, что действия МСУД в начале бок-сования приводят к увеличению значений Тл и 8л, соответственно, возрастает износ колесных пар, а также рельсовой колеи. В этих условиях увеличивается вероятность возникновения отказов тягового привода электровоза. 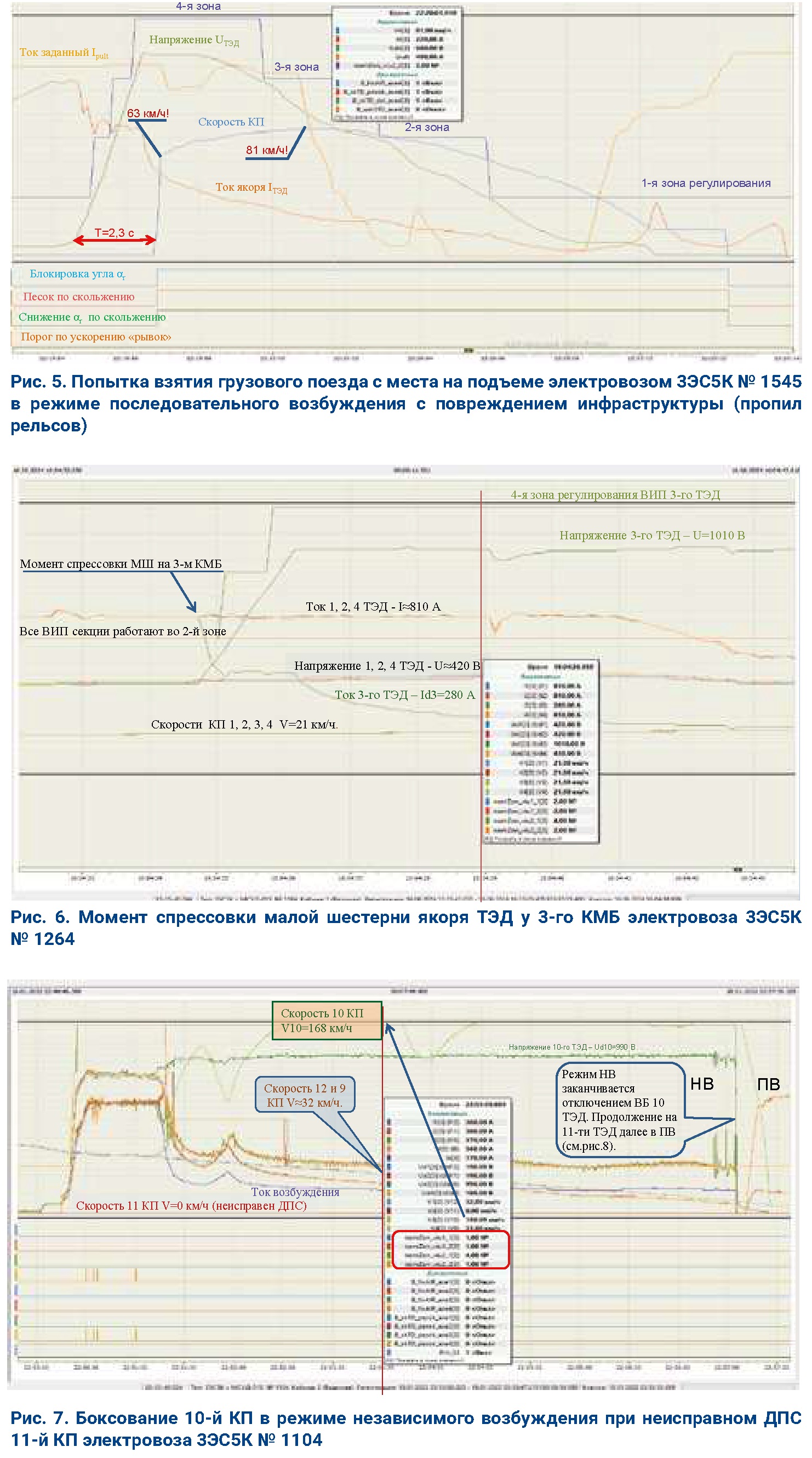 На данный момент электровозы 2(3)ЭС5К эксплуатируются в «недопустимом» режиме нагруженности по сцеплению, так как при небольшом изменении внешних воздействий (дождь, снег, изморозь), при следовании на подъем граничные значения обобщенных показателей проскальзывания превышают значения, указанные в таблице 7.1 Приложения № 7 к «Правилам тяговых расчетов для поездной работы», утвержденным распоряжением ОАО «РЖД» от 12.05.2016 № 867р. В качестве наглядного примера приведен рис. 11, на котором отражены процессы боксования колесных пар секции № 1 электровоза 3ЭС5К № 1233 в течение 21 мин на режиме НВ ТЭД, где: 0 в верхнем поле аналоговых параметров показаны токи якорей ТЭД; в нижнем поле дискретных сигналов отображено срабатывание канала защиты по скольжению с уставкой «2 км/ч». При этом первая КП из режима скольжения не выходит, а три из четырех колесных пар в течение 9 мин бок-суют одновременно. Согласно полученным данным, можно вычислить значения обобщенных показателей проскальзывания: ^ Тл — среднее относительное время проскальзывания колесных пар; ^ Ыл — число одновременно боксу-ющих осей; ^ Тп — относительная продолжительность подачи песка (в новых версиях МСУД учитывает длительность подачи песка для каждого клапана форсунок). Вернувшись к рис. 1, можно сделать следующий вывод. Система МСУД своими неправильными действиями на первом этапе боксования увеличивает негативные факторы одиночного боксования (ускорение, скольжение, время проскальзывания) в четыре раза! Другими словами, своим алгоритмом работы МСУД сама создает условия для работы локомотива в «недопустимом» режиме нагруженности по сцеплению. Если этот недостаток системы исправить, то по самым пессимистичным предположениям, локомотив будет работать, как минимум, в «интенсивном» режиме. 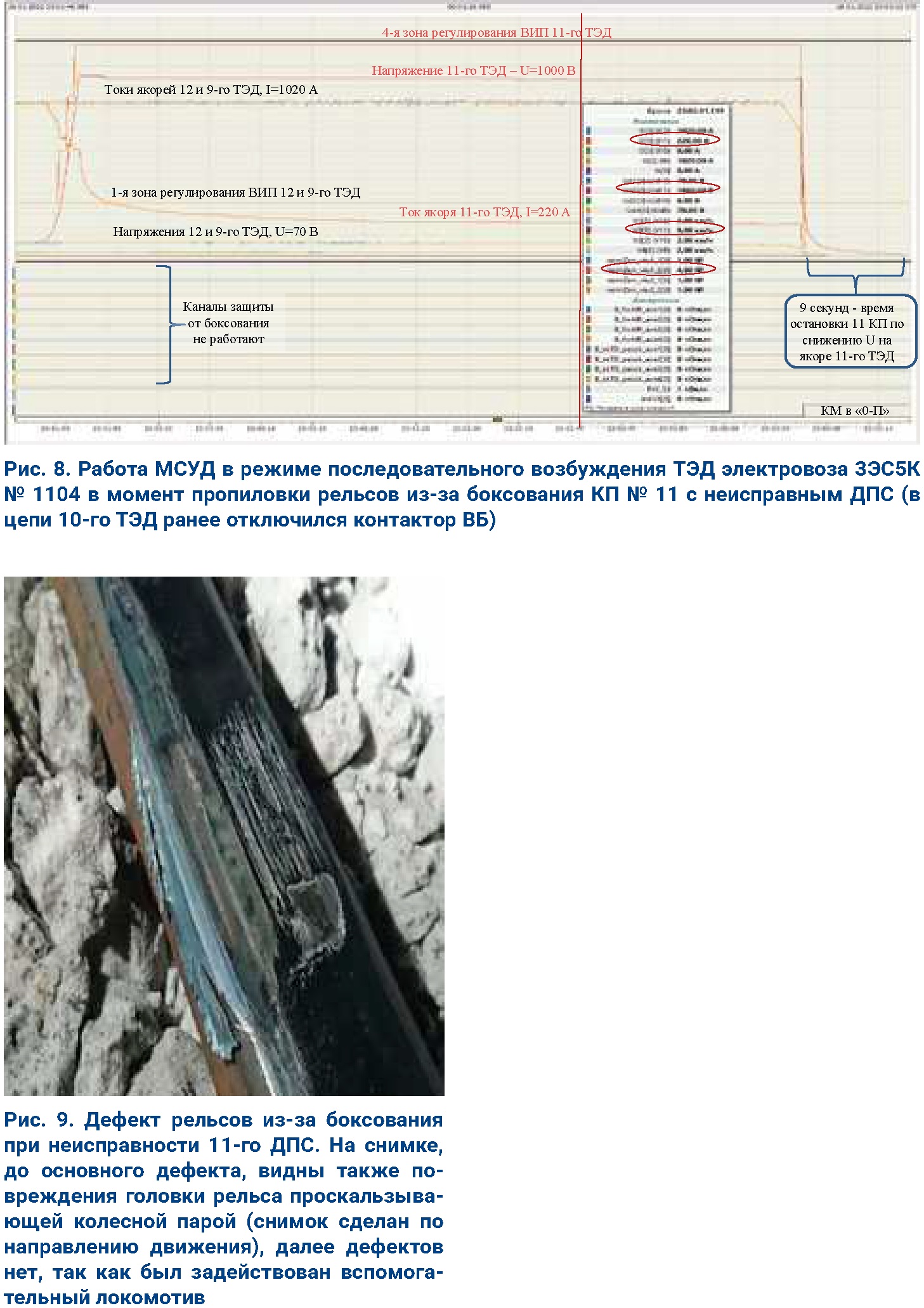 На рис. 12 приведены предложения авторов статьи. На начальном этапе развития боксования необходимо исключить рост угла аг. В этом случае масштабы интенсивности боксований будут выглядеть, как это показано на 4-м этапе временных отрезков рис. 1 или примерно так же, как это показано на рис. 12. Снижение тока в начале развития процесса боксования будет происходить быстрее, что позволит значительно раньше отреагировать на этот процесс противобоксовочной системе локомотива, включив в конструкцию алгоритмов дополнительный канал по производной «d(Izad- Ii)/dt» (на рис. 12 — красная линия внизу). Подача песка должна осуществляться с момента срабатывания канала «d(Izad-Ii)/dt» и продолжаться до момента восстановления заданного тока на ТЭД, т.е. до полного прекращения боксования. Кроме того, учитывая закономерность, при которой во время реализации силы тяги двухосной тележки электровоза создается опрокидывающий момент, который разгружает нечетные по ходу движения колесные пары и приводит к снижению касательной силы тяги на них, д-р техн. наук Ю.В. Голов предложил ввести в алгоритм поосно-го регулирования силы тяги дополнительные коэффициенты, снижающие электромагнитные моменты ТЭД для нечетных колесных пар и повышающие электромагнитные моменты ТЭД для четных колесных пар [1]. Принятая система (догрузки) с оценкой фактического коэффициента сцепления позволит допустить снижение касательной силы тяги нечетных колесных пар и повысить силу тяги четных колесных пар. Как результат, влияние опрокидывающего момента тележки нивелируется суммарной силой тяги электровоза и даст устойчиво, совместно с импульсной подачей песка, реализовать максимальную силу тяги электровоза. Рекомендовано перераспределить силу тяги с 1-й колесной пары на 15 %, а с 3-й, 5-й, 7-й, 9-й и 11-й колесных пар — на 10 % (нумерация колесных пар указана по ходу движения поезда). Здесь нужно учесть то, что введение таких коэффициентов теоретически может привести к тому, что при следовании без боксований (более легкий профиль) обмотки четных ТЭД будут иметь больший нагрев. Как следствие, при следовании по лимитирующим подъемам может включиться защита по ограничению тока ТЭД. Для исключения такой ситуации добавочные коэффициенты должны подключаться при необходимости по управляющей команде машиниста. Кстати, при перегреве даже одной обмотки ТЭД (как правило, это ТЭД не- боксующей КП, на котором ток не снижается) защитной системой электровоза вводится ограничение тока ТЭД не более 810 А для всего электровоза! И это с наличием функции поосного регулирования тяги, имеющейся на электровозах данной серии! Создав в алгоритме работы МСУД функцию, определяющую Ti — относительное время проскальзывания i-й колесной пары — можно реализовать (даже по имеющимся параметрам) на практике адаптивную противобоксовочную защиту. 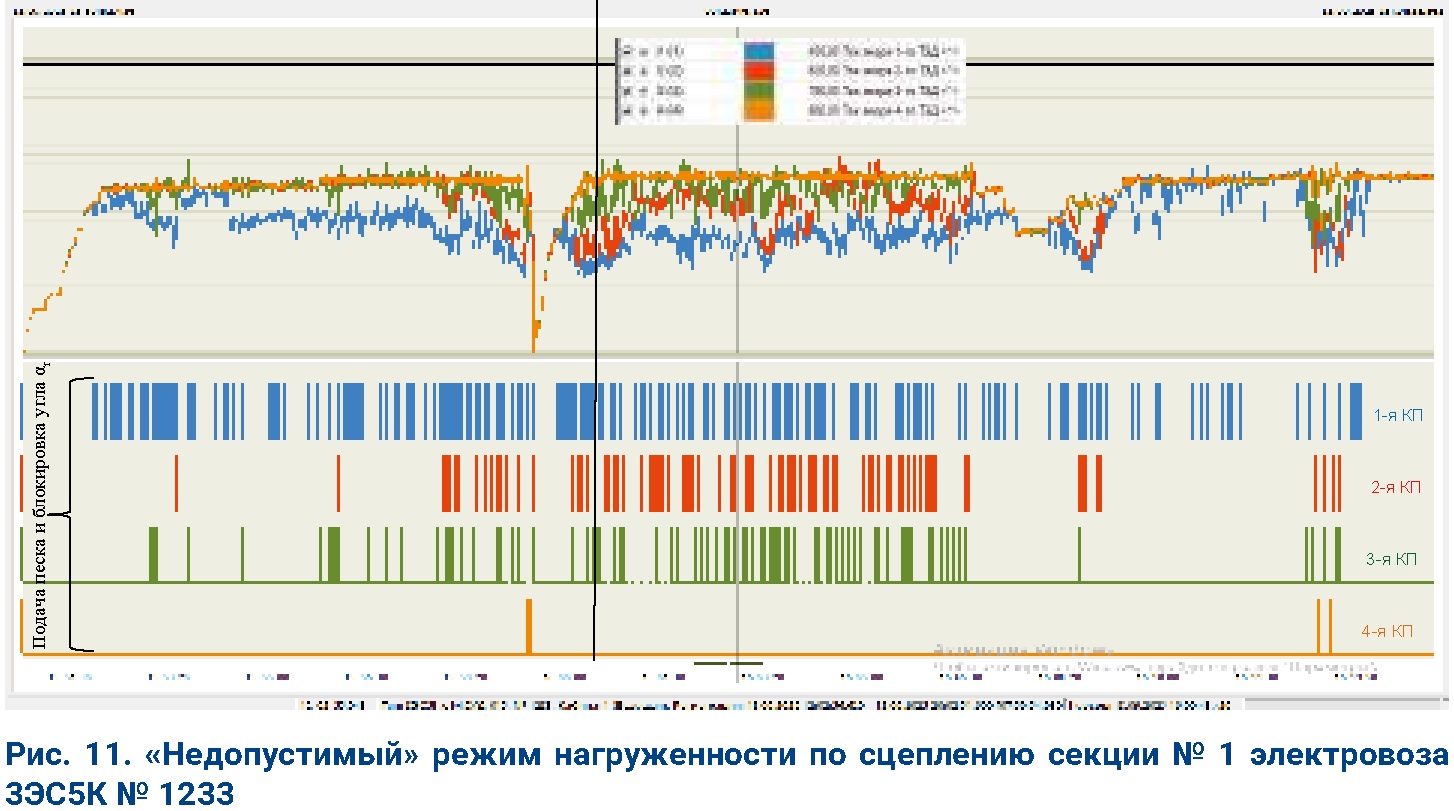 Такая система будет определять и поддерживать максимальный ток ТЭД (силу тяги) отдельно для каждой колесной пары на том уровне, при котором не будут превышены граничные показатели процессов их проскальзывания. Взаключение следует отметить, что микропроцессорная система управления тягой должна учитывать аналоговые сигналы, поступающие из различных источников всего электровоза. В своей работе она должна учитывать и сравнивать значения тока, напряжения ТЭД, скоростей вращения колесных пар всех секций электровоза с применением адекватных реакций по регулированию тяги, а также выдачи оповещений локомотивной бригаде об отказах оборудования с отображением рекомендаций на дальнейшие действия. Нужно понимать, что в процессе сервисного обслуживания локомотивов имеется проблема в подборе ТЭД по электромеханическим характеристикам, а также колесных пар в соответствии с требованиями конструкторской документации для электровозов 2ЭС5К, 3ЭС5К с разностью диаметров бандажей по кругу катания у комплекта колесных пар, подкатываемых под электровоз, не более 8 мм. 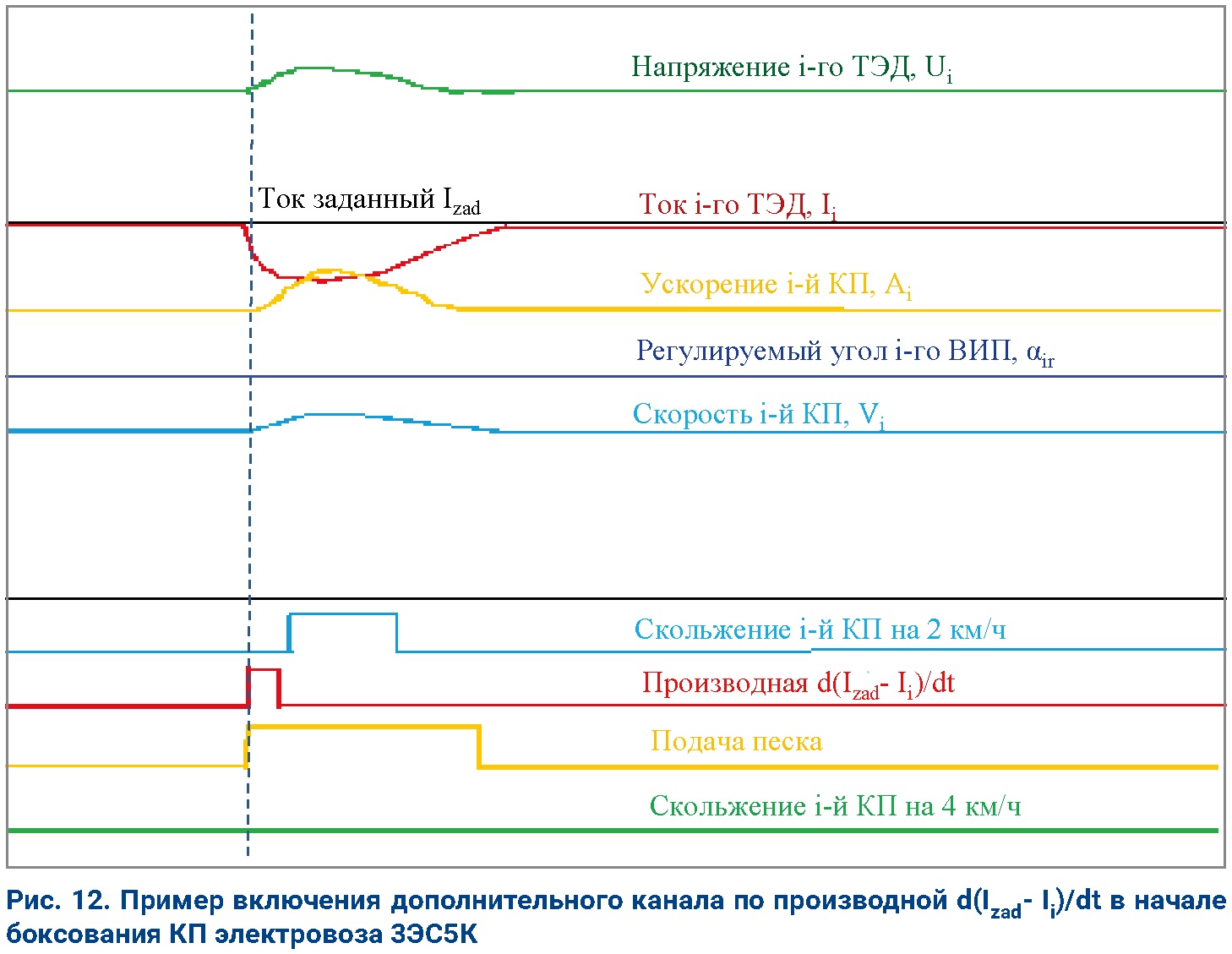 В этой ситуации, чтобы исключить отработку алгоритмов ложного восприятия боксования из-за несоответствия электромеханических характеристик колесно-моторных блоков (КМБ), а также обеспечивать правильное распределение тяги по осям колесных пар, МСУД электровоза нужно научить производить процедуры калибровки параметров работы КМБ в процессе эксплуатации по параметрам скорости движения от датчиков ДПС, а также тока и напряжения ТЭД. Процессы калибровки предлагается запускать как автоматически, так и по запросу машиниста локомотива. Например, во время движения на выбеге без применения вспомогательного тормоза локомотива (выполняется калибровка датчиков ДПС), в режиме тяги, в условиях движения гарантированного отсутствия боксования. В результате проведенной калибровки МСУД должна уметь пользоваться поправочными коэффициентами и учитывать их в решениях тяговых задач во время движения поезда. Предлагаемые меры дополнительно повысят надежность локомотивов 2(3)ЭС5К «Ермак», что позволит исключить случаи повреждения колесно-моторных блоков, железнодорожного пути, а также снизить количество отказов, тяжесть их последствий и время задержек в графике движения поездов. Библиография1. Голов Ю.В. Повышение эффективности тяги локомотивов на примере электровоза 2ЭС5 // Техника железных дорог. 2016. № 4 (36). С.67 — 69. 2. Технические требования к программному обеспечению МСУД электровозов 2ЭС5К, 3ЭС5К и 4ЭС5К с внедрением системы поосного регулирования и с усовершенствованной системой бортовой диагностики. Версия G6 (9.11.2021 г.). 159 с. 3. Правила тяговых расчетов для поездной работы, утвержденные распоряжением ОАО «РЖД» от 12 мая 2016 г. № 867р (в ред. от 26.12.2024 г.). От редакции. Когда данная статья была получена редакцией, стало известно, что ушел из жизни д-р техн. наук, Почетный железнодорожник Ю.В. Голов. Более 65 лет Юрий Владимирович проработал на различных должностях Свердловской, Томской, Западно-Сибирской и Кемеровской железных дорог, в Проектно-конструкторском бюро локомотивного хозяйства — филиале ОАО «РЖД». Прошел путь от помощника машиниста электровоза до заместителя начальника железной дороги. Под руководством Ю.В. Голова был проведен ряд испытаний локомотивов (в том числе электровозов «Ермак»), оказавших большое влияние на развитие железнодорожного машиностроения в России. Редакция журнала «Локомотив», редколлегия и редсовет выражают глубокие соболезнования родным и близким. Светлая память о Юрии Владимировиче навсегда останется в наших сердцах! |
|
|
Цитировать 14 |
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| [01-2026] Анализ эффективности эксплуатации грузовах электровозов на Восточном полигоне по данным АСОУП | Admin | xx2 | 0 | 20.02.2026 15:15 |
| [01-2023] Электрическая схема электровоза типа ЭС5К «ЕРМАК» | бабулер83 | xx2 | 3 | 24.12.2023 06:50 |
| [06-2022] Проблемы эксплуатации локомотивов новых серий в периоды низких температур и их решения | Admin | xx2 | 0 | 04.12.2022 18:17 |
| [10-2019] Особенности электровозов серии «ЕРМАК» с поосным регулированием силы тяги | Admin | xx2 | 0 | 30.11.2019 07:26 |
| [02-2019] Схемы пневматического оборудования электровозов серии ЭС5К «ЕРМАК» | Admin | xx2 | 0 | 15.03.2019 20:23 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|










