



|
|
|
|
#1 (ссылка) |
|
Crow indian







Регистрация: 21.02.2009
Возраст: 41
Сообщений: 30,426
Поблагодарил: 398 раз(а)
Поблагодарили 6046 раз(а)
Фотоальбомы:
2624 фото
Записей в дневнике: 904
Репутация: 126141
|
Тема: [08-2022] Контроль станционной инфраструктуры диагностическими роботамиКонтроль станционной инфраструктуры диагностическими роботами МИХАЛКИН И.К., генеральный директор НИЦ ИНФОТРАНС, СИМАКОВ О.Б., НИЦ ИНФОТРАНС, первый заместитель генерального директора, СЕДЁЛКИН Ю.А., НИЦ ИНФОТРАНС, заместитель генерального директора, АТАПИН В.В., Самарский государственный университет путей сообщения (СамГУПС), канд. техн, наук, ЧЕКИН А.А., СамГУПС, старший преподаватель Аннотация. В статье представлены новые возможности контроля состояния стрелочных переводов и станционной инфраструктуры, которые становятся доступными благодаря внедрению и развитию диагностических роботов. Выполнен анализ существующей системы контроля и средств измерения станционной инфраструктуры в сравнении с предлагаемым методом. Описана технология применения диагностических роботов и структурная схема работы автономной информационно-измерительной системы. Ключевые слова: станционная инфраструктура, диагностические роботы, оперативный контур управления, плановый контур управления, ЗО-модель Железнодорожная станция представляет собой сложную систему, включающую инфраструктурные объекты, которые требуют регулярного контроля их состояния. Трудности в работе на станции современных средств диагностики, несмотря на их оснащенность новейшим оборудованием, связана с использованием отдельного локомотива, занятостью станционных путей различными составами, а также специальной технологией управления маневрами мобильного средства.  Существующая система контроля станционной инфраструктуры включает осмотры ревизорским аппаратом, комиссиями функциональных филиалов, а также под руководством начальника дороги. При этом экономическая составляющая затрат на выполнение перечисленных мероприятий является достаточно большой [1—2]. Анализ технологии осмотров показал следующие ее недостатки:
определение текущего состояния станционной инфраструктуры; выявление неисправностей, угрожающих безопасности движения поездов и требующих устранения в первоочередном порядке; определение и контроль неисправностей для предупреждения их развития и прогнозирования вероятных сроков перехода в опасное состояние; осуществление контроля за устранением выявленных неисправностей. На станции подлежат проверке главные и приемо-отправочные пути, а также стрелочные переводы. Контроль параметров на каждом из объектов выполняется по различным хозяйствам: пути, перевозок, автоматики и телемеханики, связи и радиосвязи, электроснабжения и пассажирского хозяйства. Применительно к хозяйству пути регулярно проверяется бо лее 30 параметров, преобладающая часть из которых относится к стрелочному переводу [8]. Процесс обследования стрелочных переводов достаточно продолжительный, подвержен влиянию разных факторов как со стороны лиц, осуществляющих осмотр, так и со стороны перевозочного процесса, технологии и средств измерения. Существующие средства контроля стрелочных переводов В настоящее время для контроля состояния стрелочных переводов применяют следующие методы: визуальный осмотр, включающий фото- и видеофиксацию обнаруженных неисправностей; ручные и мобильные (вагоны-путеизмери-тели, диагностические комплексы, самоходные многофункциональные комплексы на базе локомотивов) средства измерения. Ручные средства измерения подразделяются на механические (типа ЦУП разных модификаций, путевой шаблон модели 08809, штангенциркуль путевой ПШВ, шаблон КОР), автоматизированные (электронный путевой шаблон типа АПШ-ОЗМС (рис. 1), ШЕП-2, НЕВА-1, позволяющие оперативно контролировать параметры и передавать данные в ЕК АСУИ), ручные путеизмерительные тележки (типа РПИ). Основным недостатком этих приборов является то, что измерения выполняются без нагрузки, поэтому достоверность получаемых данных снижается. Таким образом, сейчас для контроля стрелочных переводов применяется достаточно большое количество средств диагностики. Однако получаемая с их помощью информация носит разрозненный характер, имеет разные достоверность, полноту и точность. Данные, фиксируемые механическими ручными средствами, частично содержатся на бумажном носителе, от автоматизированных путевых шаблонов — поступают в систему ЕК АСУИ, от мобильных средств — обрабатываются экипажем и хранятся на борту путеизмерительного средства с последующей передачей в РЦДМ. Характерной особенностью сложившейся технологии является регулярно получаемый значительный объем разнородной информации, в большой степени основанной на ручных измерениях (появляется «человеческий фактор»), а также отсутствие единого информационно-аналитического инструмента для проведения анализа, который должен решать три основные задачи: сбор диагностических данных, их верификация и накопление; анализ состояния инфраструктуры и прогнозирование ее развития на основе накопленных данных, поддержание на заданном уровне риска и своевременного планирования ремонтных работ; визуализация получаемой информации и результатов анализа в различных проекциях для принятия управленческих решений. В связи с тем, что мобильными средствами стрелочные переводы за один проезд проверить невозможно, крайне актуальным является накопление данных, их комплексирование и оценка. Новые возможности контроля состояния стрелочных переводов и станционной инфраструктуры В настоящее время формируется новый класс мобильных средств диагностики — автономные, которые можно отнести к роботизированным системам или к диагностическим роботам. Они функционируют полностью в автономном режиме и не требуют участия оператора, так как практически вся получаемая информация автоматически обрабатывается и передается по выделенному защищенному каналу для оперативного принятия управленческих решений и выработки рекомендаций. К таким средствам диагностики, эксплуатируемым на сети дорог ОАО «РЖД», относятся информационно-измерительная система (ИИС) «ИНФОТРАНС-ВЕЛАРО Rus», установленная на высокоскоростном пассажирском электропоезде «Сапсан», и ИИС «ИНФОТРАНС-Ласточка», интегрированная в пассажирский электропоезд «Ласточка» (ЭС2Г). Для контроля станционной инфраструктуры наиболее рациональным является применение диагностических роботов, которые могут быть установлены практически на любую подвижную единицу (носитель), отличаются компактностью, независимы от штатных систем подвижной единицы (используют только электропитание), позволяют существенно сократить затраты на диагностику, исключить «человеческий фактор» и проводить измерения под действующей поездной нагрузкой. Специалисты НПЦ ИНФОТРАНС при поддержке Куйбышевской дороги разработали автономную информационно-измерительную систему контроля состояния станционной инфраструктуры (ИИС КСИ), использующую принцип диагностического робота. Эксплуатационная отработка ИИС КСИ проходила на станции Кинель Куйбышевской дирекции инфраструктуры. В качестве носителя был использован маневровый локомотив ТЭМ18ДМ (рис. 2). Все оборудование робота максимально компактно, устанавливается снаружи кузова подвижной единицы, не затрагивая ее штатных систем, и способно работать в любых погодно-климатических условиях. В случае выхода из строя носителя оборудование быстро может быть переставлено на другой, обеспечивая тем самым непрерывность процесса диагностики и мониторинга. В ИИС КС входят следующие системы (см. рис. 2): центральная — осуществляет автоматическое управление аппаратурой, контроль и поддержание требуемых условий ее эксплуатации, дистанционную передачу данных, синхронизацию работы всех систем измерения, хранение информации; контроля параметров геометрии рельсовой колеи, продольного профиля; контроля поперечного профиля рельсов, геометрии стрелочных переводов; пространственного сканирования — контролирует габариты приближения строений [9]; обзорного видеонаблюдения за путем и прилегающими объектами инфраструктуры; позиционирования — измеряет пройденный путь и скорость движения, выполняет координатную привязку и позиционирование в железнодорожной и геодезической системах координат. Все системы синхронизированы между собой. ИИС КСИ может быть легко дооснащена другими необходимыми измерительными системами: видеоконтроля верхнего строения пути (АВИС КТСП), контроля контактной сети, автоматики и др. Старт работы ИИС может осуществляться автоматически одновременно с запуском локомотива-носителя или по заранее установленному графику, а также посредством подачи ручных команд от удаленного оператора по беспроводному каналу с любого устройства, имеющего стандартный web-браузер. Это позволяет диагностировать станционную инфраструктуру без влияния на перевозочный процесс, т. е. в рамках штатной маневровой работы, автоматизировать процесс контроля, получать достоверные данные в условиях взаимодействия пути и подвижного состава. Наблюдать за местонахождением диагностического робота и результатами обследования можно в специальном приложении (рис. 3). Технология применения диагностических роботов делится на два контура управления: оперативный (неотложная информация), к которому относятся опасные отступления, угрожающие безопасности движения и требующие устранения в первоочередном порядке. Данные отступления выявляются в режиме реального времени и по защищенному каналу автоматически передаются причастным работникам ОАО «РЖД»; плановый (в режиме постобработки), к которому относятся определение состояния инфраструктуры, прогнозирование развития ситуации и своевременное планирование ремонтов. В обеспечение этой задачи производится регулярный сбор получаемых данных диагностики, их верификация и накопление. Отработка новой технологии контроля станционной инфраструктуры ведется на протяжении двух лет. Ежедневно в систему хранения в автоматическом режиме передается диагностическая информация. Полученные материалы исследуются на базе аналитической платформы «InfraStation», разработанной НПЦ ИНФОТРАНС. В настоящее время в нее заложены следующие функции: оценка состояния станционных путей согласно действующим нормативным документам; получение графической диаграммы и ведомости формы ПУ-32; контроль и оценка стрелочных переводов, формирование формы ПУ-29; просмотр диагностической информации по всем подсистемам; формирование плана-графика проверки путей и стрелочных переводов. При получении полных данных по стрелочному переводу (после проезда по обоим направлениям) производится их «склейка» в ЗВ-модель перевода (рис. 4), разметка на модели измерительных сечений с учетом паспортной информации (№ проекта, марка крестовины, тип стрелочного перевода, сто-ронность и т. п.) и автоматическое определение большинства параметров. Результаты оценки стрелочных переводов визуализируются на базе online-карты по принципу «светофор». Также в автоматическом режиме составляется форма ПУ-29, количественная и качественная оценка каждого стрелочного перевода, создается план-график проверки стрелочных переводов. Набор описанных выше функций платформы постоянно расширяется и совершенствуется. 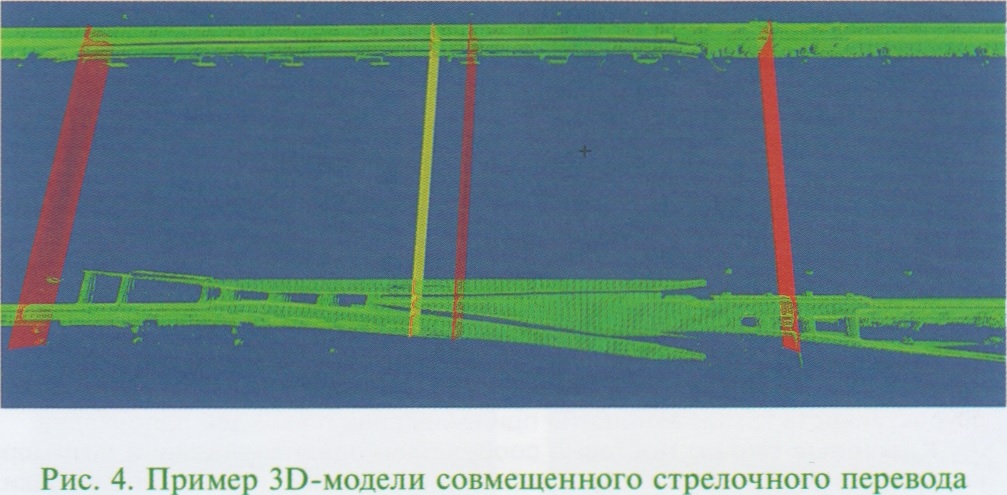 Заключение По итогам опытной эксплуатации И ИС КСИ можно сказать, что концепция диагностического робота, размещенного на маневровом локомотиве, доказала свою работоспособность и эффективность. Она позволяет существенно сократить затраты на диагностику станционной инфраструктуры, проводя ее в рамках штатной маневровой работы локомотива, получать неотложную информацию для немедленного реагирования и устранения неисправностей, осуществлять постоянный контроль состояния пути и стрелочных переводов, выполнять прогнозирование и планирование ремонтов. В настоящее время завершается разработка цифрового двойника станционной инфраструктуры [10, 11] на основе данных ИИС КСИ, решаются задачи автоматизации составления формы комиссионного месячного осмотра (АС КМО) по выявленным неисправностям технических устройств, а также представления результатов оценки каждой из измерительных систем на online-карте. Список источников 1. Михалкин И.К., Симаков О.Б. Новые задачи и принципы построения системы диагностики и мониторинга инфраструктуры ОАО «РЖД» // Путь и путевое хозяйство. 2015. № 4. С. 9—11. 2. Михалкин И.К., Симаков О.Б. Современная система диагностики инфраструктуры: тенденции развития // Вестник Института проблем естественных монополий: Техника железных дорог. 2015. № 3 (31). С. 72—75. 3. Ашпиз Е.С., Михалкин И.К., Симаков О.Б. Технология мониторинга путевой инфраструктуры // Мир транспорта. 2011. Т. 9, № 5 (38). С. 124—129. 4. Седёлкин Ю.А., Атапин В.В. Анализ состояния верхнего строения пути и земляного полотна на основе результатов обследования диагностическими средствами // Путь и путевое хозяйство. 2015. № 7. С. 13—15. 5. Атапин В.В., Чекин А.А. Анализ динамики изменения состояния железнодорожного пути с целью повышения скоростей движения // Наука и образование транспорту. 2018. № 2. С. 114—118. 6. Седёлкин Ю.А., Атапин В.В. Методология УРРАН для определения предотказного состояния инфраструктуры // Путь и путевое хозяйство. 2015. № 3. С. 8-11. 7. Седёлкин Ю.А., Атапин В.В. Новые горизонты технологии УРРАН // Путь и путевое хозяйство. 2015. № 8. С. 15—17. 8. Об оптимизации системы контроля параметров стрелочных переводов / В.М. Ермаков, Е.В. Ермаков, М.А. Егоров, Т.В. Суворова // Вестник Ростовского государственного университета путей сообщения. 2016. № 4 (64). С. 98-105. 9. Патент на полезную модель № 188071 РФ G01C 3/00. Устройство контроля расстояний до объектов железнодорожной инфраструктуры / Атапин В.В., Колпаков А.Г., Чекин А.А.; правообладатель ОАО «РЖД. № 2018144992; заявл. 19.12.2018; опубл. 28.03.2019; Бюл. № 10. 10. Симаков О.Б., Седёлкин Ю.А. Диагностика — составная часть цифровой железной дороги // Евразия Вести. 2019. № 8 (август). URL: http://eav.ru/publ l.php?publid=2019-08a07. 11. Атапин В.В., Чекин А.А., Баширов А.В. Инновации в сфере контроля состояния стрелочных переводов // Современные технологии. Системный анализ. Моделирование. 2021. № 2 (70). 128—138 с. MONITORING OF STATION INFRASTRUCTURE BY DIAGNOSTIC WORKS Mikhalkin Igor —General Director of JSC SPC INFOTRANS. Samara, Russia, i_mikhalkin@infotrans-logistic.ru Simakov Oleg — First Deputy General Director of JSC SPC INFOTRANS. Samara, Russia, simakov@infotrans-logistic.ru Sedelkin Yuri — deputy general Director for Innovative Projects of JSC SPC INFOTRANS. Samara, Russia, sedelkin@infotrans-logistic.ru Atapin Vitaliy — Director of the Institute of Automation, Information Technology and Construction, Ph.D., Senior Lecturer of the department of «Rail and railway equipment» of Samara State Transport University, lead engineer-analyst of JSC SPC INFOTRANS. Samara, Russia, vitap88@rambler.ru, atapin@infotrans-logistic.ru Chekin Artem — lector of the department «Rail and railway equipment» of Samara State Transport University, lead engineer-analyst of JSC SPC INFOTRANS. Samara, Russia, chekin@infotrans-logistic.ru Abstract. The new opportunities for monitoring the state of track switches and station infrastructure, which are becoming available thanks to the introduction and development of diagnostic robots, are presented in the article. The analysis of the existing control system and measuring instruments of the station infrastructure in comparison with the proposed method is made. The technology of application of diagnostic robots and the block diagram of the autonomous information and measurement system are described. A general description and examples of output forms of the analytical platform «InfraStation» developed by SPC INFOTRANS are given. Keywords: station infrastructure, diagnostic works, operational control loop, planned control loop, 3D model, PU-29 shape, online map, InfraStation. |
|
|
Цитировать 14 |
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| [08-2022] Актуализация документации по диагностики и мониторингу инфраструктуры | Admin | xx1 | 0 | 18.09.2022 20:00 |
| Материалы по безопасности движения поездов на УЗ и Южной ж.д. январь 2022 - июль 2022 года. | relsamaster | Нарушения безопасности на УЗ | 0 | 21.08.2022 19:38 |
| СТО РЖД 02.049-2014 - Автоматизированные системы управления технологическими процессами и техническими средствами железнодорожного транспорта | бабулер18 | ОСТы | 1 | 30.06.2021 11:36 |
| =Распоряжение= № 2615р от 5 декабря 2011 г. - Об утверждении Инструкции по оценке состояния инфраструктуры с использованием новых диагностических средств комплексной диагностики инфраструктуры РЖД (ИНТЕГРАЛ, ЭРА) | Admin | 2011 год | 1 | 31.07.2012 10:38 |
| центр диагности и мониторинга инфраструктуры ржд | laptik1 | Общие вопросы железных дорог | 0 | 18.07.2012 15:15 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , , , , , , , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|








