



|
|
|
|
#1 (ссылка) |
|
Создатель







Регистрация: 19.12.2009
Адрес: Россия
Возраст: 45
Сообщений: 1,267
Поблагодарил: 37 раз(а)
Поблагодарили 1417 раз(а)
Фотоальбомы:
2972 фото
Репутация: 60
|
Тема: [Статья] Электробалластер ЭЛБ-1Электробалластер ЭЛБ-1 ЭЛБ-1 (рис. 5.7) предназначен для подъемки пути с рельсами не тяжелее Р65 и деревянными шпалами. Он состоит из двух ферм 2 (ферма № 1) и 21 (ферма № 2), соединенных между собой междуферменным шарниром 19. На фермах расположены все рабочие органы машины -электромагнитный подъемник 18 с механизмами 5 подъема и опускания магнитов, 7 — перекоса, 4 — сдвига пути, 6— подъема балластерных рам, 10 — подъема дозатора 16 и 8 — поворота его крыла, рельсовые 15 и шпальные 17 щетки. Хвостовая часть фермы № 2 у тележки 22 для устойчивости загружена чугунными отливками. Ферму № 2 (ферма № 1), где расположен электромагнитный подъемник, называют фермой рабочего пролета. Ферма 21 (ферма № 2) является направляющей, так как, опираясь на две тележки 20 и 22, она направляет при движении ферму 2, опирающуюся только на одну тележку 14 и на консоль фермы № 2. Питание всех электродвигателей механизмов электробалластера обеспечивает электростанция 12 переменного тока, установленная в машинном отделении 13. Там же размещен машинный преобразователь 11 для питания постоянным током электромагнитного подъемника 18. Всеми механизмами управляют с пульта 9 управления дозатором и центрального пульта 3. Электробалластер оборудован автоматическими и ручными тормозами, звуковыми сигналами, электроосвещением помещений и рабочих органов. При следовании машины бригада размещается в будке 1. В ней же хранятся инструменты и инвентарь. Междуферменный шарнир электробалластера предназначен для обеспечения вписывания его в кривые участки пути, безопасного следования по переломам профиля и участкам с изменением возвышения одной рельсовой нити по отношению к другой. Геометрическая схема соединения ферм электробалластера (рис. 5.8) обеспечивает его вписывание в кривые участки пути с сохранением положения электромагнитного подъемника по оси пути. В настоящее время электробалластеры оборудованы усиленными междуферменными шарнирами (рис. 5.9, а), у которых кронштейны сварены из двух листов, а диаметр шаровой части оси увеличен до 220 мм. Ферма № / опирается через свой кронштейн, полусферы / и 4 на шаровую часть оси 2 , которая через пяты 3 и кронштейн передает эту нагрузку на ферму № 2. Оси, полусферы и пяты унифицированы с аналогичными деталями электробалластераЭЛБ-Зм и щебнеочистительных машин ЩОМ-Д и ЩОМ-4. Междуферменные связи (рис. 5.9, 6) служат для восприятия усилий, возникающих при перемещении ферм относительно друг друга вокруг шарнира, а также для возвращения фермы № 1 в установленное среднее положение относительно фермы № 2. Они состоят из тяг /, пружин 3 и регулировочных муфт 2. Электромагнитный подъемник (рис. 5.10) -главный рабочий орган электробалластера. Он предназначен для подъема, сдвига и перекоса рельсо-шпальной решетки и удержания ее в поднятом положении во время движения машины. Для захвата рельсов он снабжен четырьмя электромагнитами, по два на каждую рельсовую нить. Грузоподъемность каждого электромагнита 75 кН. Электромагниты 1 подвешены к траверсе 5 посредством серьги 4 и валика 3. Такая подвеска дает возможность каждому электромагниту поворачиваться в вертикальной и горизонтальной плоскостях вокруг горизонтальной и вертикальной осей валика и серьги. Траверса 5 также шарнирно подвешена к поперечной балке 8 при помощи валика 6 и вилки 7. Шарнирная подвеска магнитов и траверсы позволяет электромагнитам самоустанавливаться по изогнутым поверхностям поднятых рельсовых нитей и вписываться в кривые участки пути. Электромагнит состоит из стального литого корпуса-ярма, на сердечники которого установлено пять катушек. К сердечникам ярма привинчены полюсные решетки. При подъемке пути электромагниты, удерживая поднятые рельсовые нити, катятся по ним на роликах 2 (по два на каждый электромагнит). Ролик магнита (рис. 5.11) предохраняет полюсные решетки от износа и облегчает передвижение электробалластера. Зазор между полюсными решетками и головкой рельса должен быть не более 1 мм. При большем зазоре грузоподъемность магнита снижается. Величина зазора регулируется роликом 4, для чего его ось / опирается на корпус магнита через эксцентриковые втулки 5 (эксцентриситет составляет 3 мм), закрепленные на оси при помощи шпонок 10. При повороте оси / ролика вправо он опускается, увеличивая зазор, а влево поднимается, уменьшая его. На шкале 8, прикрепленной к корпусу магнита, указаны величины зазоров, соответствующие различным положениям ролика. Дробные доли миллиметра (с точностью до 1,3 мм) получают постановкой фиксирующего болта 2 в одно из отверстий 9, засверленных и нарезанных в корпусе полумагнита. Величина зазора читается против выступа, на шайбе <3, вращающейся совместно с осью 1 ролика благодаря шпонке 10. Ролик опирается на ось 1 через конические роликоподшипники 7, расстояние между которыми фиксируется дистанционной трубкой 6. Рабочие операции электромагнитного подъемника — подъемку, сдвиг и перекос пути — выполняют соответственно механизмы подъема, сдвига и перекоса пути.  Механизм подъема пути состоит из электродвигателя 24 (см. рис. 5.10), соединенного полужесткой муфтой с червячным редуктором 23. Червячная шестерня редуктора является одновременно гайкой винта 21, который шарнирно при помощи вилки и валика 22 соединен с траверсой 19 подъемного механизма. Траверса перемещается в направляющих кронштейнах 20. К ее концам прикреплены две параллелограммные тяги 18, к которым подвешена поперечная балка 8 с траверсами 5 и электромагнитами 1. Траверса 19, параллелограммные тяги 18 и участок балки 8 между точками прикрепления тяг образуют шарнирный четырехугольник, постоянно сохраняющий параллельность своих сторон. Положение шарнирного четырехугольника определяют рычаг 17, траверсы 19, ползун 16 механизма перекоса пути и каретка 12 механизма сдвига пути. По схемам (рис. 5.12, а, б) можно проследить работу механизма подъема. Оси рычага 1 и ползуна 2 совмещены с вертикальной осью машины. Траверса 4, жестко закрепленная перпендикулярно оси рыча1а 1, находится в горизонтальном положении, одновременно, в шарнирном четырехугольнике тяги 3 отвесны, а балка 8 горизонтальна. При включении электродвигатель 6 приводит во вращение червяк и червячную шестерню редуктора 7. Червячная шестерня поднимает или опускает (в зависимости от направления вращения электродвигателя) винт 5, который в свою очередь поднимает или опускает траверсу, тяги и балку с электромагнитами и рельсо-шпальной решеткой. При подъеме путевой решетки ползун 2 перемещается в пазу рычага 1. Полный ход механизма подъема равен 400 мм. Это обеспечивает опускание магнитов на 50 мм ниже уровня стоянки тележек (см. рис. 5.7), захват путевой решетки, имеющей местную просадку до 50 мм, и подъем магнитов с путевой решеткой на 350 мм выше этого уровня. Контроль за величиной подъемки пути ведут по шкале указателя подъема пути, находящегося в кабине центрального пульта управления. Во всех механизмах электробалластера применены специальные червячные редукторы (рис."5.13). Конструкция их однотипна. Отличаются они лишь своими параметрами в зависимости от передаваемой мощности и передаточного числа. Редуктор состоит из стального корпуса 3, в котором расположен червячный вал 4, опирающийся на два подшипника 5. Гнезда в корпусе для установки подшипников закрыты крышками 6. Крышки снабжены уплотнительными войлочными кольцами 7. Один конец червячного вала заканчивается квадратным хвостовиком для прокручивания редуктора вручную. Ручной привод применяют для приведения рабочих органов в транспортное положение, если нет электроэнергии или вышел из строя электродвигатель. На другом конце червячного вала на шпонке закреплена одна половина соединительной цепной муфты 2. Другая ее половина 1 закреплена на валу электродвигателя. Червячный вал 4 зацепляется с червячным колесом 12, ступица которого имеет трапецеидальную резьбу. В него заводится винт S. В редукторах механизмов сдвига и перекоса пути в ступице червячного колеса резьбы нет, цилиндрический конец винта закреплен в нем гайкой и шпонкой, поэтому винт продольного перемещения не имеет. Ступица червячного колеса расположена в радиальных подшипниках 10 и упорных 18. Корпус редуктора с одной стороны имеет фланец для закрепления его на опорной площадке фермы. С другой стороны к редуктору прикреплена болтами крышка 13 с одним радиальным шарикоподшипником. Между упорными и радиальными подшипниками установлены распорные кольца 17; они и крышка 15 обеспечивают регулировку нормального зацепления червячного колеса и червяка, а также передачу осевых нагрузок на корпус редуктора. Между крышками 13 и 15 находятся регулировочные прокладки 14. В крышке и фланце корпуса установлены уплотнительные кольца 7 и 16, предохраняющие подшипники от загрязнения и предотвращающие утечку масла из корпуса. Уплотнение со стороны фланца регулируется нажимной вгулкой 9, имеющей резьбу. Для наполнения редуктора свежей смазкой и спуска отработавшей смазки служат отверстия в корпусе, закрываемые пробками 11.  Механизм сдвига пути электробалластера предназначен для непрерывного или выборочного перемещения рельсо-шпальной решетки в плане одновременно с ее подъемкой, а также для регулировки электромагнитного подъемника при вписывании его в переходные кривые и для установки магнитов на голо'вки рельсов при зарядке электробалластера. Усилие сдвига на путевую решетку передают реборды роликов электромагнитов. Благодаря их шарнирной подвеске оба ролика передают одинаковое горизонтальное усилие. Механизм сдвига пути состоит из электродвигателя 10 (см. рис. 5.10), редуктора 11 и каретки 12, которая может перемещаться по балкам 9, увлекая за собой параллелограммные тяги 18. При смещении тяг 18 сдвигается также поперечная балка 8 с электромагнитами и путевой решеткой, при этом они сохраняют параллельность траверсе 19 подъемного механизма, так как она удерживается рычагом 17. На рис. 5.12, в механизм сдвига показан в положении, когда путь сдвинут на максимальную величину, равную 150 мм. Механизм перекоса пути предназначен для обеспечения заданного взаимного положения рельсовых нитей по уровню при подъемке на прямых и кривых участках пути.  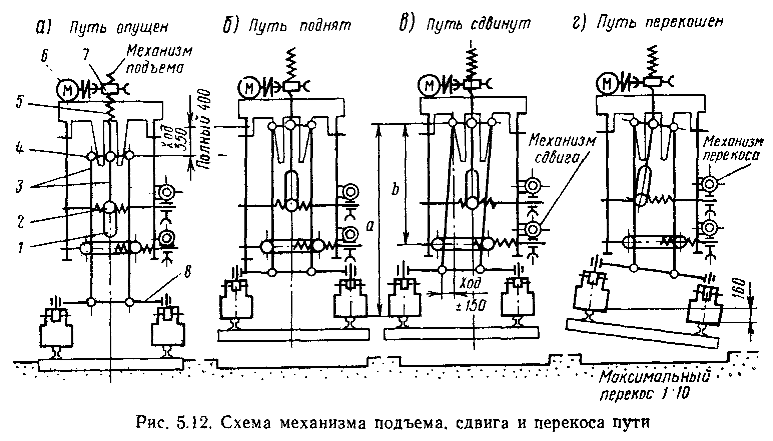 Механизм перекоса состоит из электродвигателя 13 (см. рис. 5.10), типового червячного редуктора 14, винта 15 и ползуна 16, находящегося в вертикальных пазах рычага 17 траверсы подъемного механизма. После включения электродвигателя начинает вращаться винт 15 и по нему перемещается ползун 16, увлекая за собой рычаг 17. Последний поворачивает на необходимый угол вокруг валика 22 траверсу 19, а вместе с ней поперечную балку 8 с электромагнитами и путевой решеткой, создавая заданное возвышение одной рельсовой нити над другой. На рис. 5.12 , г механизм перекоса показан в положении, когда левая рельсовая нить поднята выше правой на 160 мм. Это возвышение соответствует углу наклона плоскости пути к горизонту, тангенс которого равен 1/10. 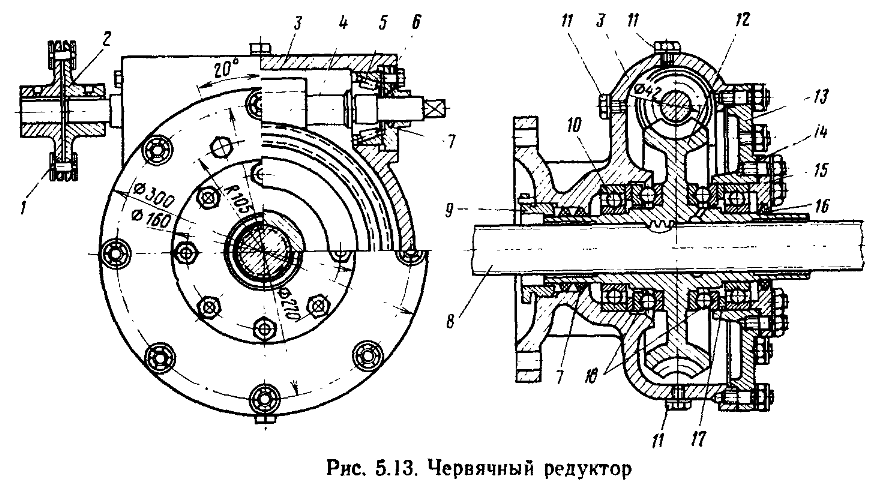 Электробалластер оборудован устройством для выключения рессор ходовых тележек, исключающее влияние на качество подъемки пути раскачивания фермы № 1 на рессорах. Балластерные рамы предназначены для закрепления на них стальных прутков диаметром 12—16 мм, называемых струнками, служащих для планировки и рыхления балласта под поднятой рельсо-шпальной решеткой, а также для выдавливания песчаного балласта в шпальные ящики при неподнятой решетке для опускания пути. 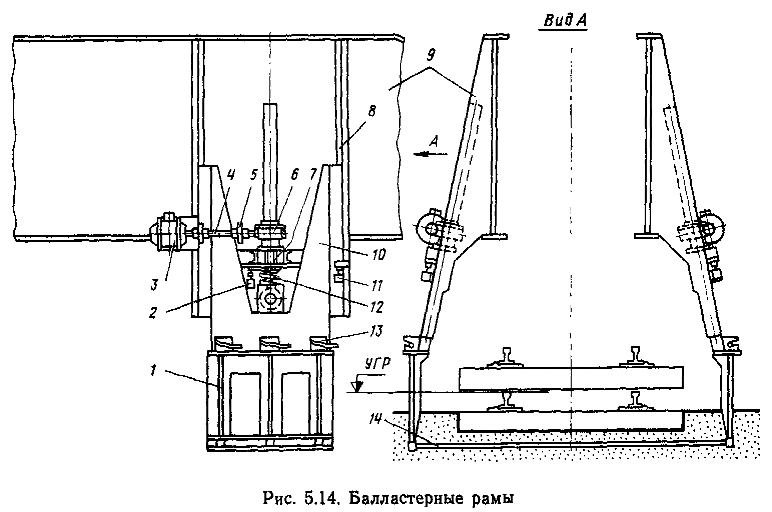 Балластерная рама (рис. 5.14) имеет подвижную раму 10, которая при помощи механизма подъема и опускания может перемещаться по направляющим 8, закрепленным на ферме 9. Струнки 14 закреплены в нижней балке подвижной рамы штырями 1. Механизм подъема и опускания балластерной рамы состоит из электродвигателя 3, соединенного муфтами 5 и промежуточным валом 4 с типовым червячным редуктором 6. Ступина червячного колеса редуктора 6 является гайкой, в которую входит винт 7. В месте соединения винта 7 с подвижной рамой установлена пружина 12, служащая ограничителем максимальной силы нажатия механизма опускания на подвижную раму 10, а также амортизатором при наезде на небольшие препятствия. При достижении усилия на раму, равного 16 кН, пружина 12 сжимается примерно на 25 мм и рычажком надавливает на концевой выключатель 2, контакты которого размыкаются и выключают привод механизма опускания рамы. Концевой выключатель 11 ограничивает подъем балластерной рамы вверх. При работе рамы опускают таким образом, чтобы струнки 14 находились ниже подошвы наиболее толстых шпал примерно на 100 мм. Струнки закрепляют поворотом штырей 1 в винтовых ручьях стаканов 13. Для контроля за положением балластерных рам на центральном пульте управления имеются механические указатели с канатным приводом, аналогичные указателям механизма подъема. Дозатор предназначен для дозировки балласта, грубой оправки балластной призмы, срезки обочин земляного полотна, а также для перераспределения балласта в продольном и поперечном направлениях по отношению к оси пути, срезки лишнего балласта и других работ. Электробалластер ЭЛБ-I оборудован двумя дозаторами двустороннего действия, по одному на фермах Ml и №2. Дозатор (рис 5.15) состоит из щита 14, двух крыльев 12, корневыми частями шарнирно соединенных со щитом, и подкрылков 10. Для управления дозатором имеются механизмы наклона крыла 8, подъема и опускания щита дозатора 4, поворота крыла 5 с редуктором 3, а также аппаратура управления электродвигателями и контроля положения дозатора. Щит дозатора представляет собой коробку, сваренную из листовой стали толщиной 6—8 мм, снабженную внутри ребрами жесткости и направляющими для перемещения щита по двум опорным стойкам 15, которые прикреплены к ферме машины. Он соединен валом 6 и карданным шарниром 7 с винтами типовых редукторов механизмов подъема и опускания дозатора. Крыло дозатора состоит из корня крыла 13, собственно крыла 12, секторного ножа 11, подкрылка 10 и параллелограммной тяги 9. Наклон крыла осуществляет механизм наклона 8. Для наклона крыла винт перемещают вверх. При этом часть крыла, связанная с винтом, также поднимается, поворачивая крыло вокруг шарнира 2 и создавая нужный наклон крыла. При любых наклонах крыла в вертикальной плоскости подкрылок 10 остается параллельным своему первоначальному положению. Это достигается благодаря тому, что точки крепления подкрылка — шарнир 1 и шарнир параллелограммной тяги 9 на подкрылке — образуют с шарниром 2 и вторым шарниром тяги 9 на корне крыла параллелограмм. Одна сторона параллелограмма, связанная с корнем крыла, сохраняет постоянное направление, поэтому другая сторона, связанная с подкрылком, всегда ей параллельна. Нижняя грань подкрылка в исходном положении горизонтальна, поэтому и при любом наклоне крыла она горизонтальна. Крыло поворачивают механизмом 1 (рис. 5.16) поворота, винт которого соединяется шарнирно с рейкой 3, сцепленной с шестерней 4. Последняя посажена на вал поворота крыла и связана с ним скользящей шпонкой. В зависимости от направления вращения электродвигателя винт перемещается влево или вправо. Перемещение винта и связанной с ним рейки 3 вызывает поворот шестерни 4, а следовательно, и вала механизма поворота. Поворот вала передается на крыло карданным валом 5 и валом петлевого шарнира 6, с которым крыло связано срезными штифтами и сегментными упорами. Такое соединение крыла с валом петлевого шарнира предохраняет самотормозящийся механизм поворота крыла от поломок при обрыве стяжек крыла или в других случаях перегрузки. Дозатором управляют с поста 2. Дозатор поднимают и опускают два механизма 4 (см. рис. 5.15). При этом щит дозатора перемещается по опорным стойкам 15. Ход щитов дозаторов: фермы № 1 выше головки рельса 300 мм, ниже головки рельса 100 мм; фермы № 2 выше головки рельса 250 мм, ниже головки рельса 100 мм.  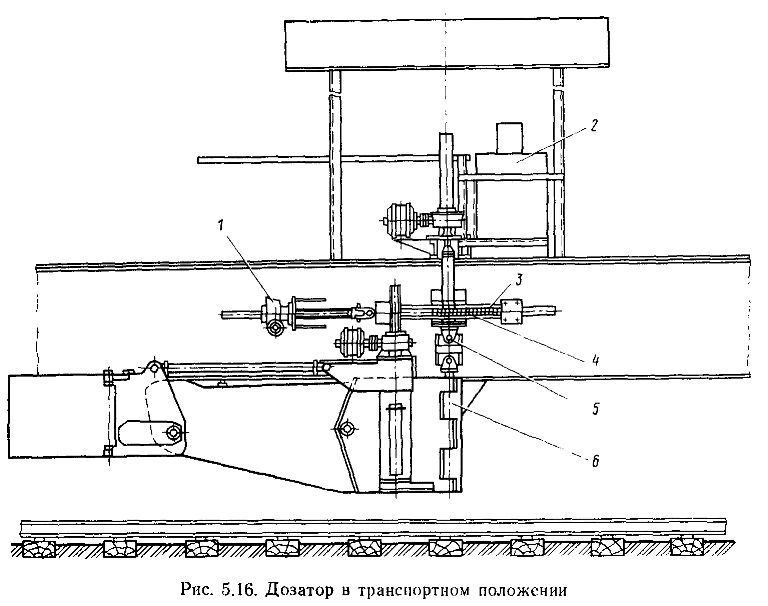 Рельсовые щетки предназначены для очистки головок рельсов от балласта, которым они засыпаются при дозировке, чтобы обеспечить безопасный проход ходовых тележек электробалластера. На ЭЛБ-1 (см. рис 5.7) установлены четыре пары рельсовых щеток (по две пары на каждый дозатор). Они расположены на машине таким образом, что при работе любым дозатором в любую сторону можно очищать головки рельсов перед тележкой, которая первой проходит по задозированному участку. Рабочим органом рельсовой щетки является плужок. Поднимают и опускают рельсовую щетку вручную винтовым механизмом. В опущенном положении рельсовую щетку постоянно прижимает к головке рельса пружина, которая одновременно смягчает удары из-за неровностей пути. Шпальные щетки предназначены для сметания балласта, оставшегося на верхних постелях шпал во время подъемки пути. На электробалластере установлены две шпальные щетки, по одной с каждой стороны электромагнитного подъемника. Поднимают и опускают шпальные щетки вручную при помощи винтового механизма.
__________________
Зарегистрируйтесь, чтобы скачивать файлы. Внимание! Перед скачиванием книг и документов установите программу для просмотра книг отсюда. Примите участие в развитии ж/д вики-словаря / Журнал "АСИ" онлайн Книги по СЦБ | Книги путейцам | Книги машинистам | Книги движенцам | Книги вагонникам | Книги связистам | Книги по метрополитенам | Указания ГТСС Если не можете скачать файл... / Наше приложение ВКонтакте / Покупаем электронные версии ж.д. документов Последний раз редактировалось Толян; 15.08.2010 в 16:33. |
|
|
Цитировать 0 |
| Поблагодарили: |
Данный пост получил благодарности от пользователей
|
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| [Статья] Техническое обслуживание устройств СЦБ - на уровень новых задач | Толян | Статьи по СЦБ | 1 | 16.07.2014 14:57 |
| =Курсовая работа= Электробалластер ЭЛБ ЗМК | Толян | Студенту-путeйцу | 2 | 07.01.2014 16:05 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , , , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|








