|
|






|
Глава 7. КОМПЬЮТЕРНОЕ
УПРАВЛЕНИЕ ЭЛЕКТРИЧЕСКОЙ ЦЕНТРАЛИЗАЦИЕЙ.
7.1 Кибернетическая модель управления и
автоматизация технологических процессов станции
Современные системы управления технологическими процессами основываются на широком использовании средств вычислительной техники и представляют собой сложные автоматизированные системы управления (АСУ), в которые включены не только технические звенья, но и контуры с участием человека. Человек-оператор является субъектом управления и поэтому от его деятельности зависит функционирование системы в целом. Его участие в контуре управления требует включения в состав АСУ технических средств, обеспечивающих взаимодействие человека с системой в процессе управления.
В общем случае (рис.7.1) система управления состоит из датчиков (Д), предоставляющих описание технологического процесса значения параметров и текущее состояние объектов контроля, т.е. обеспечивающих получение информации X(t). Второй составляющей является модель объекта управления, отображающая с определенной степенью адекватности реально существующий объект управления. В общем случае в теории систем модель учитывает не только текущее состояние, но также динамику изменений, ретроспективу с учетом взаимодействия с другими подсистемами. Располагая данными от датчиков X(t), сведениями о динамике модели M[X(t), Yn(t)], где Yn(t) - предполагаемые управляющие воздействия, а также критериями эффективности К на основе анализа человек-оператор из альтернативных вариантов управляющего решения выбирает наилучший с точки зрения цели управления. Последнее обстоятельство обуславливает наличие в системе блока принятия решений Р. После выбора наилучшего решения определяются управляющие воздействия U(t), которые поступают на исполнительные органы И.
Принципиальной особенностью рассматриваемой системы является ее функционирование в реальном масштабе времени. Это означает, что решение должно вырабатываться по мере поступающих изменений состояния датчиков. Несвоевременность формирования управляющих воздействий из-за реакции блока Р влечет снижение эффективности управления. Это приводит к сложности деятельности оператора в условиях ограниченного лимита времени на выполнение функций управления.
Вторая особенность в построении системы состоит в формировании модели управления. Ее отсутствие не позволяет решать задачу выработки альтернативных вариантов решений, а, следовательно, применить для этих целей технические средства искусственного интеллекта.
Третья особенность заключается в том, что система управления является замкнутой. Действительно, управляющее воздействие приводит к изменениям в объекте управления, что отражается в новых показаниях датчиков, т.е. возникает обратная связь между управляющим воздействием и информацией о состоянии объекта управления.
Все кибернетические системы управления с позиции включения человека в контур управления могут быть размещены между двумя типами систем: автоматического и неавтоматического (ручного) управление. Неавтоматическое управление реализуется человеком на основе данных от непосредственного восприятия органами чувств, а управление ведется на основе концептуальной модели, возникающей в сознании человека на основе наблюдения (например, работа токаря и т.п.). В автоматической системе управление осуществляется на основе заранее заложенной модели, а роль человека сводится к наблюдению.
Между этими, как бы противоположными по участию человека в процессе управления, системами располагаются автоматизированные системы управления, в которых участие человека в контуре управления обязательно. К этому классу систем относятся станционные системы железнодорожной автоматики и телемеханики.
Классификационным признаком для автоматизированных систем является степень автоматизации, под которой понимается объем функций управления, переданный аппаратно-программному комплексу системы. В наиболее простых системах автоматизируются функции сбора информации и предъявление их человеку-оператору в виде информационной модели (ИМ) на средствах отображения (СО). Например, такая структура управления соответствует работе дежурного по станции, оборудованной электрической централизацией с раздельным управлением стрелками.
Второй по степени автоматизации является АСУ, структурная схема которой представлена на рис.7.2,б. Роль человека в такой системе сводится к оперативному вмешательству при обнаружении рассогласования параметров от требуемых, при которых достигается наибольшая эффективность. Этот вид деятельности человека-оператора заключается в поддержании контролируемых им значений в заданных пределах. Примером может служить деятельность пилота при «слепом» полете по заданной траектории без использования автопилота.
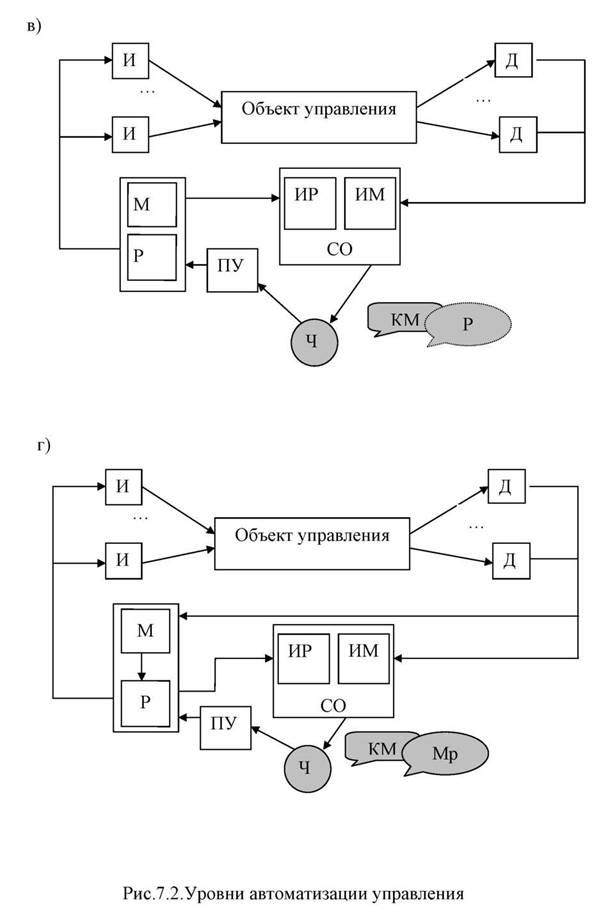
Следующую степень автоматизации представляют системысоветчики, рис.7.2, в. В этой системе человеку предъявляется на средствах отображения не только информационная модель ситуации, но и выбранное системой одно из решений (ИР). Сравнивая его со своим решением, выработанным на основе собственной концептуальной модели, оператор может согласиться с машинным вариантом или же реализовать свое решение, причем приоритет остается за человеком. Роль человека в этом случае сводится не только к оперативному, но в большей степени к тактическому управлению. Примером реализации этой структуры является АСУ диспетчерского управления с функцией построения прогнозного графика.
Четвертый уровень автоматизации (рис.7.2,г) предполагает участие человека в разрешении критической ситуации (Мр). На основе Мр система формирует альтернативные варианты решения и отображает их в виде возможных будущих ситуаций. Роль человека в такой системе заключается не только в оперативном или тактическом управлении, но, главным образом, в выработке стратегии управления в целом. Примером таких систем являются системы организационно-административного управления для руководителей высокого ранга иерархии управления, например главного диспетчера регионального центра управления перевозками.
Представленный структурный анализ АСУ позволяет нам определить достигнутый уровень системы управления станциями, который на сегодняшний день соответствует первому (низшему) из рассмотренных. Реализация функций автоматизации путем более широкого использования средств вычислительной техники именно на уровне взаимодействия с оператором открывает перспективу перехода к тактическому управлению на основе планирования работы станции, что соответствует третьему уровню автоматизации кибернетической системы.
7.2 Режимы управления и информационная структура управления работой станции
В системах электрической централизации дежурный по станции осуществляет дистанционное управление стрелками, сигналами и другими объектами. В связи с этим возникает необходимость формирования в АСУ адекватной информационной модели технологического процесса. Объем информации, включаемый в модель, и правила ее организации должны соответствовать задачам для реализуемого режима управления.
При компьютерном управлении устройствами электрической централизации, кроме традиционных видов (индивидуального управления объектами системы, маршрутного управления объектами ЭЦ с указанием начала и конца маршрута и простейших функций автоматического действия сигналов), в системе должно обеспечиваться
- накопление маршрутов и других заданий;
- автоматизированного предложения маршрутных заданий, реализуемых по согласию дежурного по станции;
- автоматическое управление.
В ЭЦ различают следующие режимы функционирования системы:
основной режим
Управление перевозочным процессом в основном режиме осуществляет дежурный по станции, при этом системой обеспечивается:
- централизованный контроль и централизованное управление объектами ЭЦ;
- централизованный контроль состояния соседних зон управления на крупных станциях (участковых, пассажирских, технических, сортировочных) с нужной степенью детализации информации;
- централизованный контроль и местное управление объектами;
вспомогательный режим
Этот режим реализуется в системе при возникновении отказов в устройствах СЦБ путем передачи "ответственных" команд, исполняемых без проверки условий безопасности и формируемых дежурным с соблюдением определенного регламента (запись в журналах, пользование пломбируемыми кнопками или со счетчиками числа нажатий и др.).
К таким командам относятся:
- вспомогательная смена направления движения на перегоне, оборудованном двухсторонней автоблокировкой;
- вспомогательный перевод стрелок при ложной занятости стрелочного участка;
- -искусственное размыкание замкнутых в маршруте путевых и стрелочных участков;
- пользование пригласительными сигналами;
- управление переездом, расположенным в пределах станции.
Пользование ответственными командами допускается после проверки на месте состояния стрелочного перевода, путевых стрелочных участков и станционных путей, с выполнением требований "Инструкции по движению поездов и маневровой работе".
аварийный режим
При повреждениях устройств СЦБ, не указанных в предыдущем пункте, на станциях осуществляется аварийный режим управления перевод стрелок курбелем, запирание их на висячий замок. В этом режиме передвижения могут выполняться под запрещающие сигналы светофоров по командам дежурного, передаваемым голосом по радиосвязи, или организуются с проводником. При этом может сохраняться централизованный контроль.
При использовании средств вычислительной техники изменяются подходы к отображению технологической информации. Средства отображения технологической информации играют важную роль в обеспечении эффективной деятельности оперативного персонала станции, т.к. до 80% информации он получает посредством зрения. Несмотря на многообразие и сложность функций, выполняемых современной автоматикой, роль дежурных остается достаточно сложной и ответственной, в особенности при вспомогательном и аварийном режимах.
Традиционно в России и за рубежом основными устройствами индикации поездного положения были панорамные табло желобкового или мозаичного типа на основе ламп накаливания или светодиодов. Традиционные табло обладают рядом недостатков:
- малая информативность;
- сложность при изменении статической информации (планы станций и участков, сигналы и т.п.);
- относительно большой объем проектных, монтажных и строительных работ;
- неприспособленность к отображению различной информации (состояние напольных устройств, видеоинформации, текстовых сообщений и т.п.);
- относительно большие габариты;
- необходимость прокладки соединительных кабелей большой емкости из релейной в аппаратное помещение оперативного персонала.
В настоящее время в связи с внедрением компьютерной техники все чаще используются многомониторные и видеопроекционные установки, а также панели с жидкокристаллическим дисплеем.
Эти устройства более универсальны, их монтаж можно осуществить в рабочем помещении за 1 2 часа, однако их использование, как правило, требует несколько больших начальных капиталовложений по сравнению с традиционным табло. На экранах можно отображать не только информацию о состоянии стрелок, рельсовых цепей и сигналов, но и различную текстовую, нормативно-справочную информацию, информацию от видеокамер и т.п. Для отображения используется богатая цветовая палитра, функции масштабирования и прокрутки (скроллинга). Кроме того, на одном и том же экране поочередно можно отображать справочную информацию из АСОУП и т.п. Учитывая прогресс в совершенствовании мониторов и видеопроекторов, а также их возможности в отображении графической, многоцветной информации, по показателям качества следует отдать им предпочтение по сравнению с традиционным табло.
Однако проблема обслуживания предъявляет дополнительные требования к вновь создаваемым системам, которые должны включать в состав программного обеспечения средства диагностики и проверки оборудования, а, с точки зрения пользования, должны иметь дружественный и максимально простой интерфейс, базирующийся на традиционной символике и индикации и обеспечивающий получение при необходимости соответствующих подсказок.
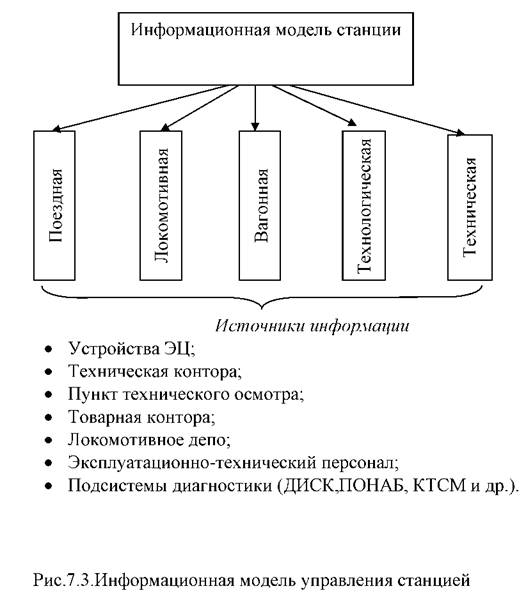
В практической деятельности пользователей (оперативного и обслуживающего персонала) информационная модель является источником информации, на основе которого формируется образ реальной поездной обстановки, производится анализ и формируются управляющие действия в системе. Полнота описания информационной модели определяют ее адекватность, а, следовательно, и эффективность системы управления. Действительно, чтобы принять решение об установке маршрута предварительно необходимо оценить ситуацию на станции по многим составляющим технологического процесса. Поскольку конечной целью перевозочного процесса является целенаправленное перемещение подвижных единиц (поездов, вагонов, локомотивов), то для организации любого перемещения исходными данными является точное знание места, назначения, состояния каждой единицы, технологического состояния систем и подразделений, технического состояния устройств.
Обобщенная структура информационной модели технологического процесса станции представлена на рис.7.3. Источниками информации для динамического функционирования моделей являются, прежде всего, технические средства автоматизации средства автоматической идентификации подвижных объектов, контроля состояния напольных устройств (стрелок, сигналов, рельсовых участков), устройства ПОНАБ, ДИСК, КТСМ и др., а также формируемые на основе данных о перемещениях сведения о расположении подвижных единиц на станции. Трудно формализуемые процессы сбора информации о технологическом положении на станции (динамика процессов погрузки/выгрузки на фронтах, исправность технических средств механизации и др.) компенсируются путем переговоров и запросов данных.
7.3. Техническая и функциональная структуры релейнопроцессорной централизации
7.3.1. Общие сведения
Для оперативного управления перевозочным процессом Петербургским Государственным Университетом Путей Сообщения разработана и внедрена на магистральном транспорте и в метрополитене система электрической централизации на базе микроЭВМ и программируемых контроллеров (ЭЦ-МПК).
Система ЭЦ-МПК обеспечивает реализацию функций автоматизации задания маршрутов, управления и контроля объектами на станции. ЭЦМПК является современной, открытой и наращиваемой системой, легко адаптируется к условиям конкретной станции при проектировании, а также при изменениях во время эксплуатации. ЭЦ-МПК интегрируется с исполнительными схемами традиционных релейных ЭЦ.
Благодаря реализации ряда функций средствами вычислительной техники достигается сокращение площадей служебно-технических помещений здания поста по сравнению с ЭЦ релейного типа. Поэтому система эффективна как при новом строительстве, так и при реконструкции устройств на станции с возможностью размещения аппаратуры в существующих зданиях постов ЭЦ. Кроме того, технические средства ЭЦ-МПК реализуют функции линейного пункта ДЦ без дополнительных затрат.
Использование современных стандартных средств вычислительной техники для ввода и отображения информации не требует изготовления специализированных средств контроля и органов управления (табло и манипуляторов). Информационный обмен между компонентами системы базируется на стандартных протоколах вычислительных систем и локальных сетей.
7.3.2 Функциональная структура
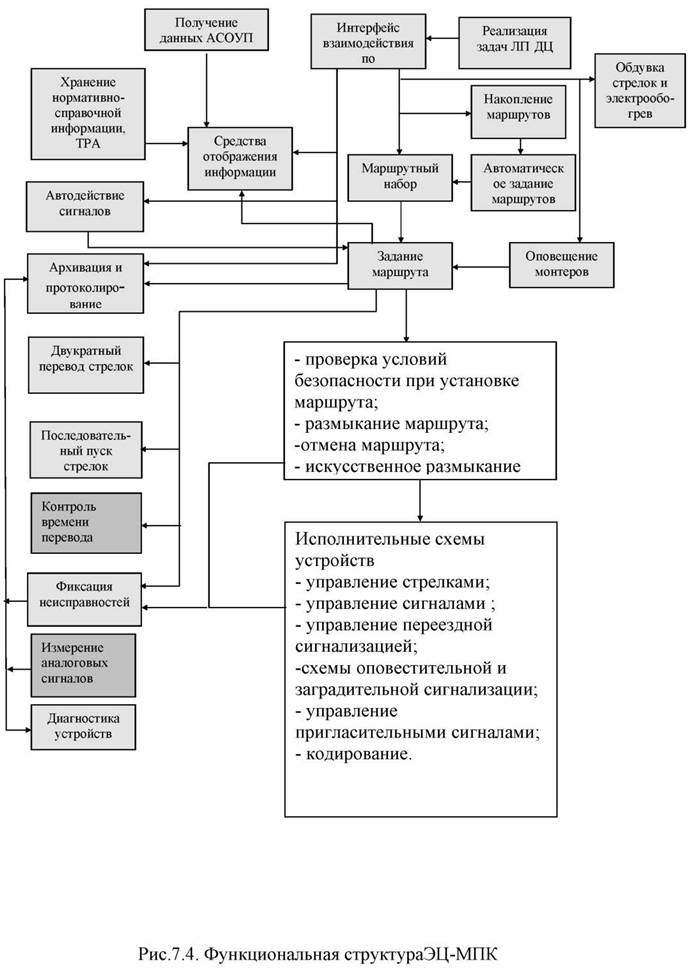
Реализация функций ЭЦ по автоматизации установки маршрутов и других, не связанных с обеспечением безопасности, выполняется средствами вычислительной техники. Такое техническое решение позволяет оптимизировать и упростить принципиальные электрические схемы, сократить количество используемых реле. В этом случае, с точки зрения традиционных функций ЭЦ, на средства вычислительной техники возлагается ряд задач:
1) выполнение функций маршрутного набора;
2) реализация режима автодействия светофоров;
3) двукратный перевод стрелки;
4) последовательный перевод стрелок;
5) фиксация неисправностей;
6) оповещение монтеров пути;
7) обдувка стрелок;
8) резервирование предохранителей.
Кроме того, обеспечивается выполнение и ряда новых функций, получаемых благодаря использованию программируемой элементной базы:
1. автоматическое протоколирование действий персонала, работы системы и устройств (функция «черного ящика»);
2. оперативное предоставление нормативно-справочной информации и данных технико-распорядительного акта (ТРА) станции;
3. реализация функций линейного пункта ДЦ для кодового управления станцией без дополнительных капитальных затрат;
4. автоматизация управления путем формирования маршрутных заданий на предстоящий период без ограничения емкости буфера;
5. накопление маршрутов, как по принципу очереди, так и по времени исполнения (без ограничения емкости буфера) для схем исполнительной группы, допускающих такую возможность;
6. хранение, просмотр и статистическая обработка отказов в ЭЦ;
7. поддержка оперативного персонала в нештатных ситуациях (исключение некорректных действий пользователя, режим подсказки);
8. реконфигурация зоны управления (возможность привлечения помощника при увеличении загрузки или наоборот использование нескольких человек в дневной период и одного ночью или передача на кодовое управление с близлежащей соседней станции в ночное время суток);
9. сопряжение с информационными системами вышестоящего уровня (АСОУП, АСУСС и др.).
В системе реализуются программное маршрутное и индивидуальное управление стрелками, кроме того, обеспечивается возможность автоматической установки маршрутов на предстоящий период (при согласии ДСП) с выдачей речевых сообщений в случаях недопустимых отклонений и нарушениях работы устройств. Функциональная структура релейнопроцессорной ЭЦ представлена на рис.7.4
7.3.3. Техническая структура системы и аппаратные средства ЭЦ-МПК.
ЭЦ-МПК строится по трехуровневой структуре (рис.7.5), где верхний уровень устройств представляют автоматизированные рабочие места дежурного по станции (АРМ ДСП) и электромеханика поста централизации (АРМ ШНЦ). Ко второму уровню относится комплекс технических средств управления и контроля (КТС УК). Третий уровень включает исполнительные схемы релейной централизации, при этом выполнение функций, обеспечивающих безопасность движения, возлагается на минимальное число реле I класса надежности.
АРМ ДСП реализован на резервированных РС компьютерах (комплекты «А» и «Б»), промышленного исполнения стандартной конфигурации с процессором типа Pentium.
Органами управления в системе являются манипуляторы типа «мышь» и клавиатуры. Выдача команд возможна только с одного комплекта активного, второй компьютер находится в горячем резерве и может быть использован только как средство визуализации для отображения общего плана станции или нормативно-справочной информации. Система может дополняться пультом резервного управления с упрощенной индикацией и пломбируемыми кнопками вспомогательных режимов. Для варианта, когда эта функция реализуется программно-аппаратными средствами ЭЦ-МПК, у дежурного устанавливается модуль, где монтируются групповая пломбируемая кнопка ответственных команд и ключи жезлы примыкающих перегонов.
В качестве средства
отображения используются 17-
Компьютеры АРМ ДСП объединены в локальную вычислительную сеть (ЛВС). В эту сеть включен АРМ ШНЦ, а также при необходимости могут быть включены другие пользователи информации о передвижении поездов. За счет использования локальной сети АРМы (в том числе ДСП) могут быть территориально рассредоточены на станции в наиболее предпочтительных с точки зрения контроля технологического процесса местах размещения оперативного и обслуживающего персонала.
Второй уровень системы - оборудование КТС УК также имеет 100% резерв и основывается на двух РС-совместимых промышленных контроллерах и периферийных платах сопряжения с электрическими схемами ЭЦ.
Внутри корпуса контроллера размещена несущая пассивная плата расширения BP-8S, которая имеет восемь равнозначных между собой слотов (разъемов) ISA и служит для обмена информацией между компонентами контроллера. Вертикально в плату расширения устанавливаются одноплатный компьютер и платы дискретного ввода-вывода ACL-7122, необходимое число которых определяется количеством объектов управления и контроля на станции (рис.7.6 ).
Основу одноплатного компьютера составляют центральный процессор марки AMD 486-DX/2 или аналогичный; энергонезависимое постоянное запоминающее устройство (ПЗУ) Flash емкостью 16 МВ; оперативное запоминающее устройство (ОЗУ) емкостью до 64МВ. Кроме того, на материнской плате компьютера располагается видеоадаптер, контроллер клавиатуры, система портов, обеспечивающих подключение внешних устройств (мыши, жесткого диска, накопителя на гибких дисках, сети Ethernet и др.). Это позволяет значительно упростить отладку системы и диагностирование в процессе эксплуатации.
Плата ACL-7122 является цифровым 144-х битным модулем ввода/вывода дискретных сигналов для компьютеров с ISA-шиной. На плате расположены шесть 50-ти контактных разъемов для подключения посредством полосового кабеля внешних устройств интерфейсных плат сопряжения.
Сбоку, на корпусе контроллера, находится винтовая клеммная панель, через которую на контроллер подается питание от источника. Рядом с клеммным терминалом находятся четыре светодиода, сигнализирующие о наличие питания 12В, -12В, +5В и -5В соответственно. Сверху компоненты контроллера закрыты металлической крышкой с перфорацией. Питание контроллеров осуществляется от импульсных источников.
Номенклатура периферийного оборудования включает:
- платы сопряжения для контроля состояния объектов устройство матричного ввода УМВ-56/8;
- модули вывода по управлению устройство управления УДО-48Р и УДО-24Я;
- релейные платы вывода TB-24R или DB-24R
- модули аналогового ввода RIO7017.
Устройство матричного ввода обеспечивает съем информации о состоянии 56 двухпозиционных объектов электрической централизации. Контакты контролируемых объектов подключаются к электронной схеме, в которой для обеспечения гальванической развязки по питанию между контроллерами КТС УК и поста ЭЦ используются оптроны (рис. 7.7,а). Оптронами называются оптоэлектронные приборы, в которых используются излучатели и фотоприемники, оптически и конструктивно связанные друг с другом (фотопары Дарлингтона). Принцип действия оптрона основывается на двойном преобразовании энергии. При включенном состоянии контакта контролируемого реле во входной цепи через излучатель в прямом направлении протекает ток и энергия электрического сигнала преобразуется в оптическое излучение. Внутри оптрона связь входа и выхода осуществляется с помощью оптического сигнала. Световой сигнал, попадая на фотоприемник, на базу транзистора приемной части оптрона, вызывает ионизацию в кремнии и образование зарядов в открытой базовой области, что вызывает протекание коллекторного тока теперь уже от источника питания контроллера через резистор R3 (так же, как от внешнего базового тока). Включение резистора R2 в цепь базы оптрона повышает быстродействие схемы и обеспечивает пороговый эффект, поскольку фототранзистор не переходит в состояние проводимости до тех пор, пока ток фотодиода не превысит величины, достаточной для получения разности потенциалов база-эмиттер на резисторе R2. При обработке сигнала контроллером низкому потенциалу на коллекторе транзистора оптрона соответствует логическая единица (реле включено). Использование оптронов в электрической схеме считывания состояния контролируемых объектов ЭЦ обеспечивает высокую электрическую изоляцию (гальваническую развязку питания контролируемых объектов от питания контроллера ) входа и выхода (более 1000В), однонаправленность потока информации отсутствие обратной связи с выхода на вход, невосприимчивость оптического канала к воздействию электромагнитных полей. Во входной цепи оптрона включен ограничивающий резистор R1 тока через излучатель. Универсальным излучателем для оптронов является инжекционный диод. Наиболее распространенными типами фотоприемников в современных оптронах являются фотодиоды, фототранзисторы и фототиристоры. Конструктивно пары излучатель-фотоприемник располагаются в одном корпусе.
Платы формирования управляющих воздействий TB-24R (DB-24R) (отличаются коммутационными характеристиками) взаимодействуют с одноплатным компьютером через плату ACL-7122 по параллельному интерфейсу 8255. Коммутационными элементами на этих платах являются 24 малогабаритных электромеханических реле, благодаря чему обеспечивается гальваническая развязка сигналов управления контроллера и выходных цепей. Для управления исполнительным объектом (например, реле ЭЦ) контроллер формирует команду в соответствующий порт вывода платы
ACL-7122 и через параллельный интерфейс осуществляется включение электронного ключа на плате управления (рис.7.7,б). Вследствие протекания тока через обмотку выходного реле последнее включается и, в зависимости от использования фронтового или тылового контакта, замыкает или размыкает цепь управления исполнительным реле ЭЦ.
В отличие от рассмотренных устройств сопряжения для управления в платах UDO-48Р и UDO-24R используется последовательный интерфейс RS-485 , а также микропроцессор.
Устройство управляющих выходов (окончаний) предназначено для подключения к контроллеру соответственно 48 и 24 внешних объектов управления и обеспечения гальванической развязки между источником питания КТС УК и источником питания объектов. В качестве релейных окончаний в модуле UDO-24R используются малогабаритные электромеханические реле (аналогичные как и на плате TB-24R). Отличие составляет то, что сигнал управления на обмотку реле формируется не от контроллера КТС УК, а от собственного микропроцессора платы, получающего команды от КТС УК по последовательному интерфейсу RS-485, чем достигается малопроводность монтажа (применяется двухпроводная линия). В платах UDO-48Р выходными элементами являются оптоэлектронные приборы твердотельные реле (рис.7.7,в). Поступившая команда от контроллера обрабатывается микропроцессором платы, а последний формирует управляющее слово на микросхему дешифратора. Вследствие этого через соответствующий излучающий диод оптопары протекает электрический ток, образующийся световой поток открывает силовой полупроводниковый ключ в выходной цепи (например, сильноточный семистор), где включено исполнительное реле.
При включении питания программа управления микропроцессором считывает 8-битный адрес платы UDO и переходит в режим ожидания команд от контроллера комплекта.
При обмене информацией с UDO-48Р используется блочный циклический код. Байт адреса, определяющий конкретную плату UDO, входит в состав кодируемой информации с кодовым расстоянием настройки d=3.
При получении команды, адресная часть которой совпадает с собственным адресом, микропроцессор проверяет правильность приема (отсутствие ошибок при приеме) и, если команда принята верно, переключает соответствующие объекты, после чего передает в линию сигнал квитирования о реализации команды. Если при приеме возникли ошибки, то принятая команда аннулируется, и микропроцессор опять переходит в режим ожидания команд.
Установленные на плате светодиоды индицируют состояние каждого выходного ключа: горящему светодиоду соответствует замкнутое состояние, а погасшему разомкнутое. Варисторы предназначены для защиты твердотельных реле от перенапряжений.
КТС УК состоит из двух параллельно и независимо функционирующих комплектов «основного » и «резервного», включенных в ЛВС. Один из них является активным, он осуществляет реализацию управляющего воздействия на объекты и передачу информации о состоянии контролируемых объектов по каналу связи АРМам. Другой комплект при этом является пассивными и находится в "горячем" резерве. Оба комплекта в процессе работы обмениваются информацией между собой по ЛВС. Схема переключения комплектов обеспечивает переход управления с одного комплекта на другой
• автоматически при нарушениях работы активного комплекта на основе диагностической информации, которой обмениваются комплекты по ЛВС;
• автоматически для обеспечения периодической проверки исправности пассивного комплекта;
• дистанционно из АРМ ДСП при систематических сбоях индикации или затруднениях в реализации команд управления;
• вручную электромехаником с помощью кнопок переключения комплектов на панели управления КТС УК для ремонта или профилактического обслуживания КТС УК.
При этом осуществляются переключения шин питания плат управления объектами, а также индикация активного и пассивного состояний комплектов на панели управления и мониторах АРМов. Благодаря информационному обмену между комплектами по ЛВС, а также непрерывному контроля устройств пассивным комплектом исключаются в процессе переключений нарушения в работе исполнительных схем (перекрытия сигналов, сброс искусственной разделки, нештатные переключения режимов «День/ночь» и др.).
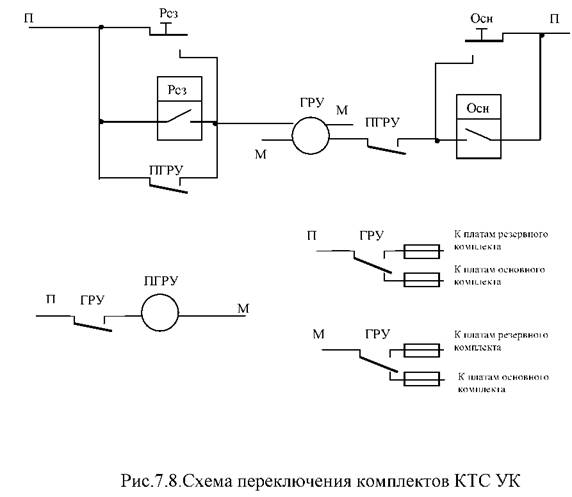
Схема переключения комплектов представлена на рис.7.8 и включает реле ГРУ и его повторитель ПГРУ. В схеме переключения комплектов обмотки реле ГРУ включены встречно-параллельно. Положение контактов реле и кнопок соответствуют активному состоянию основного комплекта КТС УК.
При необходимости передачи функций управления резервному комплекту, от АРМ ДСП передается соответствующая команда, адресованная резервному комплекту. Контроллер этого комплекта кратковременно включает твердотельное реле Р и создается цепь питания обмотки 1-3 реле ГРУ. Реле ГРУ, включившись, встает на самоблокировку через контакты 41-42 своего повторителя ПГРУ, а все полюса питания цепей управления переключаются на аппаратуру резервного комплекта.
Для того чтобы вернуть функции управления основному комплекту, по соответствующей команде с АРМ ДСП включается твердотельное реле О основного комплекта и замыкает цепь питания встречно включенной обмотки 4-2 реле ГРУ. Магнитные потоки обоих обмоток будут компенсировать друг друга и реле ГРУ выключится, выключив затем свой повторитель ПГРУ. Схема придет в исходное состояние.
Аналогично передача управления основному или резервному комплекту может осуществляться также нажатием соответствующих кнопок на панели управления.
7.4. Алгоритмы функционирования и программное обеспечения ЭЦ-МПК
7.4.1. Структура программного обеспечения
Программное обеспечение (ПО) ЭЦ-МПК состоит из ПО АРМов и ПО контроллера КТС УК.
ПО АРМ включает исполняемый модуль, и файлы баз данных для конкретной станции с описанием: объектов плана станции, таблиц занятия канала контролируемых объектов (ТЗК ТС), таблицы распределения команд объектов управления (ТЗК ТУ), алгоритмов формирования управляющих приказов. Формирование баз данных осуществляется модулем инициализации, обеспечивающим преобразование записей из текстового в двоичный вид, с выполнением тестирования на этапе адаптации ПО к условиям станции.
Основное назначение программы АРМ предоставление ДСП интерфейса для контроля и управления стрелками и сигналами на станции. Оперативная информация о состоянии объектов контроля отображается на экране монитора в виде плана (схемы) станции с индикацией состояния объектов стрелок, сигналов и другой информации. С учетом текущей поездной обстановки путем задания в системе меню соответствующего режима дежурным формируются команды оперативного управления движением поездов на станции. Выбор в верхней части экрана других окон позволяет предоставить пользователю диагностическую и нормативносправочную информацию из технико-распорядительного акта (ТРА) станции. Для оперативного контроля информационного обмена в системе на экран монитора могут выдаваться сведения о пакетах ЛВС, а также ТЗК канала ТС в виде матрицы импульсов или текстовой таблицы.
В процессе работы системы на обоих комплектах АРМ ДСП автоматически протоколируются двоичный файл поездной обстановки и текстовый протокол результатов диагностики и действий дежурного по станции. Эти данные недоступны для корректировки и сохраняются в течении одного месяца, при необходимости могут быть перенесены на дискеты. Данные мероприятия позволяют отказаться от традиционного использования пломбируемых кнопок для формирования ответственных команд во вспомогательном режиме. Каждый файл записывается в течение часа, после чего создается новый файл с новым именем по моменту создания.
ПО контроллера КТС УК состоит из исполняемого модуля и баз данных:
• объектов ТС (адрес расположения в ТЗК, адреса подключений к устройствам сопряжения (УСО), вид контролируемого сигнала);
• объектов ТУ (адрес расположения в ТЗК, адрес подключения к УСО, вид управляющего сигнала);
• маршрутов (тип маршрута поездной или маневровый, названия точек начала и конца маршрута, требуемое положение стрелок по трассе, включаемые реле исполнительной группы ЭЦ (Н, НМ, КМ, КС, С, ОТ), относящиеся к данному маршруту).
Основными функциями ПО контроллера КТС УК являются:
• получение информации о состоянии контролируемых объектов с УСО;
• обработка информации о контролируемых объектах и формирование сообщений для передачи по ЛВС в АРМ;
• поддержка интерфейса с ЛВС;
• прием и дешифрация команд управления от АРМ;
• формирование и реализация требуемых управляющих воздействий в соответствии с принятой командой;
• прием и реализация ответственных команд управления;
• получение измеряемых величин аналоговых сигналов;
• обработка информации об измерениях и формирование сообщений для передачи по ЛВС в АРМ.
• диагностика работоспособности парного комплекта КТС УК.
На обоих комплектах инсталлируется одинаковые исполняемые модули ПО, отличие составляют только поля адресов привязки к объектам в базе данных каждого контроллера.
При запуске ПО осуществляется инициализация баз данных из файла ПЗУ, принудительный сброс управления с плат ТУ, инициализация ЛВС, программирование работы таймера компьютера.
Известительная информация ТС от контроллера КТС УК на АРМ передается пакетами циклически, каждый пакет содержит имя канала ТС и все группы двухпозиционных объектов ТС (ТЗК ТС). Приказ ТУ передается спорадически от АРМа на контроллер КТС УК одним пакетом и содержит имя канала ТУ, номер станции в канале (для случая управления примыканиями или парками) и местоположение объекта в ТЗК ТУ, т.е. номер группы в канале ТУ, номер импульса в группе и номер признака.
7.4.2 Алгоритмическое обеспечение КТС УК
Контроль состояния объектов ТС
Опрос состояния контролируемых объектов осуществляется с плат УМВ. Конструктивно на плате входы ТС сгруппированы по 8, из которых один является диагностическим. Общее число групп равно 8. Таким образом, каждая плата УМВ обеспечивает подключения до 56 сигналов ТС. Для определения состояния группы объектов необходимо выдать на плату соответствующую маску, затем считать байт состояния 8 входов. Эта процедура выполняется по прерыванию от таймера с периодом 0.2 мс последовательно по всем восьми группам. Опрос всех объектов на плате осуществляется в течение 1.6 мс. Сигналы состояния контролируемых объектов физически представлены потенциалом. Логически объект считается активным в том случае, если на входе платы УМВ есть постоянное напряжение, пассивным, если напряжение отсутствует. Определение логического состояния объекта осуществляется за период времени 0.2 секунды методом накопления. Байты состояния объектов, считанные с периодом 0.2 мс, заносятся в буфер накопления по условию конъюнкции. Если в течение 0.2 секунд на соответствующем входе платы УМВ обнаружен высокий потенциал, объект ТС считается активным.
С целью минимизации увязки на вход платы УМВ может подаваться не только постоянный потенциал, но и импульсный сигнал. Для определения этого режима используется следующий алгоритм обработки: известно максимальное время нахождения объекта в активном и пассивном состоянии, если объект три раза изменил свое состояние и не находился в активном или пассивном состоянии больше максимального времени, то объект считается работающим в импульсном режиме. Для кодирования таких объектов в ТЗК ТС используется два бита информации включен/выключен и импульсный режим.
• В ТЗК также указываются и переменные, не имеющие физических входов (виртуальные объекты), представляющие собой сервисные данные для АРМ, например, диагностическая информация о комплектах, логическая блокировка стрелок и др. Состояния виртуальных объектов ТС изменяются на основе логики вычислений.
Обработка команд ТУ
При приеме команд ТУ коды дешифрируются, анализируются на корректность формата данных и записываются в буферы команд ТУ, один из которых организован по принципу "первый пришел - первый вышел" и второй одиночной ответственной команды ТУ. В основном цикле ПО осуществляется идентификация команд ТУ, выбор объектов управления и формируются управляющие воздействия (УВ) согласно типов команд.
Различают следующие типы команд ТУ:
• простые команды воздействия на одиночный объект;
• команды установки и отмены маршрутов;
• команды перевода стрелок;
• множественные команды, т. е. при поступлении одной команды ТУ осуществляется одновременное формирование управляющих воздействия несколькими объектами;
• команда на переключение комплектов (обрабатывается только пассивным комплектом);
• виртуальные команды, т.е. команды, не управляющие реле, а воздействующие только на состояние переменной (виртуального объекта) в ТЗК ТС.
При управлении стрелкой осуществляется контроль ее текущего положения, т.е. если пришла команда перевести стрелку в плюсовое положение и стрелка имеет плюсовой контроль, то УВ в схему стрелки не будет сформировано. УВ осуществляется только для перевода стрелки в крайнее положение, противоположное имеющемуся контролю, а также при его отсутствии для реверсирования стрелки.
Каждая стрелка может быть логически заблокирована для управления. В этом случае команды индивидуального или маршрутного управления не будет реализованы до тех пор, пока не будет снята блокировка. Блокировка и снятие блокировки стрелки реализуется простыми командами ТУ без подачи УВ в управляющую цепь стрелки.
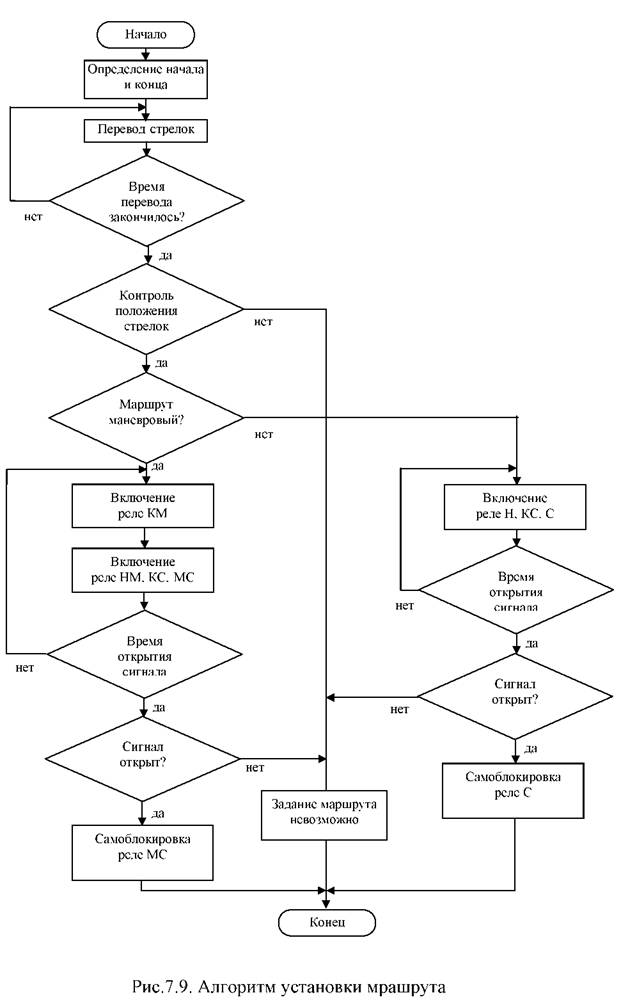
Для задания маршрута от АРМ ДСП в КТС УК должны прийти две команды, из которых первая начало, вторая конец маршрута. Эти команды связаны с идентификаторами светофоров, по которым задается маршрут. Согласно принятых команд идентифицируется задаваемый маршрут и его тип (поездной или маневровый). Идентификатор маршрута заносится в список маршрутов принятых к реализации. Последующие процедуры задания маршрута описываются алгоритмом, представленным на рис.7.9.
Перед началом реализации задания определяются стрелки маршрута, положение которых не соответствует требуемому, после чего выдаются команды на их перевод. По истечении времени, отведенного на перевод стрелок, выполняется проверка соответствия положения стрелок (программный аналог схемы соответствия). Если полученный контроль стрелок соответствует выданному управляющему воздействию (УВ) на их перевод, то реализация задания продолжается, иначе маршрут не задается, а его идентификатор удаляется из буфера.
Далее в зависимости от вида маршрута для маневровых выдается УВ на включение конечно-маневрового реле КМ в блоке конца маршрута, а затем в блоке начала маршрута последовательно на начальное реле (Н или НМ), в цепи контрольно-секционных реле (КС), и сигнального (С или МС). Для поездных маршрутов УВ формируется только в блоке начала маршрута на включение начального реле Н, контрольно-секционных КС и сигнального С.
Включение реле КС приводит к выключению маршрутных реле 1М и 2М, а затем реле З. С проверкой релейной схемой всех условий безопасности подается команда на включение сигнального реле.
При получении контроля фактического открытия светофора на разрешающее показание питание сигнального реле переходит на цепь самоблокировки, маршрут задан. Если время ожидания открытия сигнала превысит допустимое, то идентификатор маршрута удаляется.
При перекрытии сигнала во время движения поезда по маршруту после перекрытия сигнала происходит сброс цепи самоблокировки сигнального реле и удаление идентификатора маршрута из списка реализуемых.
При отмене маршрута от АРМ поступает две команды: первая идентификатор процедуры отмены, вторая код начала маршрута. Затем выполняется определение маршрута в списке принятых на реализацию, если таковой не найден, то поиск производится по буферу данных всех маршрутов. После этого такой маршрут заносится в список маршрутов принятых на реализацию. Далее осуществляется сброс УВ в цепи самоблокировки сигнального реле и контролируется перекрытие сигнала. При получении контроля перекрытия сигнала выдается УВ на включение реле ОТ блока соответствующего светофора и реле групповой отмены (ВОГ1), после чего идентификатор маршрута удаляется из списка маршрутов.
После того, как включится и перейдет на цепь самоблокировки реле ОТ, алгоритм последующей отмены реализуется исполнительной группой.
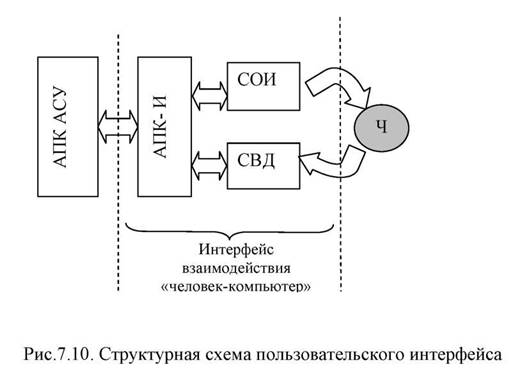
Выполнение всех функций в системе электрической централизации, возлагаемых на человека, возможно при обеспечении соответствующих условий наличие информации об управляемых объектах станции и возможность реализации управления в соответствии с выбранным типом модели. Сложные системы при проектировании рассматриваются как композиции подсистем, между которыми должны быть определены правила и средства взаимодействия. Граница, через которую осуществляется взаимодействие, называют интерфейсом. Границу взаимодействия в композиции технической части и оперативного персонала системы называют пользовательским интерфейсом (или интерфейсом «человек-компьютер»), который представляет собой совокупность аппаратно-программных средств и протоколов обмена.
Техническими средствами интерфейса взаимодействия являются (рис.7.10):
• программно-аппаратные средства увязки (АПК-И) с комплексом АСУ, включающие платы видеоадаптера, аппаратные стыки подключения органов управления, драйверы и т.п.;
• средства отображения информации (СОИ), которыми могут быть мониторы, видеопроекционные устройства, жидкокристаллические экраны, специализированные табло;
• средства ведения диалога (СВД) алфавитно-цифровая клавиатура, манипуляторы типа «мышь», дигитайзеры, специализированные пульты и т.п.
Наиболее удобным видом связи как между людьми, также и между техническими средствами и оперативным персоналом является двусторонний обмен диалог. Поэтому в основу закладывается формальный протокол этого взаимодействия, что по аналогии соответствует понятию «язык общения», но в виде конвенциональной знаковой системы. На этапе разработки АСУ она создается в виде соглашений, в которых знаки и сигналы (символы, графические изображения, речевые сообщения) обеспечивают диалоговый режим.
Аппарат управления при компьютерном управлении ЭЦ базируется на технических средствах АРМ, где органами управления являются манипулятор типа «мышь» и/или клавиатура (стандартная или специализированная). Система может дополняться пультом резервного управления с упрощенной индикацией и пломбируемыми кнопками вспомогательных режимов. Для варианта, когда эта функция реализуется програмноаппаратными средствами, у дежурного устанавливается модуль, где монтируются групповая пломбируемая кнопка (или со счетчиком числа нажатий) для ответственных команд, стрелочный коммутатор установки стрелок на макет, а также ключи-жезлы примыкающих перегонов.
В качестве средства отображения используются 17-21 мониторы в зависимости от размеров станции. На крупных станциях могут использоваться видеопроекционные табло на просвет или отражения также управляемые с компьютера.
Многообразие данных для индикации и ограниченные возможности экранов для размещения их условных изображений, определяют особенности проектирования аппарата управления и отображения в компьютерных системах. Основными принципами, которыми руководствуются при этом, являются:
• Использование многооконного интерфейса;
• Формирование вложенной системы меню;
• Разработка отдельных подменю для редких команд управления;
• Вызов дополнительной информации через горячие клавиши (номера и подсветка положения стрелок, наименования рельсовых цепей, длина путей в условных вагонах и т.п.).
• Индикация вспомогательной и диагностической информации только в случаях нарушений;
• Совмещение, как правило, объекта управления и объекта контроля с привязкой к топологии станции.
Каждое окно формируется выделением на экране монитора трех основных функциональных зон, представленных на рис. 7.11.
Базовая зона содержит главное меню окон, индикацию режима управления, текущие дату и время, кнопку отключения звуковой сигнализации. Базовая зона является неизменной для всех спроектированных в системе окон.
В основной зоне отображается информация, для визуализации которой предназначено окно.
Диалоговая зона представляет собой меню задач и обеспечивает взаимодействие пользователя по выбору подрежимов и функций текущего окна (вызов дополнительных меню, масштабирование, переключение режимов управления, отказ от незавершенных действий и т.п.).
Для систем оперативного управления на железнодорожном транспорте эта задача решена по заданию Министерства путей сообщения учеными и специалистами кафедры «Автоматика и телемеханика на ж.д.» ПГУ ПС в конце 90-х годов. На основе обобщения мирового и отечественного опыта создания компьютерных систем управления были разработаны нормативные документы отрасли: стандарт ОСТ 32.111-98 «Системы железнодорожной автоматики и телемеханики. Условные графические изображения и индикация» и руководящий технический материал РТМ 32ЦШ III5842.04-97 «Рекомендации по учету влияния человеческого фактора на безопасность при разработке и проектировании систем железнодорожной автоматики и телемеханики». В указанных документах определены основные требования для инженерно-психологического проектирования пользовательского интерфейса систем диспетчерского управления, диспетчерского контроля и компьютерных (микропроцессорных и релейнопроцессорных) электрических централизаций.
Глава 7. КОМПЬЮТЕРНОЕ УПРАВЛЕНИЕ ЭЛЕКТРИЧЕСКОЙ ЦЕНТРАЛИЗАЦИЕЙ...................................................................................................................... 1
7.1 Кибернетическая модель управления и автоматизация технологических процессов станции .................................................................................. 1
7.2 Режимы управления и информационная структура управления работой станции 3
7.3.1. Общие сведения.................................................................. 6
7.3.2 Функциональная структура................................................. 7
7.3.3. Техническая структура системы и аппаратные средства
ЭЦ-МПК............................................................................................... 8
7.4. Алгоритмы функционирования и программное обеспечения ЭЦ-МПК 13
7.4.1. Структура программного обеспечения 13
7.4.2 Алгоритмическое обеспечение КТС УК 14
7.5 Особенности организации пользовательского интерфейса.
Условные графические изображения и индикация.................................. 17