



|
|
|
|
#1 (ссылка) |
|
Crow indian







Регистрация: 21.02.2009
Возраст: 41
Сообщений: 30,443
Поблагодарил: 398 раз(а)
Поблагодарили 6046 раз(а)
Фотоальбомы:
2624 фото
Записей в дневнике: 905
Репутация: 126141
|
Тема: [02-2009] Поездом управляет автоматикаПоездом управляет автоматика Руководство ОАО «РЖД» поставило перед локомотивщиками сложный, но в то же время очень важный вопрос: назрела острая потребность перехода к массовому вождению поездов без помощника машиниста. Очевидно, что эту задачу одними только приказами и административно-командными методами не решить. Какие же технические способы обеспечат поддержку труда машиниста, который уже завтра останется в кабине один? В январском 2009 г. номере журнала «Локомотив» по проблеме работы в одно лицо высказали свое мнение начальник Департамента локомотивного хозяйства Ю.А. Машталер и начальник Департамента дальних пассажирских перевозок ОАО «РЖД» Г. В. Верховых. Продолжаем публикацию материалов, посвященных вождению поездов машинистом без помощника. Прогресс в области локомотивной автоматики не стоит на месте. Сейчас локомотивщики имеют в своем распоряжении такие системы, как КЛУБ-У, САУТ-ЦМ, УСАВПП и др. Однако исключить проезды запрещающих сигналов, повысить безопасность движения, улучшить условия работы машиниста в полной мере не удается. Не случайно среди машинистов уже сформировалось определенное отношение к существующим системам безопасности и автоведения. Это отношение настороженно-негативное. И дело даже не в недостаточной надежности аппаратуры. Машинист не может полностью довериться автоматике, так как не знает, как она поведет себя в следующую минуту. А вдруг система по какой-то причине не восприняла временное ограничение скорости или при движении по КЖ она начнет набирать позиции? В конце октября 2008 г. после проведения капитального ремонта в эксплуатацию поступил электровоз ЧС7-227, оборудованный системой ЕКС-2. Это усовершенствованный и доработанный вариант комплекса ЕКС, объединившего в себе автоведение и систему обеспечения безопасности движения, с учетом недостатков и замечаний машинистов, выявленных в эксплуатации. Причем в отличие от прежних вариантов, это не набор самостоятельных устройств, установленных на одном локомотиве, а действительно единая система с общими блоками, датчиками, информационной цепью. В рапорте машиниста А.Д. Семенова начальнику локомотивного депо Москва-Пассажирская-Курская от 20.11.2008 г. сказано следующее: «...Во время эксплуатации мной были отмечены положительные достоинства системы: грамотное графическое отображение на дисплее всего процесса следования, указание расположения светофоров и их литер, расположенные впереди переезды, ПОНАБы, платформы, профиль пути, диаграмма расчетной и фактической скорости, возможность контроля ограничений по предупреждениям, изображение поезда на километровой сетке. Система расчетливо, в соответствии с заданием, в автоматическом режиме применяет торможение как на пневматике, так и на ЭПТ. При угрозе превышения допустимой скорости система автоматически применяет служебное торможение, а снизив скорость до контролируемой величины, отпускает тормоза. Более понятным и доступным стало управление настройками автоведения. Часы устройства ТСКБМ не мешают в процессе управления, так как подтверждать бодрствование можно подачей свистка тифона, сменой позиции контроллера. Система четко обеспечивает прохождение станций по заданному времени...». Тут следует отметить, что одним из новаторских решений стал интеллектуальный алгоритм контроля ошибок, вызванных так называемым человеческим фактором. В случае если машинист отвлекся или вовсе уснул, интеллектуальная система потребует подтверждения бдительности текстовым сообщением на дисплее. При отсутствии реакции на требование о подтверждении бдительности, т.е. если машинист не нажмет РБ, система выполнит ступень торможения вплоть до остановки поезда. Если же после остановки поезд придет в движение в режиме скатывания, система остановит его экстренным торможением. Но даже если машинист вовремя придет в себя и отменит автоматически примененное торможение, ЕКС даст выполнить отпуск, однако в течение 10 мин не позволит перейти на автоведение, контролируя безопасность в режиме советчика и вынуждая машиниста выполнять действия по управлению поездом. Другим важным отличием новой ЕКС-2 от прежних вариантов систем автоведения стал общий графический дисплей. На нем в масштабе машинист может видеть участок пути на 4 км вперед с обозначением светофоров, станций, различных железнодорожных объектов, уровнем разрешенной скорости, в том числе и по временным ограничениям. Также он может наглядно контролировать, как система намерена вести поезд, какую скорость поддерживать, как выполнять подъезд к запрещающему сигналу, когда применять торможение. Расположенный под дисплеем блок индикации информации по безопасности (БИЛ-ЕКС) заменил собой блоки индикации подсистем КЛУБ-У и САУТ-ЦМ. По показаниям дисплея и БИЛ-ЕКС машинист теперь может безошибочно определить, какая из подсистем вмешалась в его работу и в чем причина такого вмешательства. Модуль индикации, состоящий из дисплея и БИЛ-ЕКС, расположен в кабине на традиционном месте скоростемера. Машинисту теперь нет необходимости поворачивать голову то в одну сторону, то в другую, отвлекаясь от наблюдения за свободностью пути. Свечение этих приборов плавно регулируется: при ярком солнце информация не теряется и ночью «по глазам не бьет». В середине ноября 2008 г. система была представлена приемочной комиссии ОАО «РЖД». В комиссионной поездке на участке Москва — Владимир — Москва с поездами № 110 и 21 принимали участие начальник технического отдела ЦТ ОАО «РЖД» и главный инженер службы локомотивного хозяйства Московской дороги. Как опытные локомотивщики эти руководители по достоинству оценили потенциальные возможности ЕКС-2. Решением приемочной комиссии ЧС7-227 с ЕКС-2 введен в эксплуатацию и с конца ноября 2008 г. водит пассажирские поезда на участке Москва — Владимир. А начиналось все в 2002 г., когда руководство тогда еще МПС России, понимая необходимость и востребованность современного микропроцессорного комплекса на локомотиве, дало задание ведущим научно-производственным подразделениям отрасли разработать такую систему. Головным в этой работе был определен Отраслевой центр внедрения. К решению непростой задачи приступили ведущие ученые и специалисты отрасли. В кратчайшие сроки были определены главные направления разработки. Одним из основных принципов стало использование накопленного опыта, существующих и успешно работающих на сети дорог технических решений, их рациональное объединение и на этой основе создание нового. Это позволило уже в 2003 г. создать Единую комплексную систему управления и обеспечения безопасности движения первой очереди, названную ЕКС-1. Она представляла собой объединенные общим информационным интерфейсом системы автоведения, САУТ-ЦМ, КЛУБ-У, ТСКБМ. Безусловно, создание ЕКС-1 стало знаковым шагом, который определил правильность направления развития локомотивной микропроцессорной автоматики. Однако такое объединение систем, разработанных как автономные и работающие независимо друг от друга, имело и ряд недостатков. Многократное неоправданное дублирование датчиков, несогласованность при выборе управляющих воздействий, перегруженность кабины всевозможными индикаторами, табло и дисплеями, повышенная себестоимость — вот лишь некоторые из недостатков. И с 2004 г. коллектив разработчиков ЕКС приступил к созданию второй очереди проекта — ЕКС-2. 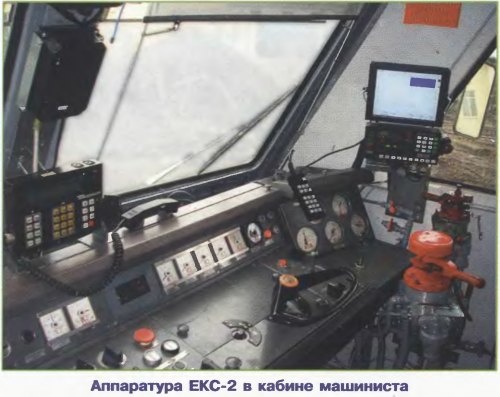 та система стала следующим шагом к созданию действительно единого комплекса устройств, обеспечивающих автоматизированное ведение поезда и контроль за безопасностью движения. Были разработаны общесистемные блоки управления торможением, определения точной скорости и координаты, высокоскоростной интерфейс стандарта CAN-250. Разрозненные многочисленные информационные блоки в кабине машиниста заменил общий графический дисплей с выделенным блоком информации по безопасности. В том виде, как она выполнена на ЧС7-227, система ЕКС-2 представляет собой комплекс, состоящий из подсистем автоведения, САУТ-ЦМ, доработанного для использования одного комплекта на двухсекционном электровозе устройства КЛУБ-У и интеллектуальной системы ТСКБМ. Этот комплекс позволяет обеспечить автоматизированное ведение поезда, когда машинист и автоматика функционально дополняют и контролируют друг друга. Зачастую можно слышать мнение опытных машинистов, что «я проведу гораздо лучше автоведения». Однако машинист должен помнить, что никакая автоматика не может заменить человека: такая задача и не ставилась никогда. Создатели ЕКС-2 попытались сделать комплекс, помогающий вести поезд, снижающий нагрузку на машиниста, облегчающий работу. В результате уже сейчас на ЧС7-227 установлена система, которая способна облегчить труд машиниста, в том числе ведущего поезд без помощника, не допустить нарушений скоростного режима, вовремя подсказать о приближении к участку с ограничением скорости, переезду, устройству КТСМ. В ЕКС-2 разработчики по-максимуму попытались учесть те справедливые нарекания машинистов, которые высказывались и высказываются в адрес автоведения и ЕКС-1. Новый прибор подскажет показания путевого светофора, проследит, чтобы машинист не задремал и в то же время не станет «дергать» его в особо ответственные моменты управления поездом. А машинист, заранее видя, что система выбирает не самый рациональный режим в каком-то случае, например, при следовании по короткому блок-участку при показании путевого светофора «желтый с зеленым», получает возможность своевременно вмешаться в работу автоматики, перейти в режим советчик и вести поезд, исходя из своих знаний и опыта. шп азработчики не собираются останавливаться на достигнутом. В планах ближайшей перспективы — создание ЕКС-2 с расширенными свойствами. Это касается, прежде всего, модернизации системы управления электровозом с установкой электронного комплекса управления тяговым приводом ЕСАУП, принципиально новых подходов к внедрению диагностики на локомотиве, а также ориентированности на работу машиниста без помощника. Система должна выявить и проинформировать машиниста о возникновении неисправности, а затем позволить собрать аварийную схему, не выходя из кабины. Приборы диагностики в составе проектируемой ЕКС-2 должны при выявлении неисправности автоматически предложить машинисту вариант выхода из сложной ситуации, а по запросу еще и высветить на дисплее фрагмент электрической схемы электровоза с обозначением неисправного участка цепи. Кроме того, в ЕКС-2 планируется реализовать такие инновации, как видеонаблюдение за состоянием ВВК и нерабочей кабины, передача по радиоканалу информации о неисправностях, отключении приборов безопасности, других экстренных ситуациях. Это возможно сделать уже в ближайшей перспективе. С развитием ЕКС-2 в кабине появится ориентированный на работу в одно лицо пульт машиниста. Тогда он почувствует себя уверенно и защищенно — его надежным помощником станет ЕКС-2. Конечно, еще не все пожелания эксплуатационников удалось воплотить в ЕКС-2, но в целом машинисты депо Моск-ва-Пассажирская-Курская одобряют внедренные технические решения. Вот только сетуют на неудовлетворительное сервисное обслуживание. еобходимо также отметить, что эффективность автоведения выходит за рамки одного только локомотивного хозяйства. Это и вопросы безопасности движения, затрагивающие все хозяйства, и вопросы организации движения. Ведь основной эффект от использования автоведения должен заключаться не в экономии отдельно взятого машиниста, который «грамотным» ведением поезда с использованием особенностей профиля зачастую выбивает из графика всю позади идущую пачку поездов. Вопрос в синхронном следовании потока поездов со строгим соблюдением графика движения. Это не только безопасность, но и энергетическая эффективность — ведь такой подход исключает потери из-за нарушения графика, вынужденных неграфиковых остановок, нагона опозданий и др. Внедренные технические средства автоведения позволяют совершенствовать программный продукт, внедрять новые его версии, лучше адаптированные к реальному эффективному ведению поезда. Данное направление необходимо развивать и в этом — главная задача разработчиков. Д-р техн. наук В.М. АБРАМОВ, г. Москва |
|
|
Цитировать 14 |
|
|
#2 (ссылка) |
|
Робот

Регистрация: 05.05.2009
Сообщений: 1,496
Поблагодарил: 0 раз(а)
Поблагодарили 82 раз(а)
Фотоальбомы:
не добавлял
Репутация: 0
|
Тема: Тема перенесена |
|
|
Цитировать 0 |
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| Переездная автоматика | egor1 | Самоучитель по обслуживанию устройств СЦБ | 22 | 22.07.2014 22:30 |
| =Диплом= Автоматика и телемеханика | Декабрист-74 | Курсовое и дипломное проектирование | 27 | 26.05.2013 07:41 |
| Поездами управляет автомашинист | Admin | xx2 | 0 | 24.08.2011 20:36 |
| [10 октября 2009] Столкновение с пассажирским поездом на перегоне Селезни – Тамбов ЮВЖД | Шаэнн | Нарушения безопасности на ж/д до 2010 года | 0 | 17.04.2011 06:58 |
| Пассажирская автоматика | tiksi | Общие вопросы эксплуатации устройств СЦБ | 0 | 03.11.2010 18:38 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , , , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|










