Как строить системы телемеханики электроснабжения
Группа специалистов Санкт-Петербургского государственного университета путей сообщения длительное время занималась совершенствованием систем телеуправления и телемеханики устройств электроснабжения. В данной статье они предлагают принципы построения систем телемеханики электроснабжения дорог, которые, с одной стороны, могут сравнительно легко быть вписаны в современный уровень разработки таких систем, с другой — смогут существенно повысить достоверность как телеуправления, так и телесигнализации систем.
Авторы считают, что с учетом коммутирования высоковольтной аппаратуры и наблюдения за ее состоянием, ни в коем случае не должен пройти ни один ложный сигнал телеуправления. Во внимание надо принимать как возможные сбои аппаратуры, так и возможные ошибки оператора-диспетчера. Также не должно быть ложной индикации фактического состояния высоковольтного аппарата на щите сигнализации диспетчерского пункта.
В 1946 г. по настоящее время в нашей стране был создан ряд систем телемеханики электроснабжения. Элементной базой аппаратуры телемеханики, разработанной и применявшейся в 1946 — 1960 гг., являлись релейно-контактные элементы — телефонные реле и шаговые искатели. Бесконтактные элементы были впервые использованы при разработке электронных систем телеуправления БНТУ-58, БСТ-59 и БТР-60.
Массовое внедрение систем телемеханики электроснабжения началось при поставке на дороги электронной системы телемеханики ЭСТ-62, построенной на типовых элементах, выполненных с применением печатного монтажа. На следующем этапе появилась система телемеханики «Лисна».
Основой ее типовых элементов — модулей «Сейма» — стали кремниевые транзисторы.
В типовых элементах микроэлектронной системы телемеханики МСТ-95 использованы микросхемы малой степени интеграции.
Передатчики и приемники сигналов этой системы построены с применением микропроцессоров. Диспетчер может пользоваться не только специальным пультом управления и стационарным щитом сигнализации, как это предусмотрено, в частности, в системах ЭСТ-62 и «Лисна», но и автоматизированным рабочим местом — АРМ. АРМ представляет собой компьютер, связанный с системой адаптером и снабженный набором программ (в том числе программ для визуализации энергодиспетчерских кругов), позволяющих реализовать телеуправление и телесигнализацию.
В значительной мере системы ЭСТ-62, «Лисна» и МСТ-95 по принципам построения, включая передачу сигналов телеуправления с диспетчерского пункта на контролируемые пункты и прием сигнализации от контролируемых пунктов, сходны друг с другом. Отличаются они друг от друга элементными базами. Сказанное позволяет нам условно называть эти системы как «системы типа ЭСТ-62».
Внедряемая сейчас модификация автоматизированных систем телемеханического управления (АСТМУ) — это система АСТМУ-А, разработанная с применением компьютеров и микропроцессоров, имеющая так же, как и системы типа ЭСТ-62 сосредоточенную структуру на уровне контролируемых пунктов. Она отличается от систем типа ЭСТ-62, в частности, принципом передачи и приема информации. Не останавливаясь на других отличиях, заметим, что принцип темнового щита сигнализации и квитирования в этой системе тот же, что и в системах типа ЭСТ-62. В настоящее время на дорогах одновременно используются системы ЭСТ-62, «Лисна», МСТ-95 и АСТМУ-А.
Рассматривая путь внедрения различных систем телемеханики, можно заметить, что вначале разработчики, естественно, старались реализовать структуру, выполняющую
запланированные алгоритмы минимальными средствами. При этом они шли на усложнения лишь в безвыходных случаях, например, для устранения влияния помех на наиболее ненадежном участке — воздушной линии связи диспетчерского пункта с контролируемыми пунктами.
По мнению авторов, дублирование аппаратуры для повышения безошибочности могло стать реальным лишь при построении систем на модулях, обладающих более высокой функциональной плотностью, нежели модули с навесным монтажом отдельных электронных элементов, на которых построены системы ЭСТ-62 и «Лисна».
Применение для них принципа дублирования аппаратуры препятствовало бы быстрому внедрению систем, так как резко увеличивались как объемы самой аппаратуры, так и объемы ее обслуживания, не говоря о капитальных затратах.
С учетом пониженных требований к быстродействию самих систем телемеханики и сравнительно высокой функциональной плотности релейно-контактных элементов, особенно современных, системы телемеханики с применением электромеханических реле позволяют применять как дублирование аппаратуры, так и другие схемотехнические приемы, чтобы создавать «надежные схемы из ненадежных элементов».
Использование в системах микросхем и тем более микропроцессорной техники, обладающей на сегодняшний день очень высокой функциональной плотностью, открывает дорогу для применения аппаратного дублирования.
Упомянув о возможном применении дублирования, вернемся к рассмотрению применяемых в используемых системах принципов телесигнализации и телеуправления, покажем возможность и желательность, по нашему мнению, их некоторого изменения. Прежде всего рассмотрим принципы сигнализации. В каждой из четырех используемых систем телемеханики применен принцип темнового щита сигнализации с возможностью квитирования сигнализации объектов.
Темновой щит использован разработчиками систем для удобства диспетчера. До тех пор пока высоковольтные коммутирующие аппараты находятся в предусмотренном нормальном состоянии (включенном или отключенном), соответствующие индикаторы на щите сигнализации не высвечены. Высвечивание происходит при переходе аппарата в противоположное, не соответствующее нормальному, состояние. Диспетчеру на фоне темнового щита легко обнаружить такой объект.
Индикация несоответствия может происходить как в аварийных ситуациях, так и при плановых переключениях объектов диспетчером. Он может применять квитирование, т.е. устанавливая новое положение объекта в качестве нормального, гасить сигнализацию объекта. Если все объекты телесигнализации находятся в предусмотренном состоянии, то диспетчер оценивает картину темнового щита как нормальную. Следствие применения такого щита — упрощение схемы за счет применения для создания тока лишь замкнутого состояния контакта датчика (обратной связи), непосредственно связанного с положением аппарата.
Недостаток применяемого темнового щита в том, что диспетчеру представляется нормальным положение объекта сигнализации и в тех случаях, когда оно является результатом ряда возможных неисправностей. Ими могут быть выход из строя индикатора, обрыв цепи питания индикатора, неисправности блоков питания щита, отсутствие этих блоков, обрыв цепи датчика обратной связи и, наконец, исчезновение самого высоковольтного аппарата!
(При проведении лабораторных работ на системах АСТМУ-А и МСТ-95 преподаватель имитировал перечисленные неисправности вплоть до изъятия высоковольтного коммутирующего аппарата. Студенты, исполняя роль энергодиспетчеров, естественно, не видели на щитах сигнализации диспетчерских пунктов никаких отклонений от нормальных (темновых) режимов. Это происходит потому, что заложенная в названных системах телесигнализация объекта при разомкнутом состоянии датчика обратной связи фактически с объектом не связана.)
Авторы считают, что степень достоверности применяемой сигнализации, удовлетворявшая требованиям времени создания систем, вряд ли сегодня может быть признана удовлетворительной.
Еще до разработок упомянутых систем телемеханики был известен принцип активного использования трех состояний контактного датчика обратной связи: замкнутого, разомкнутого и поврежденного. Авторы предлагают вернуться к хорошо забытому старому и использовать каждое из трех состояний датчика для получения токов (желательно различных) в первичных цепях сигнализации с преобразованием их в три различные светимости индикаторов. Кроме того, следует применять различный цвет подсвечивания в зависимости от включенного или отключенного состояния аппарата.
Нормально выключенные коммутационные аппараты, шины и фидеры могут быть слабо подсвечены, например, зеленым цветом. Нормально включенные — слабо подсвечены красным цветом. Для несоответствия нормальному состоянию можно применять те же цвета, но большей яркости. Квитирование, естественно, следует сохранить. Оно должно уменьшать яркость свечения. Поврежденные датчики обратной связи можно выделять особым режимом свечения. При таком построении сигнализации любая из приведенных выше неисправностей будет замечена диспетчером.
Нам могут возразить, что и сейчас в системе АСТМУ-А объекты в нормальном состоянии так же слабо подсвечиваются. Однако лишь одна степень свечения может быть реально связанной с объектом сигнализации, другая индикация — без связи.
ерейдем теперь к предложениям по телеуправлению
с одновременным уточнением построения щита сигнализации. Безошибочность посылки и приема сигналов телеуправления еще более важна, нежели достоверность телесигналов. Дело в том, что неправильная коммутация высоковольтных аппаратов может быть напрямую связана с опасностью для жизни обслуживающего персонала, а искажение телесигнализации — лишь косвенно.
Авторы не используют термин «наработка на отказ», хотя данный интегральный показатель, естественно, характеризует надежность, в частности, каналов передачи телесигналов. Они стараются, учитывая этот показатель, вы-
полнять оценку систем, различая возможные сбои по тем последствиям, которые те способны вызвать.
Ошибки сигналов телеуправления могут складываться из ошибочных наборов команд диспетчером и аппаратных ошибок. Рассмотрим сначала возможный прием снижения ошибок диспетчера-оператора.
Как бы мы ни спроектировали пульт телеуправления, будь он кнопочный, как в системах типа ЭСТ-62, компьютерный, как в АРМ МСТ-95 и в АСТМУ-А, или созданный в виде щита сигнализации, представляющего собой совмещение ключей управления и символов объектов в общих ключах-символах, как в системе телемеханики УТБ-3 — в любом случае возможны ошибки диспетчера-оператора при задании команд телеуправления.
Трудно утверждать, при каких пультах из названных ошибок будет больше. Авторы считают, что предельное упрощение операций при задании телесигнала от компьютера в сочетании с возможной быстротой набора команды может увеличивать число ошибок. С другой стороны, наглядность лучше всего реализована в пультах в виде не виртуального, а реального щита сигнализации, со встроенными ключами управления по типу пульта системы УТБ-3.
В современных системах телемеханики с использованием компьютеров применено архивирование действий оператора. Такая мера, заставляя диспетчера быть более внимательным, не делает его работу безошибочной. Она оказывает как положительное, так и отрицательное психологическое воздействие на специалиста.
Существует обоснованное, на наш взгляд, мнение, что зачастую диспетчер ошибается из-за дефицита времени при оперативных переключениях в ситуациях, близких к аварийным. Естественно, конструктивным изменением пультов такие ошибки полностью не устранить. Однако диспетчеру может быть предоставлен специальный режим переключений. В обычном режиме у него достаточно времени для переключений.
Для снижения возможных ошибок авторы предлагают применить вариант последовательного набора команды на двух пультах, отличающихся друг от друга конструктивно и характером набора команды.
В качестве основного пульта лучше всего применять пульт, совмещенный со щитом сигнализации. Вторым пультом может быть либо кнопочный, либо компьютерный. Однако виртуальная мнемоническая схема компьютерного пульта не должна повторять начертание основного щита.
Остановимся на других причинах, из-за которых основным щитом желательно иметь стационарный щит, а не виртуальный. Реализация виртуального щита в системе АСТМУ-А в зависимости от числа энергокругов и частей каждого энергокруга требует значительного числа мониторов с одновременно открытыми окнами различных частей кругов, что приводит к увеличению излучения. Так, для виртуального щита участка Москва — Голицино требуются шесть мониторов. Кроме того, необходимы управляющий, связной и резервный компьютеры.
Учитывая, в первую очередь, двенадцатичасовую продолжительность смены работы энергодиспетчера на дистанциях электроснабжения и снижение общей надежности после увеличения числа компьютеров, желательно сделать так, чтобы их было немного. Более того, обслуживающий персонал обращаться к ним должен как можно реже.
еперь рассмотрим возможные способы повышения
безошибочности действия аппаратной части системы телемеханики при передаче телесигнала. В системах типа ЭСТ-62 применен конструктивный способ, предполагающий блокирование ошибочных переключений, которые могли быть вызваны, в первую очередь, помехами в линиях связи, а также кратковременными сбоями в аппаратных частях как диспетчерского, так и контролируемых пунктов.
Для этого в данных системах предусмотрены генерация, передача и прием двух идентичных кодовых серий для каждого переключения коммутируемых аппаратов. Блокирование возможных ошибочных переключений от воздействия помех в линиях связи при двойных кодовых сериях с большой степенью достоверности уже выполняется.
Что касается возможных ошибочных переключений высоковольтных коммутируемых аппаратов из-за сбоев в работе, то применение двойных кодовых серий не блокирует такие переключения. Например, если вместо заданной оператором кодовой серии в аппаратуре диспетчерского пункта создана и послана в линию связи ошибочная кодовая серия, то и вторая кодовая серия получится ошибочной, подобной первой. Значит, в линию связи будут посланы две идентичные кодовые серии, которые могут привести к несанкционированному переключению высоковольтного аппарата.
Аналогично может произойти несанкционированное переключение и при ошибочных функционированиях приемной аппаратуры на контролируемых пунктах. Такие случаи наблюдали при искусственной расстройке аппаратуры: наличие системы двойных кодовых серий, естественно, никак не спасало от неправильных переключений!
Предполагая, что степень безошибочной работы аппаратуры довольно низка по отношению к поставленным требованиям, авторы предлагают дублировать все основные узлы телеуправления, каналы формирования кодовых посылок на диспетчерском пульте, каналы линий связи и приема посылок на контролируемых пунктах.
Дублирующие блоки аппаратуры, как и пульты, не должны быть одинаковыми. Они могут отличаться друг от друга как структурой построения, так и, по возможности, способами кодирования. Желательно, чтобы каналы связи были различных типов. Дублирующая и основная аппаратуры должны иметь автономное питание.
Для того чтобы достичь требуемой степени безошибочности создания и прохождения сигнала телеуправления, в цепи устанавливают два логических коньюнктора (см. рисунок). Первый из них, расположенный на выходах пультов телеуправления, должен давать разрешение на формирование кодовых посылок в каждом из дублирующих каналов диспетчерского пункта только в случае правильного набора оператором выбранного телесигнала на обоих пультах и правильного функционирования самих пультов.
Второй, размещенный на выходах логических цепей основного и дублирующего каналов контролируемого пункта перед цепью коммутации высоковольтного аппарата, должен давать разрешение на исполнение полученного на контролируемом пункте телесигнала (исполнение заданной коммутации высоковольтного аппарата) только при правильном прохождении одинаковых посылок по двум параллельным системам упомянутых каналов. Различное построение каждой из параллельных систем каналов гарантирует, что любой сбой не вызовет несанкционированного переключения высоковольтной аппаратуры.
В арсенале диспетчерского пункта желательно иметь, по крайней мере, один рабочий компьютер и один резервный. В первую очередь, на компьютеры следует возлагать традиционные задачи: учет и архивирование действий оператора, в том числе допускаемых разобщений дублирующих каналов в ситуациях, близких к аварийным, учет нормально заданного и фактического состояний объектов, учет данных телеметрической информации, фильтрацию по различным признакам информации при просмотре и распечатывании. В ряде случаев это могут быть подсказки оператору, а также другие задачи рутинного характера.
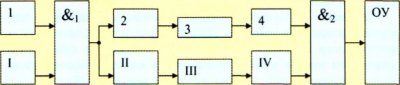 Схема передачи сигнала телеуправления:
Схема передачи сигнала телеуправления:
1 и I — основной и дублирующий пульты управления; 2 и II — основной и дублирующий каналы формирования кодовых посылок на диспетчерском пункте; 3 и III — основная и дублирующая линии связи; 4 и IV — основной и дублирующий каналы приема кодовых посылок на контролируемом пункте; &1 и &2 — первый и второй коньюнкторы; ОУ — объект управления (высоковольтный коммутируемый аппарат)
Следует отметить, что при архивировании сигналов телеуправления, задаваемых диспетчером, следует включать в память набор задания на дублирующих друг друга пультах только по разрешающему сигналу выхода первого коньюнктора. Тем самым будут исключены из памяти ошибки оператора, не вызывающие непредусмотренных сигналов. Для диспетчера подобное может стать некоторой психологической разгрузкой.
Авторы возражают против использования компьютерных программ для автоматизации каких бы то ни было переключений высоковольтных аппаратов. В сочетании с реальной ненадежностью компьютерной техники это может создавать потенциальную опасность для персонала и приводить к цепным реакциям отключений потребителей.
Не вызывает возражений дублирование в окнах на мониторе состояния телесигнализации, имеющейся на стационарном пульте-щите. В рабочем компьютере должна храниться информация в виде окон отдельных участков электроснабжения, с помощью которых можно вызывать картину сигнализации и осуществлять телеуправление. И то, и другое допускается как запасной вариант. В любом случае телеуправление следует выполнять от двух дублирующих друг друга пультов.
, наконец, еще одно соображение. С развитием электрификации увеличивается число контролируемых пунктов, приходящееся на километр пути. Расширяется диапазон объектов на них, в том числе появляются контролируемые пункты, имеющие лишь три—четыре объекта!
Поэтому при создании систем телемеханики желательно предусматривать гибкое аппаратное изменение, что позволит избавиться от схемной избыточности. Одним из вариантов решения может быть применение для аппаратов контролируемых пунктов таких модулей, которые по числу воспринимаемых сигналов телеуправления (теле-сигнализации) соответствуют ряду двоичных чисел, например, 4, 8, 16, 32 или 2, 4, 8, 16, 32.
Может возникнуть вопрос: раз применяют дублирование, то почему бы не предложить мажоритарный принцип выбора правильного сигнала, задавая нечетное число параллельно включенных аппаратов, например, три, и определять правильный сигнал по большинству одинаково прошедших через параллельные аппараты сигналов?
Ответ напрашивается сам собой. Мажоритарный принцип требует увеличения аппаратуры по сравнению с дублированием, как минимум, в полтора раза. Он применяется в тех случаях, когда невозможно повторно послать сигнал, если первый не прошел из-за сбоя в одном из параллельных каналов. При дальнейшем развитии техники применение мажоритарного принципа в системах телемеханики электроснабжения, по мнению авторов, станет реальным.
Ю.П. ВАСИЛЬЕВ, Н.С. ЕРЛЫКОВ, П.Н. ЕРЛЫКОВ,
г. Санкт-Петербург



