



|
|
|
|
#1 (ссылка) |
|
Crow indian







Регистрация: 21.02.2009
Возраст: 41
Сообщений: 30,456
Поблагодарил: 398 раз(а)
Поблагодарили 6048 раз(а)
Фотоальбомы:
2624 фото
Записей в дневнике: 905
Репутация: 126141
|
Тема: [10-2024] Системы автоматического управления скоростью поездаСистемы автоматического управления скоростью поезда Н.О.ЖУХИН, заведующий лабораторией «Электроподвижной состав», В.П. ОБУХОВ, канд. техн, наук, доцент, РУТ (МИИТ) Возросший объем грузовых перевозок железнодорожным транспортом в последние годы требует повышения как пропускной, так и провозной способностей ряда участков железных дорог [1]. Одним из способов повышения пропускной способности является увеличение числа пар поездов. Однако при приближении пропускной способности к максимально возможной ухудшаются основные показатели качества работы железнодорожных линий. Снижается средняя скорость движения, возрастает время доставки грузов и оборота вагонов, могут возникать сбои в движении поездов. Согласно [1,4 — 9], при заполнении пропускной способности железнодорожного участка более 70 % участковая скорость резко снижается: при повышении пропускной способности на 1 % она может снизиться на 2,5 — 3 %. Другой способ повышения пропускной способности — строительство дополнительных главных путей — связан со значительными экономическими затратами. В условиях роста объема грузовых перевозок для стабилизации размеров движения на грузонапряженных участках железных дорог возможно повышать провозную способность этих участков путем увеличения массы поезда. Примером эффективности этого способа являются мероприятия по повышению средней массы грузового поезда, проводившиеся в СССР в 1979 —1983 гг. [2,14,15]. Так, в результате их внедрения на 2 — 4 % сократилось количество поездов, был ускорен оборот вагонов, повысилась участковая скорость. Повышение массы поездов требует применения более совершенных локомотивов, способных реализовать большую силу тяги, а значит, имеющих большую мощность. При этом критичным параметром для повышения массы составов является именно сила тяги локомотива. Это достигается путем увеличения числа движущих осей локомотива или увеличения осевой нагрузки локомотива. В результате одновременного повышения массы поезда и силы тяги локомотива возрастают возникающие в поезде продольные силы, в том числе продольные динамические силы в переходных режимах движения поезда (например, при трогании с места, на переломе профиля пути). Такие силы могут достигать значений, достаточных для схода вагонов с рельсов, обрыва либо саморасцепа автосцепок под действием как растягивающих, так и сжимающих продольных сил [3,16]. Вероятность обрыва автосцепки с повышением массы поезда возрастает. Так, согласно [17], более 60 % обрывов автосцепок приходится на поезда массой более 6000 т. Вероятность обрыва автосцепки зависит и от ее технического состояния, которое определяется возрастом подвижного состава, качеством обслуживания и ремонта. Под действием возросших продольных динамических сил, многократно повторяющихся в переходных режимах движения, а также при наличии в поезде неисправных поглощающих аппаратов в автосцепках накапливаются усталостные повреждения. Превышение допустимых скоростей роспуска вагонов на сортировочных горках или ухудшение состояния поглощающих аппаратов приводит к соударениям вагонов друг о друга, в результате возникают изгиб хвостовиков автосцепок, трещины в хвостовиках и тяговых клиньях, что также повышает вероятность обрыва автосцепок. Следствием всех этих факторов является уменьшение среднего срока службы автосцепных устройств [18] и рост числа случаев обрыва автосцепок [17]. К повреждениям подвижного состава, в том числе автосцепок, приводят и нерациональные действия локомотивных бригад, особенно в процессе управления грузовыми поездами повышенной массы и длины [19]. Так, при трогании поезда и быстром повышении силы тяги локомотива возрастает вероятность обрыва автосцепки в первой трети поезда [3]. Она значительно повышается при наличии в поезде вагонов с неотпущенными тормозами или с поглощающими аппаратами, находящимися в растянутом состоянии. Это объясняется появлением растягивающей динамической силы значительной величины в автосцепке между вагонами, которые уже пришли в движение, и заторможенной (либо растянутой) частью поезда. Возникающая при этом динамическая сила может превысить допустимую величину [20], поскольку зависит как от степени деформации поглощающих аппаратов, так и от относительной скорости перемещения центров масс соседних вагонов [3,21]. Обрыв автосцепок возможен не только в головной, но и в средней и хвостовой частях поезда. В результате деформаций поглощающих аппаратов и наличия зазоров в автосцепках вдоль поезда распространяются прямые и обратные волны упругого сжатия и растяжения. Эти волны могут накладываться друг на друга, и в результате сложения колебаний их амплитуда возрастает до величины, превышающей максимально допустимое значение, что приводит к обрыву автосцепок в средней части поезда. Причинами обрыва автосцепки в хвосте поезда могут быть наличие заторможенной группы вагонов, размещение вагонов большой массы в хвосте поезда, неисправность поглощающих аппаратов, наложение волн растяжения и сжатия поезда. Необходимо отметить, что нерациональный выбор режима управления поездом (например, ошибочный выбор темпа роста силы тяги при трогании поезда с места) далеко не во всех случаях приводит к обрыву автосцепок, но может ускорить накопление усталостных повреждений и появление усталостных трещин, повышая вероятность обрыва автосцепки в дальнейшем. Поэтому для снижения влияния человеческого фактора на возникающие в поезде продольные силы управление грузовым поездом целесообразно комплексно автоматизировать. Различные системы автоматического управления подвижным составом разрабатываются и создаются в нашей стране с 1960-х годов. К ним относятся автоматические системы отдельных узлов подвижного состава [22], системы автоматического управления САУ [22, 26], системы автоведения поездов САВП [22]. В настоящее время благодаря широкому распространению микропроцессорных систем управления (МПСУ) разработаны и успешно эксплуатируются системы автоматического управления скоростью, системы автоведения для пассажирских и грузовых локомотивов (в том числе грузовых локомотивов с системой распределенной тяги), моторвагонных поездов. В нашей стране и за рубежом ведутся разработки беспилотных систем автоведения. По сравнению с автоматическими системами, созданными на основе аналоговых электронных элементов и цифровых дискретных схем, современные МПСУ являются намного более эффективными и надежными. Кроме того, микропроцессорные системы позволяют осуществлять гораздо более сложные алгоритмы управления без усложнения аппаратной части системы, выполнять намного больший объем вычислений, хранить значительный объем информации и выводить ее в удобном для оператора виде. Микропроцессорная техника позволяет создавать эффективные системы управления сложными техническими объектами, например, длинносоставным грузовым поездом с несколькими локомотивами. Благодаря развитию МПСУ на современных локомотивах широко используются плавное регулирование силы тяги и тяговый привод с асинхронными тяговыми двигателями. Современные микропроцессорные системы автоматического управления скоростью и автоведения поездов позволяют автоматически выбирать наиболее рациональные режимы движения поезда, эффективнее использовать возможности локомотивов, экономить топливо-энергетические ресурсы, повышать массу и длину поезда без увеличения числа локомотивных бригад, снижать напряженность работы машиниста. Это обеспечивает повышение безопасности движения поездов, пропускной способности существующих линий, экономической эффективности железнодорожного транспорта. 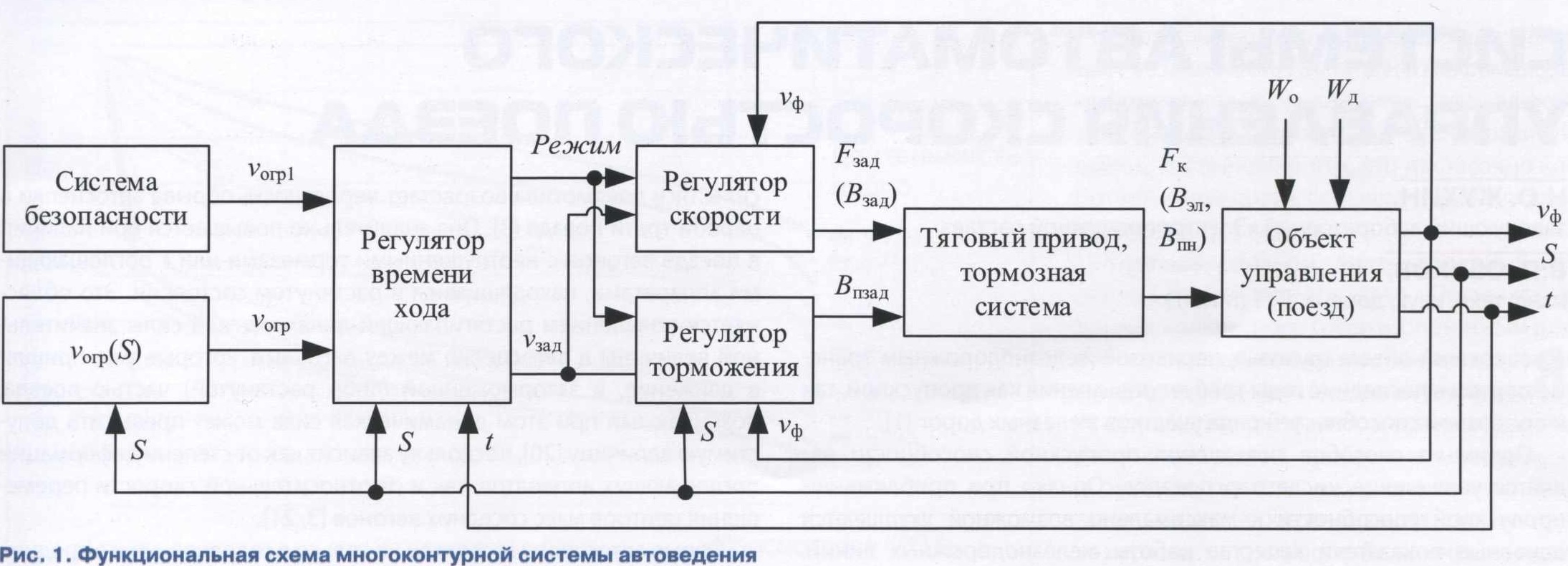 Таким образом, с целью повышения безопасности движения и экономической эффективности применения грузовых поездов (в том числе поездов повышенной массы и длины) в управление поездами целесообразно внедрять САУ соответствующего уровня. Для обеспечения безопасности движения поездов, минимизации износа пути и подвижного состава, а также экономической эффективности перевозок система автоматического управления скоростью грузового поезда должна учитывать как параметры поезда (массу, число вагонов, их расположение и т.д.), так и параметры его движения (скорость движения, расположение на элементах профиля пути и т.д.). Как уже было сказано, с целью повышения безопасности движения, а также пропускной и провозной способности железных дорог на локомотивах грузовых поездов целесообразно применение систем автоматического управления САУ и систем автоведения поездов САВП [33]. Системы автоведения поездов классифицируют по различным признакам (по уровню централизации, количеству контуров управления и т.д.). Так, по уровню централизации САВП могут быть централизованными и автономными [26]. Централизованные системы автоведения позволяют управлять несколькими поездами одновременно. Такое управление осуществляется на основе алгоритма управления движением поездов, заложенного в систему, и параметров движения, получаемых системой от всех поездов на данном участке. На основе этих данных система передает команды управления каждому поезду. Часть оборудования централизованных САВП устанавливают на стационарном посту управления, часть — на подвижном составе. Ряд централизованных САВП был разработан и успешно внедрен на различных линиях как в нашей стране, так и за рубежом [23, 25, 26]. Согласно работе [27], применение таких систем целесообразно и на наземных городских железных дорогах. Автономные САВП управляют, как правило, только одним поездом [22,26, 33,34]. На основе расписания движения поезда, параметров движения и ряда ограничений (ограничений скорости, тяговых характеристик и т.д.) такие системы вырабатывают управляющее воздействие на тяговые и тормозные средства поезда. Взаимодействие нескольких поездов между собой осуществляется косвенно через систему автоблокировки. Все оборудование автономной САВП может быть установлено на подвижном составе. Примером такой системы является унифицированная система автоматического ведения поезда УСАВП, применяемая на различном отечественном подвижном составе [34]. По количеству контуров управления (то есть, по количеству одновременно регулируемых физических величин) САВП подразделяют на одноконтурные и многоконтурные. Одноконтурные системы автоведения были разработаны для подвижного состава со ступенчатым регулированием напряжения на тяговых двигателях. Основой таких систем автоведения является регулятор времени хода. Он сравнивает заданное и фактическое времена хода и на основе величины их рассогласования вычисляет необходимую позицию управления локомотивом. В многоконтурных системах автоведения используются, как минимум, два контура: управляющий внешний и подчиненный ему внутренний. Во внешнем контуре — регуляторе времени хода — в зависимости от величины рассогласования заданного и фактического времени хода формируется значение заданной скорости. В свою очередь, внутренний контур, в зависимости от рассогласования заданной и фактической скоростей, управляет тяговыми либо тормозными средствами поезда. Функциональная схема многоконтурной САВП приведена на рис. 1. При создании регулятора скорости для грузового поезда необходимо учитывать ряд особенностей, характерных для такого поезда как объекта управления. При движении поезда продольные силы, возникающие в нем при взаимодействии его экипажей, не должны превышать допустимых значений [29]. Кроме того, необходимо предусматривать возможность управления поездом с несколькими локомотивами. Разработка отечественных регуляторов скорости электровозов и электропоездов осуществлялась во ВНИИЖТе [29], ГТСС [10], МИИТе [11,20], ПГУПСе [21], РВЗ [22], УЭМИИТе [23]. По особенностям управления данные регуляторы скорости можно разделить на регуляторы со ступенчатым (контакторным) регулированием силы тяги и плавным (бесконтактным) регулированием. Регуляторам скорости ЭПС с реостатно-контакторными системами управления посвящены исследования И.А. Асниса, Я.М. Головичера, А.В. Плакса, М.С. Пясика, А.Н. Савоськина, В.П. Феоктистова [21,25,31 ]. Так, в работе [24] Л.А. Баранов, Я.М. Головичер и И.А. Аснис рекомендуют использовать дополнительный критерий качества для таких систем — обеспечение минимального числа переключений силовой схемы при допустимых погрешностях управления. Определение оптимальных параметров для регулятора скорости (его параметрический синтез) в данной работе осуществлялось методом оптимизации коэффициентов нелинейного закона управления. Одно из направлений разработки таких регуляторов скорости — использование в их работе эвристических алгоритмов. Эти алгоритмы использовались в регуляторе скорости электропоезда ЭР200, разработанном в институте Гипротранссигналсвязь (ГТСС) [20, 24], а также в регуляторе скорости для пассажирских электровозов ЧС2 и ЧС4 со ступенчатым регулированием силы тяги [29]. Регуляторам скорости ЭПС с плавным (бесконтактным) регулированием силы тяги также посвящен ряд работ [27, 28]. Так, Л.А. Барановым [28] были предложены различные модели САУ скоростью ЭПС с плавным регулированием силы тяги, рассмотрены методы синтеза этих систем и определения параметров регуляторов скорости. Исследование [27] А.Н. Савоськина, О.Е. Пудовикова и др. посвящено разработке регулятора скорости электропоезда. Параметры данного регулятора также определялись методом параметрического синтеза. Были приняты следующие допущения: использовалась линеаризованная модель поезда, не учитывались каналы измерений и дискретизация по времени. В работе [20] О.Е. Пудовиков методами имитационного моделирования исследовал продольные колебания, происходящие в грузовом поезде. По результатам исследования был разработан регулятор скорости для грузового электровоза с асинхронными тяговыми двигателями. Данный регулятор обеспечивал плавное изменение силы тяги (силы торможения), ограничивая возникающие в поезде продольные динамические силы. Отдельные регуляторы скорости и САУ скоростью целесообразно рассмотреть подробнее. Первые регуляторы скорости создавались для ЭПС со ступенчатым регулированием напряжения на тяговых двигателях. Примером такого регулятора является регулятор скорости, применявшийся в двухконтурной системе автоведения на пассажирских электровозах серий ЧС2 и ЧС4 [24,25]. Он использовался в качестве внутреннего контура САВП. Параметры данного регулятора скорости (период работы и ширина зоны нечувствительности) регулятора определялись методом параметрического синтеза [24]. При этом в качестве критерия качества управления было выбрано минимальное среднеквадратичное отклонение скорости в режиме стабилизации скорости. На скоростных пассажирских электровозах ЧС200 использовалась САУ скоростью типа ARR-200, разработанная в Чехословакии [23]. В ее регуляторе скорости был реализован алгоритм управления, аналогичный алгоритму регулятора скорости электровозов ЧС2 и ЧС4. Данная система в режиме ручного управления могла поддерживать скорость, заданную машинистом с клавиатуры, а в режиме автоматического управления система поддерживала скорость, заданную вышестоящей системой автоведения. Серийно выпускаемый в настоящее время пассажирский электровоз постоянного тока ЭП2К с коллекторными тяговыми двигателями оборудован микропроцессорной системой управления МПСУ, осуществляющей управление всем тяговым оборудованием электровоза. Данная система включает в себя САУ скоростью, обеспечивающую разгон электровоза с поддержанием заданного тока тяговых двигателей до заданной скорости. После достижения заданной скорости МПСУ выключает тяговые двигатели, переводя электровоз в режим выбега. Движение на выбеге происходит до тех пор, пока рассогласование фактической и заданной скоростей движения не составит от 2 до 5 км/ч. При превышении этого порога рассогласования осуществляется повторный разгон до заданной скорости движения. В составе МПСУ электровоза ЭП2К имеется также подсистема автоведения, взаимодействующая с САУ скоростью. В настоящее время ряд электровозов со ступенчатым регулированием силы тяги (ВЛ 10, ВЛ 11, ЧС7 и др.) оборудован унифицированной микропроцессорной системой автоведения поезда УСАВП, составной частью которой также является регулятор скорости, реализованный в виде ряда алгоритмов системы автоведения. Так, в системе УСАВП на электровозе ЧС7 [28] регулятор скорости осуществляет разгон электровоза с заданным ускорением до скорости, заданной системой автоведения (расчетная скорость либо скорость ограничения). Далее регулятор, переключая позиции контроллера машиниста, поддерживает заданную скорость движения электровоза, не выходя за пределы коридора скоростей, ширина которого (фактически, ширина зоны нечувствительности регулятора скорости) задается машинистом для различных диапазонов скоростей. При необходимости в работу включается тормозной регулятор, управляющий тормозами локомотива и поезда. Регуляторы такого типа неприменимы на локомотивах с плавным регулированием силы тяги, поскольку они разработаны для электровозов со ступенчатым регулированием. Кроме того, некоторые из этих регуляторов скорости, разработанные для пассажирских локомотивов, не учитывают динамические процессы, происходящие в поезде, и поэтому не могут использоваться на грузовых локомотивах. На ряде отечественных электровозов с коллекторными тяговыми двигателями (ВЛ85, ЭП1, ЭП1М, 2ЭС5К, ЗЭС5К, 4ЭС5К) и с асинхронными тяговыми двигателями (2ЭС10, 2ЭС7, ЗЭС8, ЭП20) реализовано плавное регулирование силы тяги путем плавного бесконтактного регулирования напряжения на тяговых электродвигателях (ТЭД). Такое регулирование обеспечивают полупроводниковые тяговые преобразователи на тиристорах или IGBT-модулях. Преобразователями управляет микропроцессорная система управления, включающая многоконтурную САУ, внешним контуром которой является контур скорости, а внутренним — контур управления тяговым электроприводом. Различные существующие САУ скоростью электроподвижно-го состава с плавным регулированием напряжения на ТЭД рассмотрены в [23,25,27,32]. Одна из первых отечественных САУ скоростью для ЭПС с плавным регулированием силы тяги была серийно применена на электровозе ВЛ85. На каждой секции данного электровоза установлены шесть тяговых двигателей, которые получают питание от трех вторичных обмоток тягового трансформатора через три тиристорных выпрямительно-инверторных преобразователя ВИП. Управление этими преобразователями осуществляют блок автоматического управления током и скоростью БАУ и блок управления выпрямительно-инверторными преобразователями БУВИП [27,29]. Структура САУ электровоза ВЛ85 зависит от выбранного режима — тяга или электрическое торможение [29]. В режиме тяги это двухконтурная система с селективно-подчиненным регулированием. Внешним контуром этой системы является контур регулирования скорости движения, внутренним — контур регулирования тока ТЭД. Такая структура обеспечивает разгон электровоза до заданной скорости с заданной величиной тока ТЭД. В режиме стабилизации скорости регулятор скорости PC формирует заданное значение тока ТЭД, которое поступает в регулятор тока, осуществляющий управление ВИП. В режиме электрического торможения данная САУ является трехконтурной. Внешним контуром также является контур регулирования скорости, внутренними контурами — контуры регулирования тока якоря и тока возбуждения ТЭД. Один из основных недостатков рассмотренной САУ (как и аналогичной САУ, используемой на электровозах ВЛ65) — достаточно быстрое снижение тока ТЭД при переходе от режима разгона к режиму стабилизации скорости [20]. Это вызывает «набегание» вагонов на электровоз и возникновение в поезде значительных продольных динамических сил. Второй недостаток данной САУ — наличие зоны нечувствительности регулятора скорости: после разгона до заданной скорости и уменьшения тока ТЭД регулятор снова увеличивает ток двигателей только после снижения скорости на 5 — 10 км/ч. Еще одним недостатком данной системы является отсутствие автоматического перехода из тяги в режим торможения в процессе стабилизации скорости, что допускает возможность превышения заданной машинистом скорости при движении по крутому спуску. С середины 1980-х годов в отечественном электровозостроении наметился переход от аналоговых к микропроцессорным системам управления [22]. Как уже было сказано, применение микропроцессорных систем управления (МПСУ) вместо аналоговых позволяет реализовывать намного более сложные и совершенные алгоритмы управления. Обновление алгоритмов управления микропроцессорных САУ возможно без изменения аппаратной части системы управления — благодаря изменению управляющей программы. Другими преимуществами современных МПСУ перед аналоговыми системами управления являются повышение надежности, уменьшение массы и габаритов системы управления, улучшение диагностики подвижного состава. Поэтому все современные локомотивы (как отечественные, так и зарубежные) оборудованы МПСУ. Микропроцессорные системы управления ряда современных грузовых электровозов позволяют в режиме распределенной тяги управлять по радиоканалу несколькими локомотивами, распределенными по составу. Это обеспечивается как программной, так и аппаратной составляющими систем (например, возможностью подключения радиомодема). На ЭПС с плавным регулированием силы тяги САУ скоростью в составе МПСУ впервые была применена на отечественном электровозе серии ЭП1. В МИИТе на кафедре «Электрическая тяга» был разработан усовершенствованный вариант этой микропроцессорной САУ, позволяющий учитывать массу и число вагонов поезда. Для этого в новой САУ был предусмотрен задатчик параметров поезда ЗПП в виде дисплея и клавиатуры на пульте управления для ввода в САУ информации о массе вагонов и их числе. Регулятор скорости данной САУ имеет обратную связь как по скорости, так и по ускорению, причем коэффициент обратной связи по ускорению вычисляется на основе введенных машинистом параметров поезда. В данной САУ исправлен ряд недостатков САУ электровоза ВЛ85. В то же время недостатками новой системы являются значительные колебания тока якоря ТЭД в режиме стабилизации скорости и невозможность выбора оптимальных параметров регулятора скорости для любых параметров поезда. Это снижает показатели качества САУ и препятствует ее применению в качестве универсальной. Учеными МИИТа разработана микропроцессорная система автоматизированного управления (САУ) скоростью скоростного электропоезда с плавным регулированием силы тяги [27]. Эта система обеспечивает разгон (либо торможение) электропоезда с заданным ускорением (замедлением) до заданной скорости с последующей стабилизацией этой скорости независимо от действующих на поезд сил сопротивления движению. При разгоне и торможении поезда, а также в переходных режимах движения обеспечивается необходимая плавность хода (производная по времени от ускорения либо замедления), что достигается применением задатчика интенсивности ЗИ, обеспечивающего плавное увеличение (уменьшение) значения заданной скорости до величины, заданной машинистом (системой автоведения). Также САУ обеспечивает необходимые ограничения тяговых и тормозных характеристик поезда, в том числе ограничения по условиям работы тягового электропривода. Особенностью системы является быстродействующий регулятор скорости, в основе которого находятся пропорциональноинтегральный регулятор и элемент с зоной нечувствительности, обеспечивающий изменение силы тяги (торможения) только при определенной величине рассогласования заданной и фактической скоростей. В работе [27] также приведены результаты исследований данной САУ, которые показывают, что эта система не учитывает возможность изменения массы поезда, поэтому при изменении массы поезда наблюдается ухудшение показателей качества управления. Поскольку система разработана для электропоездов, она неприменима для локомотивов. Так, при трогании поезда с локомотивом, оборудованным подобной САУ, в поезде возникают слабозатухающие продольные колебания с достаточно большой амплитудой. При наличии дополнительных возмущений (смена режима движения, изменение профиля пути и т.д.) в поезде возникают дополнительные продольные колебания, что ухудшает как показатели качества управления САУ, так переходные процессы в поезде. Поэтому для локомотивов грузовых поездов кафедрой «Электрическая тяга» была разработана САУ скоростью, учитывающая особенности грузового поезда как объекта управления [10]. Данная САУ, используя параметры грузового поезда, введенные в нее машинистом, обеспечивает необходимое качество управления скоростью движения в переходных режимах благодаря применению специального алгоритма разгона (торможения) поезда, осуществляемого в два этапа. На первом этапе САУ осуществляет предварительное растяжение (сжатие) поезда с уменьшенным ускорением (замедлением). Это обеспечивает более плавный выбор зазоров в межвагонных соединениях поезда, а следовательно, уменьшение величин продольных динамических сил. После растяжения (сжатия) поезда САУ увеличивает силу тяги (торможения), осуществляя разгон (торможение) поезда до заданной скорости с максимальным ускорением (замедлением). Расчет величины заданного ускорения САУ осуществляет перед началом движения на основе параметров поезда (массы и числа вагонов). В работе [10] показано, что применение такой системы уменьшает как динамические, так и квазистатические продольные силы, возникающие в поезде. Тем самым снижается вероятность обрыва автосцепок поезда, уменьшается износ межвагонных связей и механической части экипажей поезда. Также в МИИТе была разработана САУ скоростью для управления локомотивами длинносоставного грузового поезда с распределенной тягой, рассмотренная в [25]. Данная САУ осуществляет оценку величин продольных сил, возникающих в поезде, используя эталонную модель грузового поезда. На основе данной модели САУ оценивает величины показателя качества — коэффициента устойчивости против схода с рельсов — для каждого экипажа. Если величина коэффициента устойчивости какого-либо экипажа выходит за допустимые пределы, САУ осуществляет коррекцию заданной скорости либо ускорения одного из локомотивов поезда с целью восстановления величины коэффициента устойчивости до допустимой. Рассмотренная САУ также определяет параметры системы управления на основе параметров поезда (массы и числа вагонов). Одним из недостатков данной системы является достаточно сложная структура и необходимость выполнения в режиме реального времени большого объема вычислений. Кроме того, в данной САУ рассматривается торможение поезда только с помощью электродинамического тормоза локомотива. На отечественных электровозах постоянного тока 2ЭС6 «Синара» и 2ЭС10 «Гранит» используется микропроцессорная система управления и диагностики — МПСУиД [31, 32]. Эта система обеспечивает управление тяговым электроприводом в режимах автоведения и ручного управления, а также контроль за состоянием оборудования локомотива. В режиме ручного управления данная система выводит машинисту рекомендации по рациональному управлению поездом. 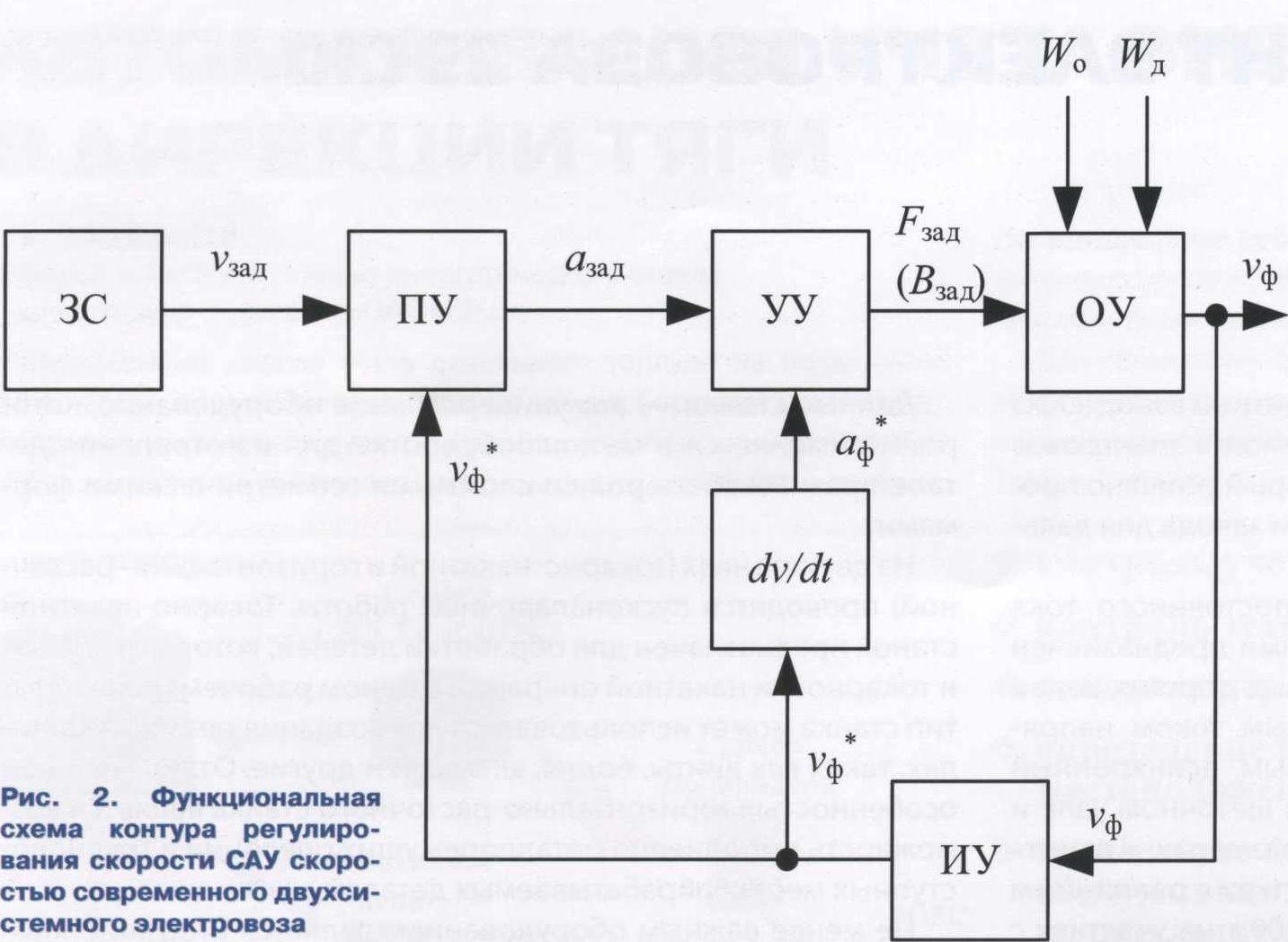 Электровозы постоянного тока 2ЭС6 «Синара» оборудованы коллекторными тяговыми двигателями с независимым возбуждением в режимах тяги и электрического торможения. Управление всем силовым оборудованием электровоза, в том числе статическим преобразователем плавного регулирования тока обмоток возбуждения ТЭД, осуществляется с помощью МПСУиД [31]. Независимое возбуждение ТЭД в режиме тяги с плавным регулированием тока возбуждения значительно улучшает защиту электровоза от боксования, упрощает переход в режим электрического торможения, а также позволяет сглаживать броски тока и силы тяги в процессе пуска двигателей, что несколько снижает величины продольных сил в поезде. Электровоз оборудован встроенной системой автоведения, реализованной в виде подсистемы, представляющей собой третий (высший) уровень МПСУиД. Система автоведения в режиме «Автоведение» позволяет автоматически вести поезд с учетом действующего расписания, сигнала светофора, постоянных и временных ограничений скорости, параметров поезда, пути и профиля. В этом режиме подсистема автоведения осуществляет разгон либо торможение электровоза до расчетной скорости, а также поддержание расчетной скорости. Значительный интерес представляет САУ скоростью, используемая на отечественных электровозах переменного тока 2ЭС5К и ЗЭС5К «Ермак», ее рассмотрим в отдельной статье. Электровоз постоянного тока 2ЭС10 с асинхронными тяговыми двигателями может работать в автоматическом и ручном режимах, а также в режиме автоведения, которые реализуются с помощью МПСУиД [32]. В ручном режиме электровоз реализует силу тяги (торможения), величина которой задается машинистом. В автоматическом режиме управление электровозом осуществляется с помощью САУ скоростью, представляющей собой часть программного обеспечения МПСУиД. В этом режиме САУ скоростью осуществляет разгон электровоза до заданной машинистом скорости с заданной силой тяги. В автоматическом режиме осуществляется соблюдение ограничений по мощности и ускорению, а до выхода на ограничение по мощности максимальная сила тяги поддерживается системой на уровне 538 кН, что ниже предельной тяговой характеристики. Для выхода на предельную тяговую характеристику предусмотрен так называемый «бустерный» (предельный) режим. По мере приближения к заданной скорости сила тяги плавно уменьшается до уровня, необходимого для стабилизации заданной скорости. Если фактическая скорость движения становится выше заданной, САУ автоматически переходит в режим электрического торможения. В этом режиме также осуществляется управление с соблюдением ограничений по мощности, сцеплению и ускорению. В зависимости от уровня напряжения в контактной сети САУ реализует рекуперативное либо реостатное электрическое торможение. По мере приближения фактической скорости к заданной скорости сила торможения также уменьшается до уровня, необходимого для стабилизации заданной скорости. Автоматический переход в режим торможения в процессе стабилизации скорости, реализованный благодаря асинхронному тяговому приводу, является важным преимуществом данной САУ, снижающим напряженность труда машиниста и повышающим безопасность движения. Двухсистемные электровозы оборудованные асинхронными тяговыми двигателями и разработанные с участием компании Bombardier Transportation, оборудованы МПСУ типа MITRAC TCMS [30]. Рассмотрим функциональную схему САУ современного двухсистемного электровоза на примере контура регулирования скорости (рис. 2). Заданное значение скорости узад формируется задающим устройством ЗУ — контроллером машиниста, системой автоведения или системой безопасности, исключающей задание скорости выше допустимой. Промежуточное устройство ПУ определяет рассогласование значений заданной v3afl и фактической скоростей движения Уф*. На основе этого рассогласования оно рассчитывает значение заданного ускорения азад. Значения заданного и фактического ускорений поступают в устройство управления УУ, представляющее собой ПИ-регулятор. Он определяет значение заданной силы тяги (торможения) F3afl (Взад) для объекта управления ОУ — асинхронного тягового электропривода. Библиография 1. Транспорт в России. 2022: Стат. сбУРосстат. — М., 2022. —101 с. 2. Вершинский, С.В. Динамика вагона: учебник для вузов ж.-д. транспорта / С.В. Вершинский, B.H. Данилов, И.И. Чесноков. — Изд. 3-е, перераб. и доп. — М.: Транспорт, 1991. — 360 с. 3. Блохин, Е.П. Динамика поезда (нестационарные продольные колебания) / ЕЛ. Блохин, Л.А. Манашкин. — М.: Транспорт, 1982. — 222 с. 4. Канарская, А.А. Проблема повышения провозной способности железнодорожных линий и пути ее решения / А.А. Канарская, Т.П. Жабров, В.А. Шаров // Основные требования к параметрам особо грузонапряженных линий: Сб. науч. тр. — Транспорт, 1988. — С. 4 — 9. 5. Макарочкин, А.М. Использование и развитие пропускной способности железных дорог / А.М. Макарочкин, Ю.В. Дьяков. — М.: Транспорт, 1981. — 287 с. 6. Кулаев, К.В. Повышение веса и скорости грузовых поездов в свете решения проблем провозной и пропускной способности железных дорог / К.В. Кулаев // Повышение веса и скорости движения поездов. — Транспорт. — 1984. — С. 1 — 3. 7. Баранов, А.М. Развитие пропускной и провозной способности однопутных линий / А.М. Баранов, В.Е. Козлов, Э.Д. Фельдман // Труды ЦНИИ МПС, Вып. 268. — М.: Транспорт, 1964. — 133 с. 8. Нестационарные режимы тяги (Тяговое обеспечение перевозочного процесса) / Лисицын АЛ., Мугинштейн Л.А. / Под ред. Г.И. Нарских, И.К. Петушковой. — М.: Интекст, 1996. — 159 с. 9. Фельдман, Э.Д. Эффективность применения кратной тяги поездов на грузонапряженных магистралях / Э.Д. Фельдман // Вестник ВНИИЖТ. —1981. — № 7. — С. 1 — 4. 10. Бушуев, С.В. Повышение пропускной способности участка железной дороги с применением технологии виртуальной сцепки / С.В. Бушуев, К.В. Гундырев, Н.С Голочалов // Автоматика на транспорте. — 2021. — № 1. — С. 7 — 20. 11. Климова, Е.Е. Технология виртуальной сцепки поездов как инструмент повышения пропускной и провозной способности линии / Е.Е. Климова, Л.Е. Пилинушка, В.С. Рябов //Транспортная инфраструктура сибирского региона: Материалы десятой Международной научно-практической конференции.— 2019.— С. 60 — 64. 12. Абрамов А.А., Андросюк К.В. Имитационное моделирование наличной пропускной способности // Железнодорожный транспорт. 2013. № 11. С. 28 — 31. 13. Lingaitis LP, VaiciOnas G, Liudvinavicius L et al (2013) Methods of calculation line optimum travel of trains with consideration of longitudinal dynamic efforts. Transport Prob 8(2):25-34 14. Паристый, ИЛ. Комплексная система организации движения тяжеловесных и длинносоставных поездов / ИЛ. Паристый // Железнодорожный транспорт. — 1979. — № 6. — С. 5 —15. 15. Паристый, ИЛ. Вождение поездов повышенной массы и длины / ИЛ. Паристый, Р.Г. Черепашенец. — М.: Транспорт, 1983. — 240 с. 16. Ge X, Ling L, Chen S et al (2021) Countermeasures for preventing coupler jack-knifing of slave control locomotives in 20,000-tonne heavy-haul trains during cycle braking. Veh Syst Dyn. 17. Ляушкин, А.А. Анализ обрывов и саморасцепов автосцепок / А.А. Ляушкин, В.А. Паршиков, И.А. Астафьев // Актуальные вопросы науки и техники: Материалы Международной студенческой научно-практической конференции, Воронеж, 16 июня 2015 года. Том 2. - Воронеж: Руна, 2015. — С. 97 — 103. 18. Козубенко, В.Г. Безопасное управление поездом: вопросы и ответы: Учебное пособие для образовательных учреждений железнодорожного транспорта / В.Г. Козубенко — М.: Маршрут, 2005. —320 с. 19. Васин, Н.К. Особенности эксплуатации в сложных условиях: почему обрываются автосцепки в грузовых поездах / Н.К. Васин // Локомотив. — 2006. — № 12. — С. 20 — 22. 20. Нормы для расчета и проектирования вагонов железных дорог МПС колеи 1520 мм (несамоходных). — М.: ГосНИИВ — ВНИИЖТ, 1996. 21. Расчеты и испытания тяжеловесных поездов / Е.П. Блохин, Л.А. Манашкин, ЕЛ. Стамблер и др.; Под ред. Е.П. Блохина. — М.: Транспорт, 1986. — 263 с. 22. Автоматизированные системы управления электроподвижным составом: учебник: в 3 ч. Ч. 1: Теория автоматического управления / Л.А. Баранов, А.Н. Савоськин, О.Е. Пудовиков и др.; под ред. Л.А. Баранова и А.Н. Савоськина. — М.: ФГБОУ «Учебно-методический центр по образованию на железнодорожном транспорте», 2013. — 400 с. 23. Дубровский, З.М. Грузовые электровозы переменного тока. Справочник / З.М. Дубровский, В.И. Попов, Б.А. Тушканов; Под ред. Б.А. Тушканова. — М.: Транспорт, 1991. — 471 с. 24. Тихменев, Б.Н. Подвижной состав электрифицированных железных дорог: Теория работы электрооборудования. Электрические схемы и аппараты / Б.Н. Тихменев, В.А. Кучумов. — М.: Транспорт, 1988. — 311 с. 25. Проектирование систем управления электроподвижным составом / Н.А. Ротанов, Д Л- Захарченко, А.В. Плакс, и др.; Под ред. Н.А. Ротанова. — М.: Транспорт, 1986. — 327 с. 26. Автоматизация электроподвижного состава: Учебник для вузов ж.-д. трансп./ А.Н. Савоськин, Л.А. Баранов, В.П. Феоктистов; под ред. А.Н. Савоськина. — М.: Транспорт, 1990. — 311 с. 27. Электровоз ВЛ85: Руководство по эксплуатации. — М.: Транспорт 1982, — 662 с. 28. Электровоз ВЛ65: Руководство по эксплуатации. Техническое описание, электрические аппараты. — Новочеркасск: ВЭлНИИ, 1992. 29. Электровоз 2ЭС5К. Руководство по эксплуатации. Книга 5. — Новочеркасск: ВЭлНИИ-НЭВЗ, 2005. — 164 с. 30. Система управления и диагностики электровоза ЭП10 / Под ред. С.В. Покровского. — М.: Интекст, 2009. — 356 с. 31. Электровоз грузовой постоянного тока 2ЭС6 с коллекторными тяговыми электродвигателями: Руководство по эксплуатации. —166 с. 32. Электровоз грузовой постоянного тока 2ЭС10 с асинхронными тяговыми электродвигателями: Руководство по эксплуатации. —101 с. 33. Микропроцессорные системы автоведения электроподвижного состава / Л .А. Баранов, Я.М. Головичер, Е.В. Ерофеев, В.М. Максимов; Под ред. Л.А. Баранова. — М.: Транспорт, 1990. — 272 с. 34. Интеллектуальная система автоматизированного вождения поездов повышенной массы и длины с распределенными по длине локомотивами ИСАВП-РТ: Руководство по эксплуатации АЮВП.468382.004РЭ. — 76 с. |
|
|
Цитировать 14 |
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| [03-2023] Проекты систем технического зрения для автоматического управления движением | Admin | xx3 | 0 | 14.12.2023 18:52 |
| [01-2016] Перспективы развития системы автоматического управления торможением | Admin | xx2 | 0 | 04.07.2020 12:04 |
| Инструкция по размещению, установке и эксплуатации средств автоматического контроля технического состояния подвижного состава на ходу поезда | Admin | Системы централизации и блокировки | 5 | 24.12.2014 19:21 |
| [Новости РЖД] На Южно-Уральской железной дороге прошли испытания новейшей системы автоматического управления тормозами | Admin | Новости на сети дорог | 0 | 05.05.2011 07:25 |
| =Курсовая работа= Проектирование системы автоматического регулирования | СЦБист | Дипломы, курсовые, лекции, рефераты по СЦБ | 0 | 14.08.2009 07:33 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , , , , , , , , , , , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|










