



|
|
|
|
#1 (ссылка) |
|
Crow indian







Регистрация: 21.02.2009
Возраст: 41
Сообщений: 30,426
Поблагодарил: 398 раз(а)
Поблагодарили 6046 раз(а)
Фотоальбомы:
2624 фото
Записей в дневнике: 904
Репутация: 126141
|
Тема: [05-2022] Микропроцессорная система управления и диагностики электровоза 2ЭС6 «СИНАРА»Микропроцессорная система управления и диагностики электровоза 2ЭС6 «СИНАРА» И.А. ОСИНЦЕВ, преподаватель Тайгинского подразделения Западно-Сибирского учебного центра профессиональных квалификаций Микропроцессорная система управления и диагностики (МПСУиД) электровоза 2ЭС6 «Синара» выполняет функции управления всеми основными системами и оборудованием локомотива по командам, получаемым с пульта управления, на основании сигналов, принимаемых от датчиков. Основой системы МПСУиД (рис. 1) является центральный процессор, к которому подключены устройства постоянной и оперативной памяти, порты ввода-вывода. В постоянной памяти записана программа работы процессора, в соответствии с которой он принимает данные с портов ввода. На основе этой информации в соответствии с заданной программой процессор производит логические действия. В результате выдаются управляющие сигналы и информация, которые выводятся на определенных индикаторах и мониторах, а также поступают в аппаратуру и оборудование. Процессор использует данные, хранящиеся в постоянной и оперативной памяти. С внешними объектами процессор обменивается информационными и управляющими сигналами через порты ввода и вывода по интерфейсным шинам, которые передают и принимают информацию по определенным протоколам. Микропроцессорная система МПСУиД выполняет следующие функции:
Система МСУЛ-А обеспечивает:
 Первый уровень МПСУиД включает в себя блоки противо-боксовочной защиты (БЗС-ПБС), связи с преобразователем (БС ПСН), связи с системой измерения (БС-СИ). Подсистема СИ предназначена для ввода в МСУЛ-А аналоговых сигналов (о токах и напряжениях в силовой цепи электровоза) от преобразователей напряжения в код (ПНКВ-1), мегаомметров МГМ-1 (о величине сопротивления изоляции ТЭД) и передачи получаемой информации через БС-СИ в каждый из двух каналов линии связи RS-485 МСУЛ-А. Подсистема СИ (рис. 3) включает в себя:
Блок ПНКВ-1 предназначен для измерительного преобразования входных напряжений в кодовый сигнал и передачи его по линии связи RS-485 через БС-СИ в МСУЛ-А. Блок МГМ-1 обеспечивает измерение сопротивления изоляции между обмотками и корпусом ТЭД при номинальном рабочем напряжении контактной сети и отображение на встроенном цифровом индикаторе полученных значений сопротивления изоляции, испытательного напряжения, тока утечки, а также для преобразования измеренных величин в кодовый сигнал и передачи его по линии связи RS-485 через БС-СИ в МСУЛ-А. Датчик напряжения ДН-4 проводит преобразование высоковольтного входного напряжения до 4 кВ в напряжение до 75 мВ для дальнейшего его использования в системе измерения. Датчики ДД предназначены для преобразования давления сжатого воздуха в электрический сигнал. Используются взаимозаменяемые датчики двух типов — измерительный преобразователь давления ДД-И-1,00-01 и датчик избыточного давления ДДИ-1. Блок связи БС-ДД осуществляет прием аналоговых сигналов от датчиков ДД и преобразование их в последовательный код, измерение сопротивления изоляции цепей управления, не соединенных с корпусом электровоза, передачу преобразованных данных по двум линиям связи RS-485 в МСУЛ-А. Второй уровень включает в себя основную часть МПСУиД — микропроцессорную систему МСУЛ-А, которая обобщает поступающую информацию и вырабатывает управляющие сигналы. В состав системы МСУЛ-А (рис. 4) входят:
Блок БВС предназначен для приема сигналов, поступающих от цепей управления, и передачи обработанных сигналов в линии связи МСУЛ-А. Блок состоит из двух идентичных каналов, что позволяет обеспечить его работоспособность в случае отказа любого из них. Он способен обрабатывать 16 сигналов (работает с двумя каналами связи RS-485). Блок БУК-3 предназначен для управления электромагнитными и электропневматическими контакторами электровоза в соответствии с управляющими сигналами, поступающими через линии связи МСУЛ-А. Он состоит из двух идентичных каналов. На третьем у ровне находятся подсистемы автоведения (АВ), диагностирования (Д), система взаимодействия с локомотивом (СВЛ). Сюда же могут быть подключены и другие системы (по требованию заказчика). Для информационной связи подсистем 2-го и 3-го уровней применен интерфейс CAN 2.0. В обмене используются макрокоманды доступа к управлению отдельными элементами. Связи в системе 2-го уровня и ее связи с подсистемами 1-го уровня обеспечивает сдвоенный (с резервированием) интерфейс RS-485. В каждой линии связи присутствует информация от трех каналов МСУЛ-А. Каждая подсистема подключается к интерфейсу не более чем одним приемопередатчиком для каждой линии. Для связи между элементами в подсистемах СИ, ПСН и ПБЗ используется интерфейс RS-485, в системе СВЛ — CAN 2.0. С целью обеспечения надежности главные узлы МСУЛ-А выполнены трехканальными. Система МСУЛ-А принимает информацию от подсистем 3-го уровня, органов управления, подсистем СИ и ПБЗ, цепей управления электровоза и выбирает управляющее воздействие на аппараты электровоза и подсистему авторегулирования. В процессе работы МСУЛ-А производит диагностику устройств своего уровня и непосредственно связанных с ними цепей электровоза, а также заносит в энергонезависимую память данные о функционировании устройств 2-го уровня. В системе МСУЛ-А используется оперативная информация, связанная непосредственно с управлением электровозом (цикл обмена 50 — 100 мс), и сервисная информация (связанная, например, с измерением сопротивления изоляции в высоковольтных и низковольтных цепях, расходом электроэнергии и т.д.). Цикл обмена составляет 1 с и более. От цепей управления электровоза в МСУЛ-А поступает информация в виде входных дискретных и аналоговых сигналов: дискретные сигналы — с пульта управления и аппаратов электровоза, аналоговые — от подсистемы СИ. Пороговое значение напряжения входных дискретных сигналов составляет (25 ± 10) В. Система МСУЛ-А осуществляет:
После включения питания возможна самодиагностика МСУЛ-А. Система МСУЛ-А организует запуск вспомогательного оборудования электровоза, поддерживает требуемые параметры функционирования, обеспечивает реализацию тяговых и тормозных сил. Система МСУЛ-А производит:
лов линии связи время задержки увеличивается, но не превышает 100 мс. Для связи отдельных секций электровоза используется двухканальная линия связи, аналогичная интерфейсу RS-485, но с напряжением, увеличенным до 12 В. Максимальное возможное число секций электровоза, управляемых МСУЛ-А, равно восьми. Время задержки информации управления составляет около 40 мс, а информации сигнализации — около 120 мс. В случае отказа одного из каналов линии связи время задержки распространения информации увеличивается в 2 раза. На мониторы выводится полная информация, полученная по обеим линиям связи RS-485, о состоянии цепей управления, силовой схемы электровоза, о готовности к работе МСУЛ-А и диагностируемых параметрах. К левому монитору подключены система автоведения и система информирования машиниста. На пульте управления установлены две клавиатуры, каждая из которых соответствует определенному монитору.  На электровозах с традиционным аналоговым (релейным) управлением последовательность включения аппаратов определялась механическими блокировочными контактами. Блокировочные контакты одного аппарата, как правило, устанавливались в цепь питания катушки другого. Таким образом осуществлялась зависимость функционирования одного аппарата от действий другого. При этом основную роль играла электрическая схема цепей управления. Электровоз 2ЭС6 «Синара», относящийся к электровозам переходного периода, оснащен многочисленными высоковольтными коммутационными аппаратами. Их функционирование в зависимости друг от друга, как, собственно, и управление ими, реализованы с помощью выходных транзисторных ключей микропроцессорной системы управления. В цепь катушки каждого аппарата со стороны «минуса» введен выходной транзисторный ключ, который обеспечивает подключение катушки к питанию только по заданному программой алгоритму. На таких электровозах основную роль играет уже не электрическая схема цепей управления, а алгоритм, в соответствии с которым управляющая катушка того или иного аппарата получает питание. Для того чтобы понять последовательность работы оборудования электровоза, определить характеристики электровоза, необходимо рассмотреть алгоритмы, задаваемые для системы МПСУиД. Возможно выделить несколько этапов работы электровоза: приведение в рабочее состояние, эксплуатация, перевод в «холодное» состояние. При приведении электровоза в рабочее состояние необходимо включить систему МПСУиД, которая затем задает команды на запуск остальных систем и оборудования электровоза. Прежде всего для этого следует подключить аккумуляторную батарею, автоматические защитные выключатели, выключатели систем МПСУиД и БЛОК (в шкафу МПСУиД — справа в машинном отделении) и затем исполнительные цепи управления МПСУиД. Алгоритм включения цепей управления МПСУиД. Команда подается выключателем S1 «Выключатель управления». Условие выполнения команды: не находятся во включенном положении кнопки «Токоприемник», «Быстродействующий выключатель», «Мотор-вентиляторы», «Мотор-компрессор», «Мотор-компрессор принудительно», «Продувка резервуаров», «Отпуск тормоза», «Песок». Если хотя бы одна из них включена, необходимо ее выключить и повторить команду выключателем S1. Действия осуществляются по следующему алгоритму:
Затем система МПСУиД запускает алгоритмы изменения положения разъединителя, заземлителя и включения токоприемника. Алгоритм подъема токоприемника, включения разъединителя и заземлителя. Команда подается установкой в положение «Вкл.» одного или нескольких переключателей «Токоприемники»: SB15 «Секция 1», SB16 «Секция 2», SB17 «Секция 3», SB18 «Секция 4». Условия выполнения команды по изменению положения разъединителей и заземлителя для всех секций:
Условия выполнения команды на подъем соответствующего токоприемника: БВ выключены или имеется UKC на секциях 1 и 2 (при двух секциях) или на секциях 1 — 3 (при трех секциях); ножи переключателя Q1 установлены в положение нормальной эксплуатации (отменено переключение силовой цепи на розетки ввода в депо Х21 и Х22); отсутствует сигнал системы пожаротушения (контакт KL21 замкнут); уже поднято не более двух токоприемников; ’Ъ достаточно давление в питательной магистрали. Подается питание на электропневматический клапан КР1 выбранной секции и осуществляется подъем токоприемника. После подъема токоприемника производится включение БВ и затем сразу включение преобразователя собственных нужд (ПСН). Алгоритм включения БВ и ПСН. Команда на включение БВ подается тумблером SB30 «Быстродействующий выключатель». Далее производятся действия по следующему алгоритму: срабатывает промежуточное реле KL9, включается на 2 с контактор КМ17 (возврат защиты), если выключены тяговый и тормозной режимы ТЭД; Ф* по цепи, в которой замкнуты блокировочные контакты дифференциальных реле KAI, КА2 и быстродействующих контакторов К41 и К42, блокировочный контакт блока защиты А1 преобразователя ПСН, подается напряжение 110 В на катушки БВ, электромагнитной защелки QF1-2 (354) и электромагнитного вентиля QF1-1 (335); Ф* БВ включается и становится на самоподпитку после замыкания блокировочного контакта QF1; другой блокировочный контакт QF1 выводит из цепи катушки электромагнитной защелки дополнительный резистор R133, что обеспечивает ток, достаточный для ее удержания; еще один блокировочный контакт QF1 подает напряжение 110 В в цепь провода 400; включается промежуточное реле KL2, которое вводит в цепь катушки КА1 добавочный резистор R103. Включение на 2 с контактора КМ17 обеспечивает включение БВ и подачу напряжения на катушки подпитки дифференциального реле токовой защиты от коротких замыканий на землю: КА1 — реле защиты тяговых двигателей, КА2 — реле защиты ПСН. Реле КА2 включается и готово к работе, если разность тока в его силовых катушках не превышает 8,5 А (при большей разности токов срабатывает защита и выключается БВ).  Подача высокого напряжения на вход ПСН осуществляется двумя ступенями, что обеспечивается последовательным включением контакторов КМ1 и КМ2. Контактор КМ1 (1-я ступень запуска ПСН) включается через 3 с после выключения контактора КМ17, еще через 2 с включается контактор КМ2 (2-я ступень запуска ПСН). Система МПСУиД осуществляет контроль за включением ПСН по сигналам, поступающим на ее вход через блокировочные контакты КМ1 и КМ2. Если через 1 с после включения контактора КМ2 не появился сигнал «Контроль ПСН», контакторы КМ1 и КМ2 выключаются. Повторное включение ПСН производится только после выключения БВ. Алгоритм включения главного компрессора. На главный компрессор от преобразователя ПСН подается напряжение:
О тумблером «Компрессор» при давлении в напорной магистрали любой секции менее 7,5 кгс/см2; О кратковременным нажатием кнопки SB11 «Принудительное включение компрессора». Условия выполнения команды сводятся к следующему:
Продувка главных резервуаров продолжительностью 1 — 2 с выполняется каждый раз через 5 с после команды «Включение МК» или «Включение МК принудительно». Алгоритм управления вентиляторами охлаждения тяговых двигателей. Команда подается включением кнопки SB28 «Вентиляторы». Условия выполнения команды:
(Окончание следует) |
|
|
Цитировать 14 |
| Поблагодарили: |
Данный пост получил благодарности от пользователей
|
|
|
#2 (ссылка) |
|
Crow indian
Автор темы
Регистрация: 21.02.2009
Возраст: 41
Сообщений: 30,426
Поблагодарил: 398 раз(а)
Поблагодарили 6046 раз(а)
Фотоальбомы:
2624 фото
Записей в дневнике: 904
Репутация: 126141
|
Алгоритм управления тяговыми электродвигателями. Действия машиниста по выбору режима работы (включения) ТЭД:
Команда на отключение ТЭД подается переключателями SA28 — SA31, команда на выбор направления движения (реверсирование) электровоза — переключателем SA41 «Реверсор». Действия осуществляются по алгоритму:
При независимом возбуждении ТЭД действия осуществляются по следующему алгоритму:
□ питание подается на вентили QP3-2 и QP4-2 электропневматических переключателей; L) обмотки возбуждения включаются в цепь якорей ТЭД последовательно; □ контакторы К31 и К32 не включаются; □ статические преобразователи возбуждения выключены. Алгоритмы для режима «Тяга». Условия выполнения: Ъ включен выключатель управления; Ъ включен БВ; < отсутствует команда «Возврат защиты»; реверсор установлен в положение «Вперед» или «Назад», имеется сигнал, подтверждающий установку реверсоров всех секций в положение, соответствующее ориентации секции; имеется сигнал, подтверждающий установку переключателей возбуждения в заданное положение; Ъ собрана цепь контроля команды «Выбег» (реле KL10 не получает питания, электропневматический клапан автостопа включен, выключатель цепей управления установлен в положение «3»), В случае невыполнения хотя бы одного из этих условий производится установка нулевой позиции и уставки тока возбуждения, равной нулю. Команды управления в режиме «Тяга» подаются: < 2 джойстиком SA45 «Тяга» — выбор позиций управления командами «+1», «-1», «+А», «-А»; < 2 джойстиком SA46 «Ток возбуждения» — задание команд «+ОВ», «-ОВ», изменяющих интенсивность силы тяги; < 2 включением кнопки SB31 «Выбег» — создается возможность для перевода ТЭД в режим выбега; тумблером SA43 «Фиксированная скорость» — для обеспечения установившейся скорости движения. Действия в соответствии с алгоритмом различаются в зависимости от состояния ТЭД (включены или выключены) на разных секциях (ведущая/ведомая). При всех включенных ТЭД на ведущей секции осуществляются: переключение реостатных контакторов с нулевой позиции по 65-ю; переключение линейных контакторов при изменениях соединений ТЭД (С — сериесное, СП — сериесно-параллельное, П — параллельное); кратковременное включение промежуточного реле KL2, т.е. управление подпиткой дифференциального реле КА1 защиты силовой цепи ТЭД при переходе с С- на СП-соединение. При всех включенных ТЭД на ведомой секции производятся: переключение реостатных контакторов с 24-й позиции по 65-ю; переключение линейных контакторов при изменении соединений ТЭД; включение реле KL2 при переходе с С- на СП-соединение ТЭД. При отключении тяговых двигателей 1 и 2 или 3 и 4 на ведущей секции обеспечиваются: переключение реостатных контакторов с нулевой по 23-ю позиции; выключенное состояние реостатных контакторов с 24-й по 44-ю позиции; переключение реостатных контакторов с 45-й по 65-ю позиции в последовательности, соответствующей позициям 24 — 44 нормального (без выведенных ТЭД) режима; переключение линейных контакторов при изменении соединения ТЭД (С, СП, П), исключающее протекание тока по обмоткам отключенных ТЭД; выключенное состояние реостатных контакторов с нулевой по 23-ю позиции; включение реле KL2 при переходе С-СП. При отключении тяговых двигателей 1 и 2 или 3 и 4 на ведомой секции обеспечивается: выключенное состояние реостатных контакторов с нулевой по 44-ю позиции; переключение реостатных контакторов с 45-й по 65-ю позицию в последовательности, соответствующей позициям 24 — 44 нормального (без выведенных ТЭД) режима; •+ переключение линейных контакторов при изменении соединений ТЭД, не допускающее протекания тока по обмоткам отключенных ТЭД; 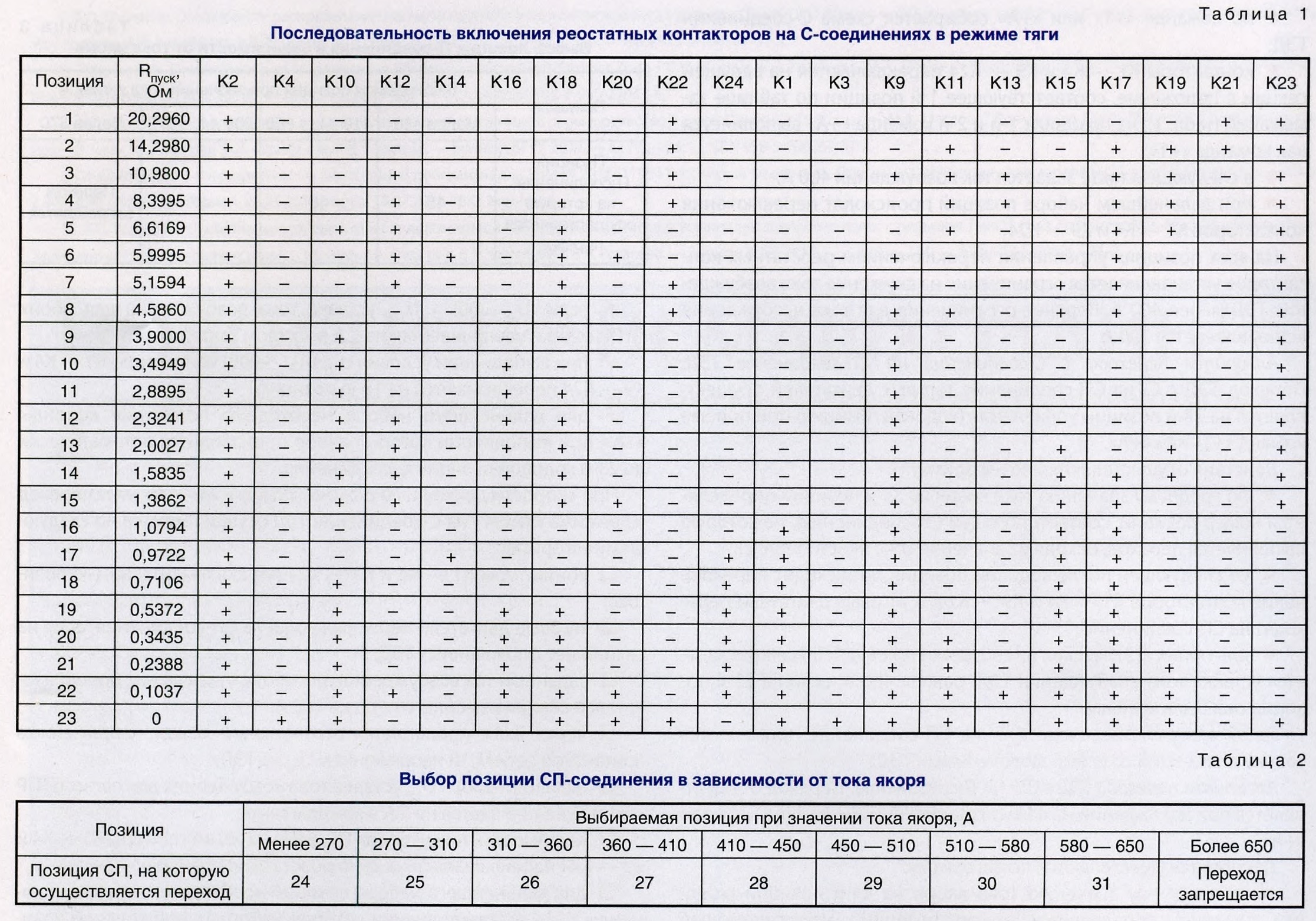
Условия для набора позиций по команде «+А»:
Алгоритм набора позиций из режима «Выбег». Условие выполнения: скорость движения менее 12 км/ч (нулевая позиция, уставка тока возбуждения равна нулю). Действия осуществляются по алгоритму:
Алгоритм перехода с С-соединения на СП-соединение ТЭД. Переход ТЭД с С- на СП-соединение тяговых двигателей осуществляется на 23-й позиции управления (ходовая позиция) при приеме команд «+1» или «+А». Действия осуществляются по алгоритму:
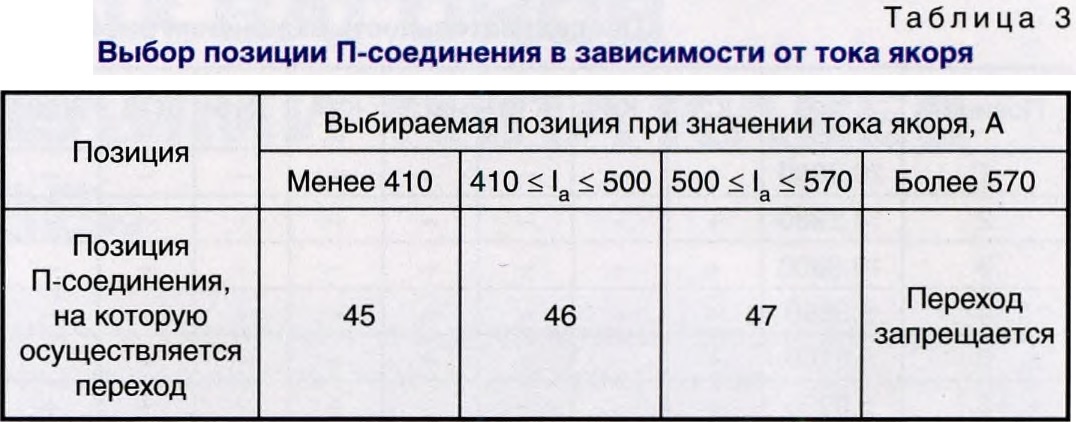
Алгоритм перехода ТЭД с СП- на П-соединение. Переход осуществляется при нахождении на 44-й позиции и приеме команд «+1» или «+А». Действия осуществляются по алгоритму:
При скорости движения в режиме «Выбег» 12 — 24 км/ч переход из режима «Выбег» на С-соединение ТЭД осуществляется по следующему алгоритму:
 Если на данной секции имеется одна отключенная группа ТЭД, то контакторы К1 — К4 и К9 — К24 переключаются в соответствии с таблицей замыкания для соединения СП. Алгоритм установки режима «Выбег». Команда подается нажатием кнопки SB31 «Выбег». Условия для выполнения данного алгоритма:
по команде «Выбег» разбирается схема тягового режима или электрического торможения; при сигнале об обрыве тормозной магистрали (ТМ) и замедлении движения поезда машинист должен произвести торможение, отключив микровыключатель ДТЦ камеры тормозных цилиндров; при этом разрывается цепь питания катушки реле KL10, контакт которого замыкает цепь, соответствующую режиму «Выбег», светодиод VD59 гаснет. В случае обрыва ТМ в хвосте поезда воздухораспределитель на торможение не срабатывает. Если при разрядке ТМ давление снижается на 20 кПа (0,2 кгс/см2), замыкается контакт микровыключателя камеры дополнительной разрядки ДДР. Катушка реле KL10 не связана с МПСУиД и получает питание от провода 600. Одним контактом реле KL10 разрывает цепь, соответствующую режиму «Выбег», а другим шунтирует ДДР. При этом происходит «запоминание» полученного сигнала обрыва даже в случае кратковременного замыкания контактов ДДР. Светодиод VD59 сигнализирует о нарушении целостности ТМ. Алгоритм ограничений перехода из режима «Тяга» в режим «Выбег». Команда «Выбег» (перевод из режима «Тяга» в режим «Выбег») выполняется за два такта: в первом выключается часть реостатных контакторов и в цепь ТЭД вводятся пусковые резисторы, а во втором — выключаются все остальные контакторы. Действия осуществляются по алгоритму: S3 в режиме «Тяга» при токе якоря любого ТЭД более 800 А блокируется выполнение команд «+1» и «+А», выводится сообщение «Перезагрузка ТЭД на секции №...» и выполняется команда «Увеличение уставки силы тяги» (+ОВ); если перегрузка ТЭД не ликвидирована за 10 с, то выполняется команда «-1»; S3 по сигналу «Сильное скольжение», поступающему от подсистемы ПСЗ любой из секций, выполняется команда «-1»; если через б с поступление команды «Сильное скольжение» не прекратилось, команда «-А» выполняется повторно. На каждой реостатной позиции С-, СП- и П-соединений тяговых двигателей предельное время работы при токах якоря более 500 А составляет 20 На позициях 62, 63 и 64 параллельного соединения при токах якоря более 500 А предельное время работы равно 12 с. В случае более длительного нахождения на какой-либо позиции осуществляется принудительный переход на следующую позицию (если до этого выполнялся набор позиций) или принудительный переход на предыдущую позицию (при сбросе позиций). Алгоритм управления возбуждением ТЭД при регулировании силы тяги. Ток возбуждения регулируется раздельно для групп тяговых двигателей отдельных тележек. Для отключенных групп ТЭД ток возбуждения устанавливается равным нулю, соответствующий контактор в цепи обмоток возбуждения остается разомкнутым. На реостатных позициях во время пуска (RnycK т- 0) при выполнении условия 0,6UKC > 11тд уставка тока возбуждения передается на все секции. Когда напряжение на ТЭД в процессе пуска станет больше 60 % напряжения в контактной сети, управление ТЭД переводится в режим, предусматривающий регулирование силы тяги на отдельных тележках. Действия осуществляются по алгоритму: на секции, с которой ведется управление, при вводе команды «+ОВ» или «-ОВ» и в течение 0,6 с после его прекращения вычисляется заданное значение силы тяги для одной тележки; по среднему току возбуждения или по току возбуждения включенной ветви ТЭД определяется магнитный поток Ф; рассчитывается сила тяги для тележки (сила тяги больше нуля, сила торможения меньше нуля) — FK = 2Ф1Я, кН; полученное значение силы тяги передается в качестве задания на все секции и не изменяется до ввода команды «+ОВ» или «—ОВ»; на соединениях С и СП при необходимости снижения силы тяги или торможения на определенной тележке уменьшается уставка тока возбуждения соответствующей группы ТЭД, а для увеличения силы тяги или силы торможения уставка тока возбуждения увеличивается; на параллельном соединении ТЭД увеличение силы тяги какой-либо тележки производится путем уменьшения уставки тока возбуждения ее двигателей, а снижение силы торможения — снижением уставки тока возбуждения. При регулировании силы тяги должны выполняться следующие условия:
Алгоритм управления в режиме «Электрическое торможение». Команда «-ОВ» или «-А» подается, пока не будут достигнуты отрицательные значения силы. При достижении силой тяги или торможения отрицательных значений в режиме «Выбег» (сила равна нулю, нулевая позиция) по скорости движения определяется соединение ТЭД, на котором должен работать привод. По истечении 5 — 10с устанавливается значение силы торможения, заданное машинистом с учетом условий и ограничений. При достижении силой тяги или торможения отрицательных значений в процессе работы на каком-либо соединении ТЭД путем регулирования тока возбуждения на этом соединении устанавливается режим «Электрическое торможение — рекуперация» с предварительным торможением при тормозной силе на уровне 30 кН, действующим в течение 15 — 20 с. По истечении 15 — 20 с устанавливается значение силы торможения, заданное машинистом с учетом условий и ограничений. Данный алгоритм применяется при выполнении следующих условий:
Действия осуществляются по алгоритму:
вариант 1 —включены контакторы К7 и К8 (на двигатели подается часть напряжения на резисторах); вариант 2 — включены контакторы К5 и Кб (на двигатели подается полное напряжение на резисторах). Действия осуществляются по алгоритму:
Действия осуществляются по алгоритму: электропневматический вентиль КРЮ «Жалюзи» получает питание в режиме «Тяга» на реостатных позициях или в режиме «Электрическое торможение»; жалюзи не открываются на прицепных секциях при С-соединении в тяговом режиме, так как задействованы только ПТР на секции, с которой ведется управление; конечные выключатели SQ4 — SQ7 предназначены для контроля, осуществляемого системой МПСУиД. Алгоритм управления тормозным оборудованием. Алгоритмы, используемые для управления тормозным оборудованием, в разных режимах работы различны. Отпуск тормозов. Условиями выполнения алгоритма являются: приведены в действие тормоза состава; используется переключатель «Отпуск тормоза» SA47, имеющий три положения: «0», «1» (фиксированные), «2» (импульсное). Действия осуществляются по алгоритму: х для отпуска тормозов локомотива необходимо включить переключатель SA47 «Отпуск тормоза»; после переключения SA47 из положения «1» в положение «2» получает питание электромагнитный вентиль клапана КР22; х атмосферный клапан открывается, и через него сжатый воздух из полости реле давления (РД) выходит в атмосферу; перекрывает ся подача воздуха от блока воздухораспределителя БВР к реле РД, и тормозные цилиндры (ТЦ) сообщаются с атмосферой; происходит отпуск тормозов; х после установки переключателя SA47 в положение «2» команда «Отпуск тормоза» может быть отменена только в случае перевода его в положение «0» либо при давлении в тормозной магистрали выше 0,48 МПа (5 кгс/см2). Блокировка тормозов.Действия осуществляются по алгоритму: • при включении режима электрического торможения получает питание клапан КР23; • блокируется импульсный трубопровод; БВР и реле давления РД сообщаются с атмосферой. Команда «Блокировка тормоза» отменяется при переходе в режим «Выбег». Срыв рекуперации. При срыве электрического торможения подается команда «Срыв». В режиме электрического торможения в момент смены соединений ТЭД обеспечивается подтормаживание пневматическими тормозами. При этом теряет питание клапан КР23 и получает питание электропневматический вентиль КР24, который обеспечивает наполнение тормозных цилиндров до давления 0,25 МПа (2,5 кгс/см2). После завершения перехода на другое соединение ТЭД вентиль ЭПВ теряет питание, а клапан КР23 получает питание и обеспечивает блокирование пневматических тормозов. Совместная работа электрического и вспомогательного пневматического (при помощи крана КВТ) тормозов возможна до установления в ТЦ давления сжатого воздуха, равного 0,13 ... 0,15 МПа (1,3 ... 1,5 кгс/см2). Дальнейшее повышение давления в ТЦ приводит к отключению электрического торможения. Экстренное торможение. Командой является установка поездного крана машиниста в положение экстренного торможения. Условием выполнения является разрядка тормозной магистрали до давления, равного 0,35 МПа (3,5 кгс/см2). При этом выдается команда на разбор схемы режима тяги. Алгоритм выключения цепей управления МПСУиД. Командой является выключение выключателя управления. Действия осуществляются по алгоритму: ❖ выключение (тягового или тормозного режима) тяговых двигателей, работающих в тяговом или тормозном режиме; ❖ выключение мотор-вентиляторов охлаждения тяговых двигателей, мотор-компрессора, преобразователя собственных нужд; ❖ выключение быстродействующего выключателя; ❖ опускание токоприемников; ❖ выключение контакторов КМ10, КМ11. Алгоритм опускания токоприемника. Командой служит опускание токоприемника. На соответствующей секции электровоза теряет питание электропневматический вентиль КР1, и токоприемник этой секции опускается. Алгоритм выключения разъединителей. Условиями выполнения алгоритма на выключение разъединителей являются отключение БВ на соответствующей секции, опускание остальных токоприемников. Действия осуществляются по алгоритму: ■ получают питание выключающие катушки разъединителей QS1-2; ■ выключаются разъединители всех секций; ■ включаются заземлители QS2-1. Условиями включения заземлителей являются: □ отсутствие команд на подъем токоприемников всех секций; □ отсутствие напряжения U№ на всех секциях сцепа; □ выключение БВ. Алгоритм отключения БВ. Командой служит отключение тумблера SB30 «Быстродействующий выключатель». Действия осуществляются по алгоритму:
|
|
|
Цитировать 14 |
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| [11-2014] Микропроцессорная система управления, регулирования и диагностики тепловоза ТЭМ7А | poster333 | xx2 | 2 | 26.11.2019 11:07 |
| [07-2019] Пневматическое оборудование цепей управления электровоза 2ЭС6 «СИНАРА» | бабулер27 | xx2 | 0 | 31.08.2019 10:01 |
| [03-2017] Схема пневматического тормозного оборудования электровоза 2ЭС6 «СИНАРА» | Admin | xx2 | 1 | 07.01.2019 18:36 |
| Фото оборудования электровоза 2ЭС6 "Синара" | Admin | Тяговый подвижной состав | 1 | 30.03.2013 14:26 |
| Микропроцессорная система управления и диагностики оборудования электровозов МСУД-Н | Admin | Тяговый подвижной состав | 0 | 21.06.2011 19:11 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , , , , , , , , , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|










