



|
|
|
|
#1 (ссылка) |
|
Crow indian







Регистрация: 21.02.2009
Возраст: 41
Сообщений: 30,456
Поблагодарил: 398 раз(а)
Поблагодарили 6048 раз(а)
Фотоальбомы:
2624 фото
Записей в дневнике: 905
Репутация: 126141
|
Тема: Рихтовочные и выправочные устройства на машине ВПО-3000Рихтовочные и выправочные устройства на машине ВПО-3000 Общие сведения Машина ВПО-3000 (выправочно-подбивочно-отделочная, производительность 3000 м/ ч) является высокопроизводительной машиной, выполняющей выправку пути в плане, продольном профиле и по уровню, а также по подбивке пути и отделке балластной призмы. На машинах, выпускаемых серийно, управление всеми операциями, кроме выправки пути по уровню, осуществляется механиками машины вручную. Управление машиной вручную (особенно рихтовкой) не обеспечивает необходимого качества выправленного пути и требует высокой квалификации обслуживающего персонала. Поэтому машины оснащаются автоматическими устройствами: трех- и четырехточечными рихтовочными устройствами и трехкоординатным выправочным устройством. Все они работают по способу сглаживания, т.е. уменьшают неровности, имеющиеся в пути, сглаживают их. Принцип их действия основан на замере смещений пути (стрел) в месте выправки относительно измерительной базы — трос-хорды, которая закрепляется и натягивается на специальных тележках под машиной. Трехточечное рихтовочное устройство размещается под машиной и турным вагоном (вагоном для отдыха бригады машины), расположенным впереди машины. У него самая длинная из существующих устройств измерительная хорда. В прямых участках длинная хорда позволяет выправлять заводины (неровности) пути длиной до 60 м и обеспечивает плавность выправленного пути. Однако в кривых участках длинная хорда задевает за металлоконструкции машины и вагона (не вписывается в кривую). Поэтому в кривых участках концы трос-хорды переставляются к наружному рельсу, что усложняет работу. В зависимости от того, много ли крутых кривых имеется на обслуживаемом машиной участке, встречаются трехточечные устройства с хордой длиной 36, 48 и 52 м. Для работы в кривых у любого трехточечного рихтовочного устройства необходимо смещение рихтующей точки в сторону кривой, чтобы обеспечить совмещение трех точек с кривой. В данном устройстве применен автомат вписывания в кривые, состоящий из дополнительной тележки и электронного блока. Однако при работе в переходных кривых необходимо вмешательство оператора в работу автомата, корректировка его работы, так как при полностью автоматической работе это устройство смещает начало и конец переходной кривой, а также искажает саму кривую, причем чем длиннее хорда, тем больше это искажение. Поэтому качество рихтовки пути в переходных кривых зависит от квалификации оператора Четырехточечное рихтовочное устройство размещается под машиной и турным вагоном, прицепленным сзади машины. Оно лучше вписывается в кривые, так как является более гибким, чем трехточечное. Однако начало и конец переходной кривой при работе в автоматическом режиме им также смещаются, а сама переходная кривая искажается, хотя в значительно меньшей степени, чем трехточечным устройством. Поэтому в переходных кривых также требуется вмешательство оператора в работу автомата. Кроме того, качество выправки прямых участков этим устройством несколько ниже, чем трехточечным. Длина измерительной базы четырехточечного рихтовочного устройства около 25 м. Эти устройства являются самыми простыми по конструкции и электрической схеме. Поэтому их эксплуатация наиболее удобна. Трехкоординатное выправочное устройство располагается в пределах базы машины. Оно осуществляет выправку пути в автоматическом режиме одновременно в трех координатах: в плане (рихтовку), продольном профиле и по уровню. Схема трехкоординатного устройства трехточечная. Для работы в кривых это устройство оснащено автоматом вписывания н переходные кривые. Автомат вписывания представляет собой электронный блок, управляемый импульсами от датчика в зависимости от пройденного пути, размещенного в колесе измерительной тележки. При работе оператору достаточно включить автомат вписывания в начале переходной кривой и выключить в конце. Автомат устанавливает путь в переходной кривой близко к теоретическому значению. Это устройство является наиболее прогрессивным из перечисленных устройств на машине ВПО-3000. Все три рихтовочных устройства унифицированы между собой. В них одинаковы элементы измерительных тележек, пневмооборудования, механизмов натяжения трос-хорды. Концевая тележка четырехточечного рихтовочного устройства (рис. 69) предназначена для удержания конца трос-хорды. Концевая тележка трехточечного рихтовочного устройства аналогична по конструкции. Ее отличие заключается в том, что обойма с трос-хордой закреплена по центру тележки не постоянно, а может переставляться от центра на 250 мм в ту и другую сторону.  Тележка 1 подвешена к ферме машины при помощи двух пневмоцилиндров 4 и штанг 5. Пневмоцилиндры 4 предназначены для подъема тележки в транспортное положение, где она крепится стяжками 3 и крюками. Штанги 5 закреплены на ферме машины на скалке 7, которая может перемещаться поперек оси машины пневмоцилиндром 6 от упора 8 до упора 9. Такая конструкция позволяет осуществить боковой прижим тележек к одному из рельсов за счет натяжения трос-хорды. При работе рихтовочных устройств все тележки должны быть прижаты к одному рельсу, принятому за базовый: в прямых — чаще всего правый рельс, в кривых — наружный рельс кривой. Прижатие к одному рельсу необходимо для того, чтобы исключить влияние изменения ширины колеи на положение измерительной базы. Ширина колеи может меняться в пределах допуска от 1516 до 1546 мм. Если прижимать тележки к разным рельсам, трос-хорда будет иметь возможность перемещаться в пределах этого допуска, т.е. на 30 мм, что совершенно недопустимо. В середине тележки шарнирно закреплена обойма с блоком 2, который огибает трос-хорда. Нижняя ветвь троса закреплена шарнирно на другой концевой тележке, а верхняя идет к натяжному механизму. Натяжной механизм (рис. 70) одинаков для всех трех рихтовочных устройств. Отличие заключается лишь в его размещении на машине. Он состоит из тормозного вагонного цилиндра 2, закрепленного на ферме машины. На штоке цилиндра шарнирно закреплен рычаг 3, одним своим концом связанный с тягой которая также закреплена на ферме машины, а вторым — через регулировочную стяжку 4 — с трос-хордой. Конец троса заделывается на коуш 5. При выдвижении штока цилиндра 2 рычаг 3 поворачивается относительно верхней оси и натягивает трос-хорду с усилием от 10 до 20 кН. Чем длиннее хорда, тем большее усилие натяжения необходимо. 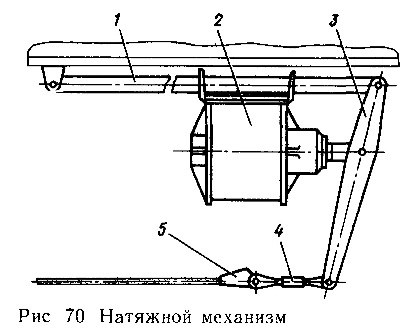 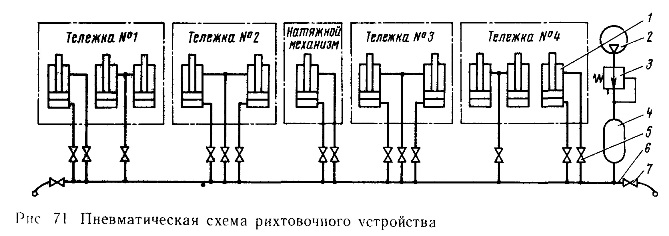 Пневмооборудование трех- и четырехточечного рихтовочных устройств (рис. 71) состоит из компрессора 2, который через регулятор давления 3 и ресивер 4 подает воздух в пневмомагистраль. Пневмоцилиндры 1 размещены на ферме в местах крепления тележек и служат для подъема их в транспортное положение, прижима к одному из рельсов и натяжения трос-хорды. Управление пневмоцилинд-рами осуществляется кранами 5, размещенными около каждой тележки и натяжного механизма на ферме машины с правой стороны. Пневмомагистраль проходит через всю машину и турный вагон и заканчивается концевыми кранами 7 и шлангами 6. В случае выхода из строя компрессора пневмооборудование можно питать от компрессора локомотива через шланг 6. При этом запрещается брать воздух из тормозной магистрали. Пневмооборудование трехкоординатного выправочного устройства состоит из тех же элементов, но оно включает в себя на одну измерительную тележку меньше. Измерительная тележка трех- и четырехточечного устройств (рис. 72) состоит из коробчатой рамы 2 с колесами, которая крепится к ферме машины при помощи штанг 3 и кронштейнов 1. Подъем тележки в транспортное положение и прижим ее к одному из рельсов осуществляются двумя пневмоцилиндрами 5 и 7, расположенными наклонно. Для подъема тележки воздух подается в што-ковую (нижнюю) полость обоих цилиндров. Для прижима ее к одному из рельсов воздух подается в поршневую (верхнюю) полость одного из цилиндров. Например, для прижима к левому рельсу воздух подается в верхнюю полость правого цилиндра 7. Для крепления тележки в транспортном положении предусмотрены крюки 4. Цилиндры 5 и 7 крепятся к ферме машины на кронштейнах 6. 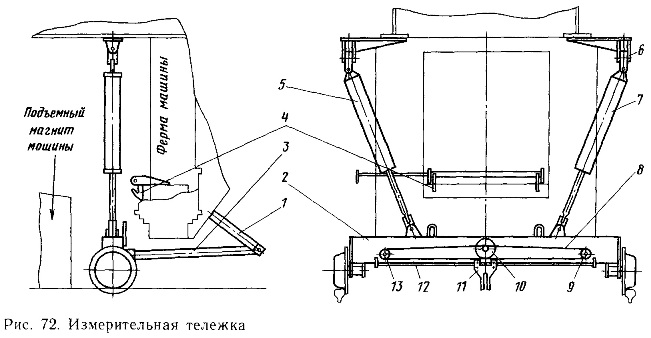 На раме тележки размещена штанга 12, по которой перемещается измерительная вилка 11. На вилке закреплен тросик 8, который огибая блоки 9 и 13, охватывает двумя витками барабан, закрепленный на валу сельсин-датчика 10. Вилка 11 своей прорезью охватывает трос-хорду. При перемещении рельсо-шпальной решетки, а вместе с ней и измерительной тележки относительно трос-хорды в поперечном направлении вилка перемещается по штанге 12 и через тросик 8 поворачивает вал сельсин-датчика 10, который дает сигнал в схему управления сдвигом пути (рихтовкой). Механизм сдвига машин ВПО-3000, оснащенных рихтовочными устройствами, как правило, оборудуется гидравлическим приводом. Гидравлическая схема механизма сдвига (рис. 73) состоит из двух самостоятельных систем: системы сужения рихтовочных роликов и собственно рихтовочной системы. Первая состоит из насоса НШ-10 2, гидрораспределителя 6, цилиндра 8, снабженного гидрозамком 7. Система оснащена предохранительным клапаном 3 и манометром 5, включенным в магистраль через демпфер 4. На сливной магистрали установлен фильтр 1. Управление сужением роликов осуществляется в автоматическом режиме при сужении или расширении колеи при помощи конечных выключателей, взаимодействующих с рычагами рихтовочных роликов. Предусмотрено и ручное управление. Механизм расширения-сужения рихтовочных роликов необходим для того, чтобы зазор между рихтовочными роликами и рельсами был всегда в пределах 2—5 мм независимо от ширины колеи. В этом случае уменьшается свободный ход механизма сдвига при перемене направления рихтовки. А так как механизм сдвига машин, оснащенных рихтовочным устройством, работает в релейном режиме, т. е. рихтовка постоянно осуществляется в разных направлениях, уменьшение зазора между рихтовочным роликом и рельсом повышает точность, скорость отработки и снижает динамическое воздействие машины на путь.  Рихтовочная система состоит из насоса 18 типа НШ-46, подающего через обратный клапан 17 масло на распределитель 12 и через гидрозамок 11 на два рихтовочных цилиндра 9 и 10. Цилиндры связаны рихтовочной балкой, поэтому работают синхронно. Управление распределителями 12 осуществляется автоматически рихтовочным устройством или в ручном режиме. Система оснащена также предохранительным клапаном 15, фильтром 19, манометром 13 с демпфером 14. Для обеспечения возможности разрядки машины в случае выхода из строя гидронасоса 18 в системе предусмотрен ручной насос 16. Обе системы объединены общим баком 20. Все три рихтовочных устройства работают по способу сглаживания. При помощи этих устройств можно ставить путь и на проектные отметки. Для этого необходимо предварительно замерить реальное положение пути и, зная положение, в котором он должен находиться, выполнить расчет сдвижек через каждые 5 м, а затем в процессе работы плавно задавать вручную расчетные сдвижки. При этом сглаживание пути будет осуществляться автоматически. 22. Четырехточечное рихтовочное устройство Устройство и принцип действия. Рихтовочное устройство (рис. 74) состоит из тележек 1, 3 и 4, размещенных под машиной, и тележки 5, размещенной под турным вагоном. Между тележками 1 и 5 натянут трос 2. На измерительных тележках 3 и 4 закреплены сельсин-датчики 7 и 10, связанные через вилки с трос-хордой 2. На пульте управления находятся сельсин-приемники 6 и 12, связанные электрически с сельсин-датчиками 7 и 10. Сельсин 6 при помощи трособлочной передачи перемещает каретку 9 с контактом 11, а сельсин 12 — каретку 13 с контактами 8. Принцип действия рихтовочного устройства основан на непрерывном сравнении стрел H и h. Стрела Н находится на выправленном пути, a h — в зоне рихтовки. Если стрелы Huh равны, контакт 11 размещается между контактами 8, и сигнала на рихтовку нет. Как только стрелы h и Н становятся не равными, контакт 11 перемещается, замыкается с контактом 8 и подает сигнал на рихтовку. Включается механизм сдвига машины, рельсо-шпальная решетка вместе с измерительной тележкой перемещается в противоположную сторону до тех пор, пока стрелы Huh уравняются, а контакт И окажется между контактами 8. В силу инерционности системы контакт 11 проскакивает нулевое положение, замыкается с противоположным контактом 8 и подает сигнал на рихтовку в противоположном направлении. В процессе работы контакт 11 постоянно перемещается около нулевого положения, но рельсо-шпальная решетка укладывается близко к нулевой линии из-за своей большой жесткости. Ее фиксация осуществляется с достаточно большой точностью по нулевой линии. В прямых участках пути стрела Н равна нулю. Рихтовочное устройство стремится и стрелу h приравнять нулю. В кривых стрела Н несколько больше h за счет геометрических размеров хорды. Это неравенство компенсируется передаточным отношением между линейными перемещениями каретки 13 и вилки на измерительной тележке 4, которое равно 0,905. В переходных кривых стрелы H и h не должны быть равны между собой. Поэтому переходные кривые рихтовоч-ным устройством искажаются. Чтобы уменьшить это искажение, расстояние между тележками 3 и 4 выбрано небольшим (3,2 м). Кроме того, можно вводить корректировку в работу рихтовочного устройства на переходных кривых смещением контакта 11 вдоль каретки 9. На корпусе пульта управления (рис. 75) закреплены сельсин-приемники 2, связанные электрически с сельсин-датчиками на измерительных тележках. На валах сельсинов установлены барабаны 1, которые охватываются нитями 9. Нити огибают блоки 8 и закреплены на каретках 11 и 13, имеющих контакты. Каретки перемещаются по струнным направляющим 10. На каретке 13 находится контакт 12, взаимодействующий с контактами каретки 11, и рамка 16. Рамка 16 связана с кареткой винтом 15 и может перемещаться линейно относительно каретки при вращении гайки 14. Нить 9, перемещающая каретку 13, закреплена на рамке 16. Таким образом, при неподвижном барабане / сельсина 2 каретку 13 можно смещать относительно стола пульта вращением гайки 14 вручную. Ее смещение необходимо для введения корректировки в работу автомата в переходных кривых, а также при начале работы, чтобы не сделать резкой неровности в месте зарядки.  На переднюю панель пульта выведены органы управления рихтовочным устройством: выключатели питания сельсинов и напряжения 24 В 6, контрольный вольтметр 5, предохранители 7 и сигнальные лампы 4. Лампы сигнализируют об обрыве измерительной нити, связывающей измерительные, вилки на тележках с сельсин-датчиками, об отрыве рельсо-шпальной решетки от магнитов, о включении питания сельсинов. Лампы «влево» — «вправо» включаются при замыкании контактов кареток 11 и 12 н показывают, в каком направлении идет процесс сдвижки пути. Тумблер 3 блокирует сигнализацию обрыва нити и сброса магнитов. Это необходимо при зарядке машины перед работой. В эксплуатации встречаются пульты, оснащенные лентопротяжным механизмом. В этом случае в пульте имеется еще один сельсин-приемник, протягивающий через редуктор бумажную ленту по столу (верхней панели) пульта. Этот сельсин электрически связан с сельсин-датчиком, размещенным в мерном катке, периметр окружности которого равен 1 м. Мерный каток устанавливается на машине и перемещается по рельсу во время рихтовки. Лента на столе пульта перемещается пропорционально пройденному машиной пути в масштабе 1:500. В качестве ленты может быть применена бумажная лента с вагона-путеизмерителя. Каретки 11 и 13 в этом случае оснащаются пишущими элементами (стержнями от шариковых авторучек), а на графике изображается кривая перемещения кареток, что соответствует стрелам H и h, замеренным измерительными тележками в каждом сечении пути. Запись графиков стрел дает более наглядное представление о работе рихтовочного устройства и перемещениях пути. Кроме того, при наличии лентопротяжного механизма можно осуществлять постановку пути в проектное положение. Для этого по рихтуемому участку пути делают предварительный заезд и записывают график натурных стрел кареткой 11. На основании информации о требуемом положении пути выполняют расчет программных сдвижек, строят график этих сдвижек и в процессе рихтовки обводят полученный график кареткой 11. 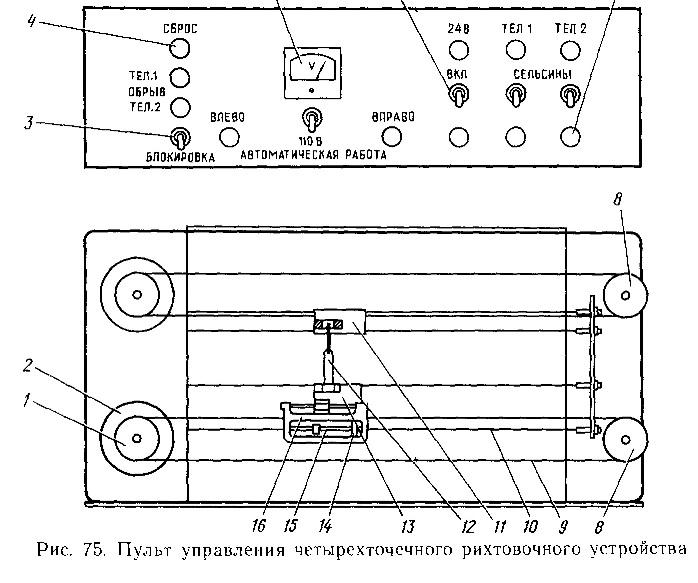 Пульт управления рихтовочным устройством может быть размещен как в будке управления машиной, так и в турном вагоне. Электрическая схема устройства (рис. 76) включает в себя три цепи: питания сельсинов, собственно рихтовки и сигнализации. Питание сельсинов осуществляется переменным током напряжением 110 В от бортовой сети машины при включении тумблера S2. Напряжение контролируется вольтметром V. Тумблером S3 через предохранитель F2 включается пара сельсинов В2—В4, а тумблером S4 через предохранитель F3 — пара сельсинов В1—ВЗ. Сельсины В1 и В2 находятся на пульте, ВЗ и В4 — на второй и третьей измерительных тележках. Включение пар сельсинов контролируется неоновыми лампами Н7 и Н8. Цепь рихтовки для простоты сначала рассматривается при замкнутом тумблере S5 («блокировка»). Ее питание осуществляется от аккумуляторных батарей машины постоянным током напряжением 24 В. При включении тумблера S1 «плюс» батареи через предохранитель F1 и замкнутый тумблер S5 подается на контакт каретки и на лампу НЗ, «минус» —-на лампы НЗ—Н6. Лампа НЗ загорается, сигнализируя о готовности цепи к работе. При работе устройства, когда стрелы Н и h не равны между собой, контакт каретки замыкается либо с верхним, либо с нижним контактом другой каретки. При замыкании верхнего контакта «плюс» подается через тумблер S5 и нормально замкнутый контакт реле К1 на обмотку реле К2. Реле К2 срабатывает, его нормально разомкнутый контакт замыкается и подает «плюс» на исполнительное реле или гидрозолотник механизма сдвига. Одновременно загорается лампа Н2. При замыкании нижнего контакта срабатывает реле К2, загорается лампа HI, «плюс» подается на другое реле или золотник механизма сдвига, и путь сдвигается в другую сторону. Нормально замкнутые контакты реле К1 и К2 разрывают цепь срабатывания соседнего реле, предотвращая возможность их одновременного включения. 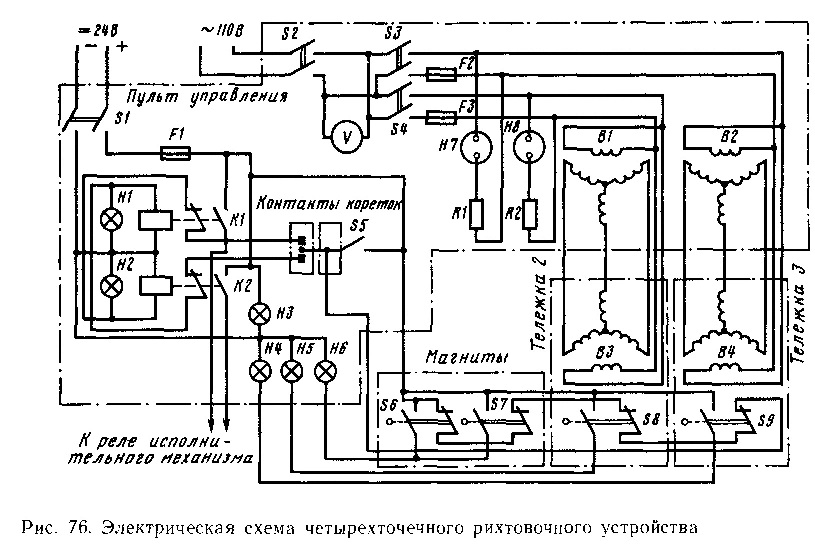 При разомкнутом тумблере S5 «плюс» на контакт каретки подается через замкнутые контакты конечных выключателей S6—S9: S7 и S6 находятся на магнитах машины и сигнализируют об отрыве от них рельсо-шпальной решетки; S8 и S9 находятся на измерительных тележках и сигнализируют об обрыве измерительной нити. Их нормально разомкнутые контакты при этом замыкаются и включают лампы Н4, Н5 или Н6. Конечные выключатели S6—S9 и лампы Н4—Н6 образуют цепь сигнализации. Регулировка и настройка. Настройка должна осуществляться на прямом участке пути, у которого разность смежных стрел (стрел, замеренных от 20-метровой хорды через 10 м) равна 0±1 мм. При настройке тележки рихтовочные устройства опускают на путь, прижимают их к одному рельсу и натягивают трос-хорду. В кривых при увеличении стрел изгиба пути обе каретки должны смещаться в сторону кривой, т.е. в левой кривой — влево, в правой — вправо. Для проверки этого включают питание сельсинов, не включая питания 24 В рихтовки, смещают измерительные вилки на измерительных тележках влево по ходу движения машины на 20—30 мм. Каретки на пульте должны также сместиться влево. Если обе каретки или одна из них смещаются вправо, меняют местами проводники на клеммах Р1 и Р2 соответствующего сельсин-приемника на пульте или сельсин-датчика. Таким же образом проверяют правильность протяжки бумажной ленты на пульте. При вращении мерного катка в сторону движения машины вперед лента должна перемещаться в сторону лицевой панели пульта, т.е. на оператора. После этого измерительные вилки на тележках вставляют в трос-хорду. На пульте ослабляют винты крепления кареток к тяговым нитям, устанавливают каретки точно посередине пульта так, чтобы контакт 12 находился между контактами каретки И (см. рис. 75), и закрепляют каретки. Это нулевое положение должно быть отмечено на линейке пульта. Для того чтобы в дальнейшем можно было производить настройку нуля без нулевого пути, места положения измерительных вилок на тележках при их нулевом положении также отмечают устойчивыми метками (например, рисками на направляющей, по которой перемещается вилка). При последующих настройках достаточно установить вилки в отмеченные места и проверить, находятся ли каретки на пульте в нулевом положении. Такая проверка необходима каждый раз перед началом работы. Если каретки сбились с нулевого положения, ослабляют винты их крепления к тяговым нитям и сдвигают каретки в нулевое положение. На практике для настройки нуля рихтовочного устройства может не оказаться нулевого пути. В этом случае на приблизительно прямом отрезке пути выполняют все предварительные операции, описанные выше, но не отмечают на пульте нулевого положения кареток. На пути мелом отмечают место положения осей всех четырех тележек и убирают машину с вагоном с этого места. Вдоль внутренней головки рельса, к которому были прижаты тележки, натягивают шнурок или леску, прижав концы в точках, на которых находились первая и четвертая тележки, на расстоянии 20—30 мм от внутренней грани рельса. Для этой цели изготовляют два бруска одинаковой толщины (20—30 мм). В точках нахождения второй и третьей тележек замеряют стрелы и машину возвращают на прежнее место. Если эти стрелы окажутся равными нулю, то и каретки на пульте стоят в нулевом положении, если же они отличны от нуля, то каретки на пульте необходимо сместить на величину полученных стрел в нулевое положение. Пример. Тележки были прижаты к правому рельсу. При замере стрел правого рельса оказалось, что стрела h = +6 мм, стрела Н — +4 мм. Знак «плюс» указывает, что стрелы больше нуля. Машина устанавливается на прежнее место так, чтобы оси тележек оказались точно напротив сделанных меток. Каретка 11 (см рис. 75) должна быть смещена вправо на 6 мм и закреплена в этом положении, каретка 13 — на 4 • 0,905 = 3,6 мм, так как передаточное отношение между перемещением вилки и перемещением каретки равно 0,905. Это и будет их нулевым положением. После этого можно фиксировать нулевое положение кареток на пульте. Вилки измерительных тележек освобождают от трос-хорды и смещают также на величину замеренных стрел, после чего отмечают их нулевое положение. Если при замере стрелы окажутся отрицательными, то каретки смещают в противоположном направлении. Существует еще один способ настройки. После замера стрел и установки тележек в исходное положение между ребордой второй тележки и правым рельсом устанавливают прокладку толщиной 6 мм, а между ребордой третьей тележки и правым рельсом устанавливают прокладку толщиной 4 мм. Тогда измерительные тележки окажутся в нулевом положении, и каретки также можно устанавливать в нулевое положение. Если при этом способе стрелы Я и А окажутся меньше нуля, тележки прижимают к другому рельсу и соответствующие прокладки устанавливают между ребордами измерительных тележек и левым рельсом. Для контроля настройки машину устанавливают на другом участке, запоминают положение кареток и тележек на пути, замеряют стрелы H и h. Перемещение каретки 11 должно точно соответствовать стреле h, а перемещение каретки 13 — стреле Н, умноженной на 0,905. Работа с устройством. Тележки рихтовочного устройства устанавливают в путь и прижимают к одному из рельсов (в прямых — к правому, в кривых — к наружному рельсу, в S-образных кривых — к любому рельсу). В процессе работы нельзя переключать прижим тележек с одного рельса на другой, что приводит к появлению местной неровности пути. Натягивают трос-хорду, проверяют, заправлены ли в него измерительные вилки, и включают питание сельсинов. Вращая винт 15, устанавливают контакт 12 в среднее положение между контактами каретки 11, смещая рамку 16 относительно каретки 13 (см. рис. 75). Затем включают питание рихтовки и после начала движения плавно выводят рамку 16 в среднее положение каретки 13 по шкале, имеющейся на рамке. Дальнейшая работа устройства осуществляется автоматически. В процессе работы необходимо следить за равномерностью отработки команд рихтовки и за аварийной сигнализацией обрыва измерительной нити и сброса магнитов. В случае возникновения любой неисправности необходимо немедленно остановить машину. Корректировка переходных кривых осуществляется следующим образом. При въезде передней тележки наточку начала переходной кривой необходимо смещать рамку 16 относительно каретки 13 так, чтобы измерительная тележка № 2 (за магнитом) двигалась по прямой до тех пор, пока она сама не поравняется с началом переходной кривой, а далее плавно возвращать рамку в первоначальное положение. На выходе из переходной кривой необходимо проделать ту же операцию, но в обратном порядке, т.е. смещать рамку 16, чтобы тележка № 2 продолжала описывать переходную кривую до тех пор, пока она не поравняется с точкой конца переходной кривой. После окончания работы необходимо выключить питание на пульте и надежно закрепить тележки рихтовочного устройства в транспортном положении. 23. Трехточечное рихтовочное устройство Принцип действия. Рихтовочное устройство (рис. 77) состоит из концевых тележек 1 и 6, между которыми натянут трос-хорда 4, и измерительных тележек 2 н 5. Тележка 2 размещена вагоном или между вагоном и машиной, тележка 5 — в зоне выправки. С целью уравнивания перемещений кареток в случае неравенства расстояний от концевых до измерительных тележек на тележке 2 ставится большой блок на сельсин-датчике. На машине закреплен мерный каток 3, представляющий собой колесо со смонтированным в нем сельсин-датчиком, который делает один оборот за 1 м пройденного пути. На измерительных тележках 2 и 5 закреплены сельсин-датчики 7 и 22, связанные механически при помощи измерительных вилок с трос-хордой, а электрически — с сельсин-приемниками 17 и 20, которые размещены на пульте управления. Сельсин 20, вращаясь, перемещает задающую каретку 21, а сельсин 17 — следящую каретку 14 с управляющими контактами 15. На пульте имеется также программная каретка 18, несущая управляющий контакт 16 и потенциометр, связанный при помощи водила 19 с задающей кареткой. Все каретки снабжены пишущими элементами (стержнями от авторучек), записывающими перемещения кареток на ленте 13. Лента протягивается через редуктор сельсином 12, который электрически связан с датчиком пути 3. 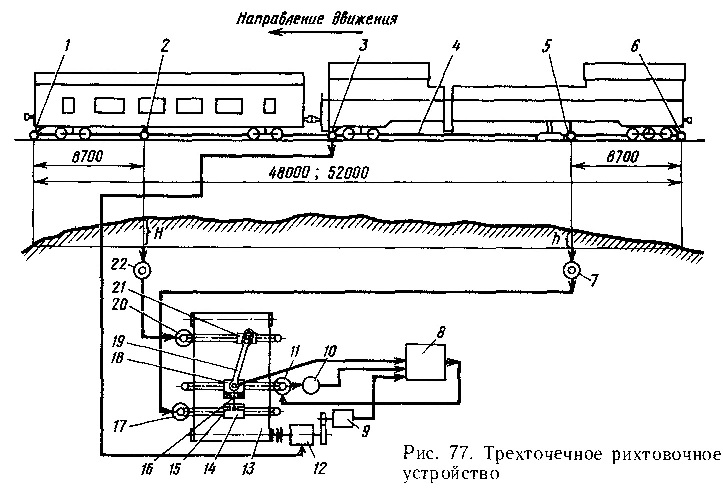 На прямых рихтовочное устройство работает по обычной трехточечной схеме: программная каретка закрепляется на нулевой отметке; следящая каретка, повторяя перемещения тележки 5 на неровностях пути относительно трос-хорды, смещается и замыкает управляющие контакты 15 и 16. Контакты, замыкаясь, включают механизм сдвига машины, который стремится установить путь на прямую линию. При этом коэффициент сглаживания определяется отношением длины хорды к расстоянию от задней тележки 6 до измерительной тележки 5, т. е. зависит от геометрических параметров хорды. Автомат вписывания в переходные кривые включает в себя усилитель 8, на вход которого подается сигнал от датчика скорости — тахогенератора 9, вращаемого сельсином 12 привода ленты. На вход усилителя 8 подается также сигнал от потенциометра, размещенного на программной каретке. Под действием этих двух сигналов на прямых участках пути на выходе усилителя сигнал равен нулю. При входе в кривую задающая каретка 21 начинает смещаться сельсином 20 и при помощи кулисы 19 поворачивает потенциометр, размещенный на программной каретке 18. На выходе усилителя 8 появляется сигнал, управляющий двигателем 11, который смещает программную каретку в сторону задающей каретки, а с ней и управляющий контакт 16. Механизм сдвига также смещается в сторону кривой. С двигателем 11 связан тахогенератор обратной связи 10, который, подавая сигнал также на вход усилителя 8, не позволяет программной каретке 5 отрабатывать мелкие перемещения задающей каретки 21, т. е. является сглаживающим элементом. Поэтому программная каретка перемещается по средней линии перемещения задающей каретки и плавно описывает переходную кривую. Кроме того, тахогенератор 10 способствует устойчивой работе автомата. В круговых кривых работа осуществляется так же, как и в прямой. При этом программная каретка смещена на величину стрелы круговой кривой. Устойчивой работы в -переходных кривых не обеспечивает даже хорошо отлаженный и настроенный автомат, поэтому требуется постоянное вмешательство оператора в его работу. Принципиальная электрическая схема. Она состоит (рис. 78) из схем: питания сельсинов, рихтовки, сигнализации, автомата вписывания. Сельсины питаются переменным напряжением 110 В от бортовой сети машины. Пара сельсинов В1 и В4 включается тумблером S7, пара В2 и В5 — тумблером S6, пара ВЗ и В6 — тумблером S5. Цепи защищены предохранителями F2—F4, контроль их включения осуществляется неоновыми лампами HI—НЗ. Сельсин-приемники В1— ВЗ размещены на пульте и перемещают: В1 — ленту самописца, В2 — задающую каретку, ВЗ — следящую каретку. Сельсин-датчик В4 размещен в мерном катке, В5 — на тележке № 2, В6 — на тележке № 3. Схемы рихтовки и сигнализации аналогичны описанным в п. 22. Первая включает в себя контакты кареток, реле К1 и К2, сигнальные лампы отработки сдвигов Н4 и Н5, предохранитель F7 и тумблер включения питания S12; вторая — конечные выключатели S14— S17 и сигнальные лампы Н7—Н9, которые вынесены на правый пульт машины для более оперативного вмешательства в работу автомата механиком машины. Туда же вынесен тумблер S13 включения автоматического управления. Схема автомата вписывания в переходные кривые состоит из усилителя Л, на вход которого подается сигнал с тахогенератора G1, являющегося датчиком скорости, и потенциометра R2, размещенного на программной каретке. Их сигналы балансируются под-строечным резистором R1. На вход усилителя подается также сигнал с тахогенератора обратной связи G2 через балансировочный резистор R3. Питание тахогенераторов осуществляется от цепи питания сельсинов через выключатель S10, предохранитель F5, выпрямитель V2 и фильтр, образованный конденсаторами СЗ, С2, С6 и резистором R7. Выход усилителя А связан с управляющей обмоткой двигателя Ml перемещения программной каретки. Конденсатор С4 предназначен для сдвига фазы, а конденсатор С1 — для снижения напряжения на обмотке двигателя Ml. Для возможности принудительного сдвига программной каретки в ту или другую сторону, что необходимо при корректировке работы автомата и для его настройки, предусмотрен тумблер S8. Он подает с усилителя на выход моста, образованного резистором R2 и тахогенератором G1, напряжение 6,3 В, выпрямленное диодом VI, которое далее попадает на вход усилителя А. На его выходе появляется сигнал, включающий двигатель Ml, который смещает программную каретку до тех пор, пока нажат тумблер S8. Кнопка S9 «баланс» предназначена для установки программной каретки в нулевое положение, что достигается подачей в противоположные плечи моста постоянного напряжения 6,3 В. В этом случае на входе и выходе усилителя А должен быть нулевой сигнал. Питание усилителя осуществляется переменным током напряжением 220 В от бортовой сети машины через выключатель 5 и предохранитель F1. Тумблеры включения напряжения питания 110 и 220 В (S2—S4) расположены на распределительном щите. Наличие напряжения контролируется вольтметром V, который тумблером S3 подключается к сети 220 или 110 В. Автомат вписывания может работать только при движении машины, так как на вход усилителя подается напряжение с датчика скорости — тахогенератора G1. Для обеспечения проверки работы автомата и его настройки на стоянке в схеме предусмотрен двигатель М2, который через редуктор и муфту включения связан с лентопротяжным механизмом самописца. Управление двигателем М2 осуществляется тумблером S11 через предохранитель F6 и фазосдвигающий конденсатор С5 от сети питания сельсинов. Двигатель М2 перемещает ленту самописца, имитируя движение машины. Пульт управления. Он представляет собой (рис. 79) блок, в котором в одном корпусе размещены самописец, элементы электронного оборудования, управляющая,коммутирующая и сигнальная аппаратуры.  Бумажная лента на самописце, размещенная на подающем барабане 14, огибает валик 18, проходит по столу самописца и тянется ведущим барабаном 9, к которому прижимается валиком 8. Ведущий барабан 9 приводится во вращение сельсином 11 или двигателем 12. С сельсином связан тахогенератор — датчик скорости 10. Над столом самописца на направляющих 15 перемещаются задающая 20, следящая 16 и программная 29 каретки. Каждая каретка несет пишущий элемент 19. В качестве пишущего элемента могут быть применены стержни от авторучек, фломастеры, карандаши. Перемещение задающей и следящей кареток осуществляется сельсинами 13 и 22 при помощи нитей 21, а программной — двигателем 25 через нить 27. С двигателем 25 связан тахогенератор обратной связи 24. Следящая каретка несет управляющие контакты 17, а программная — контакт 31 и потенциометр 30, движок которого через водило 28 связан с задающей кареткой 20. На корпусе самописца размещены усилитель 23 и плата 26 с элементами электрической схемы. На переднюю панель пульта выведены тумблеры и выключатели управления 4, сигнальные лампы 3, ручка резистора подстройки обратной связи 5, контрольный вольтметр 1. На боковой панели пульта расположены предохранители 6, соединительные разъемы 2 и ручка резистора «подстройка моста» 7. Регулировка и настройка. Настройка осуществляется на прямом участке пути. Тележки и мерный каток опускают на путь, прижимают их к одной рельсовай нити и натягивают трос-хорду. За нулевое положение задающей и следящей кареток принимается такое положение, когда их пишущие стержни находятся на одной линии посередине ленты самописца. Трос-хорду ослабляют, переставляют его в крайнее правое положение на концевых тележках и проверяют, остались ли следящая и задающая каретки на одной линии. На пульте отмечают нулевое положение кареток при смещенной хорде. Затем переставляют торс-хорду в крайнее левое положение и отмечают нулевое положение кареток. Таким образом, в трехточечном рихтовочном устройстве на пульте должно быть три нулевых положения кареток и на тележках — три нулевых положения вилок. 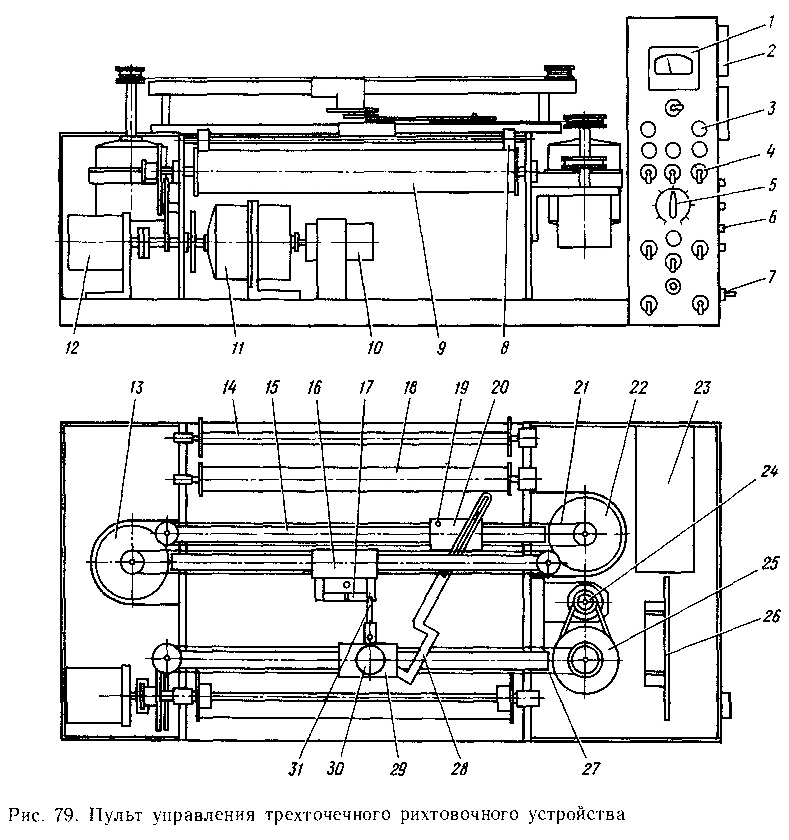 Перемещение этих кареток должно быть в 1,25 раза меньше перемещения вилок на тележках и направлено в ту же сторону. Например, при перемещении вилки на тележке № 3 вправо на 20 мм следящая каретка должна сместиться также вправо на 16 мм. При размещении измерительной тележки № 2 между вагоном и машиной перемещение задающей каретки должно быть в 1,6 раза меньше перемещения вилки. Это объяcняется тем, что на валу сельсина этой тележки установлен барабан большего диаметра, чем на тележке № 3. Настройка программной каретки осуществляется при среднем нулеврм положении следящей и задающей кареток. Включают усилитель, дают ему прогреться в течение 30—60 с и включают питание тахогенератора и двигателя М2 протяжки ленты. При этом программная каретка займет какое-то произвольное положение. Если она находится недалеко от нулевого, то настройкой резисторов R1 «настройка моста» и R3 «обратная связь» ее выводят в нулевое положение. Если программная каретка находится далее 10 мм от нулевого положения, устанавливают ручки резисторов R1 и R3 в среднее положение, отворачивают винты крепления потенциометра 30 на программной каретке и, поворачивая его корпус в ту или другую сторону, устанавливают программную каретку в нулевое положение, после чего потенциометр 30 надежно закрепляют. Нулевым положением программной каретки считается такое, когда контакт 31 находится между контактами 17 следящей каретки, а пишущий стержень — на одной линии с пишущими стержнями следящей и задающей кареток. После этого включают тумблер S9 «баланс», а программная каретка должна остаться в нулевом положении. Если она смещается с нулевого положения, подстройкой резистора R1 «настройка моста» ее возвращают в нулевое положение. После возвращения тумблера S9 в исходное положение каретка сместится с нуля. Подстройкой резистора R3 «обратная связь» ее возвращают в нулевое положение. Для проверки правильности настройки программной каретки выключают питание сельсинов тележки № 2 и вручную смещают задающую каретку на произвольную величину. Программная каретка должна следовать за задающей кареткой. Линия, которую пишет стержень программной каретки на расстоянии 12 мм от стержня задающей каретки по длине ленты, должна точно копировать линию задающей каретки. Это проверяется при помощи шаблона, закрепленного на программной каретке, передняя часть которого отстоит от стержня задающей каретки на расстоянии 12 мм. Окончательная проверка настройки рихтовочного устройства производится в процессе движения машины. Перед началом движения делают отметку на рельсе против одной из тележек. Затем включают питание сельсинов, усилителя, тахогенераторов, но не включают питание управляющего сигнала рихтовки. Машину перемещают на 200— 300 м, записывая графики перемещения всех трех кареток. После этого машину возвращают в исходное положение (к отметке на рельсе), ленту перематывают на подающий барабан (в исходное положение, к началу записи кареток на ленте) и повторяют движение по тому же участку. Графики, вычерченные за оба прохода машины, должны совпадать на всем протяжении с допустимым отклонением ±2 мм. Принцип работы. Тележки устанавливают на путь и прижимают их к одному из рельсов. Если предполагается работа в кривой радиусом менее 800 м, трос-хорду на концевых тележках смещают от центра в направлении, противоположном направлению кривой: в правых кривых — влево, в левых кривых — вправо. Концы трос-хорды должны размещаться на передней и задней тележках в одинаковых гнездах на одном расстоянии от оси пути, чтобы трос-хорда был всегда параллелен оси пути. Рихтовка S-образных кривых возможна трехточечным рихтовочным устройством только тогда, когда их радиус более чем 800 м. В этом случае трос-хорда располагается по оси пути. Если радиус любой из S-образных кривых меньше чем 800 м, то их рихтовка осуществляется только при помощи ручного управления. Нельзя переставлять хорду сначала в одну сторону, а затем в другую; в месте перестановки обязательно появится неровность. Включают тумблер «Авт. работа», 110 и 220 В, питание сельсинов, тахогенераторов. Питание 24 В рихтовки на пульте пока не включают. Тумблером «Двигатель» включают протяжку ленты и следят за перемещением программной каретки, управляющий контакт которой должен находиться между контактами 17 следящей каретки. Если этого не происходит, подстройкой ручки 5 «Обратная связь» устанавливают программную каретку в указанное положение. После выключения на пульте тумблера «Двигатель» и включения «24В» начинается движение. На первых 10—20 м пройденного пути плавно возвращают ручку 5 «Обратная связь» в исходное положение. Дальнейшая работа осуществляется автоматически. Необходимо лишь следить за аварийной сигнализацией и перемещениями кареток. При нормальной работе кареток: задающая 20— пишет волнистую линию, следуя за неровностями невыправленного пути; следящая 16— постоянное перемещение влево-вправо около контакта 17, пишет волнистую линию с малыми шагом и амплитудой. Выправка пути осуществляется по средней линии. Программная каретка 16 следует по средней линии перемещения задающей каретки 20. Любое другое перемещение кареток свидетельствует о неисправности системы. В этом случае следует остановить машину и выяснить причину неисправности. В переходных кривых в работу автомата вводится корректировка ручкой 5 «Обратная связь». При входе в переходную кривую вилка на тележке № 2, а с ней и задающая каретка 20 начнут смещаться в сторону кривой. Схема автомата выполнена таким образом, что и программная каретка 16 начнет смещаться в ту же сторону, но с некоторым запаздыванием. При правильной же работе программная каретка должна начать смещение только тогда, когда тележка № 3 (за магнитами) поравняется с началом переходной кривой. Поэтому поворотом ручки 5 удерживают программную каретку на нулевой линии до тех пор, пока тележка № 3 не поравняется с началом переходной кривой, а затем поворотом ручки 5 в другую сторону плавно смещают программную каретку в сторону смещения задающей каретки 20. График перемещения программной каретки должен получиться прямой наклонной линией, конец которой находится на средней линии перемещения задающей каретки в точке, где тележка № 3 поравняется с концом переходной кривой. На круговой кривой программная каретка пишет прямую линию, параллельную нулевой. На выходе из кривой ручкой 5 также управляют программной кареткой, смещая ее по наклонной линии в другую сторону к нулевой линии. Таким образом, график перемещения программной каретки в кривой должен получиться трапецией, углы которой размещены в точках, на которых тележка № 3 находилась в начале и конце переходной кривой. При выходе из строя автомата вписывания в переходные кривые возможно ручное управление рихтовочным устройством. Для этого выключают питание усилителя и тахогенераторов. На прямых участках пути программную каретку закрепляют на нулевой линии, а на кривых программной кареткой выписывают трапецию так, как это было описано выше, но каретку смещают вручную. Сглаживание пути осуществляется во всех случаях за счет геометрических размеров рихтовочного устройства. При зарядке в кривой возможен случай, когда вилка на измерительной тележке будет смещена, например, вправо, а следящая или задающая каретки будут находиться посередине пульта или даже смещены влево. При включении сельсинной пары каретка не займет положения вилки, а останется в прежнем положении или сместится незначительно. Это происходит потому, что за весь диапазон перемещения кареток (400 мм) сельсин делает несколько оборотов. Сущность работы пары сельсин-датчик— сельсин-приемник заключается в том, что приемник повторяет угол поворота датчика, но не считает числа оборотов. Например, если отключить питание сельсинной пары и развернуть датчик или приемник на 360°, а затем включить питание, положение ротора приемника не изменится. Поэтому при очередном отключении и включении питания сельсинной пары всегда имеется возможность пропустить целое число оборотов датчика. Для того чтобы этого не происходило, при зарядке в кривых после установки измерительных вилок на хорду замечают, в каком положении находится вилка относительно середины ее направляющей. Затем на пульте при выключенном питании сельсинов устанавливают вручную соответствующую каретку примерно в такое же положение и включают питание сельсинов. В этом случае каретка займет положение, точно соответствующее положению вилки. После окончания работы выключают все питание рихтовочного устройства, ослабляют трос-хорду, поднимают тележки устройства и надежно закрепляют их в транспортном положении. 24. Система автоматической выправки пути по уровню Она является составной частью трехкоординатной системы выправки пути на машине ВПО-3000 (рис. 80). В систему входят: маятниковый датчик с механизмом изменения угла его наклона VII, пульт управления II и датчик пути, вмонтированный в мерное колесо измерительной тележки 4. В систему входит также устройство оперативного контроля положения пути по уровню в зоне выправки и за машиной, включающее маятниковый датчик VIII, маятниковый датчик с измерительной тележкой V и вольтметр с цифровой индикацией I, а также регистратор (самописец IV) положения по уровню выправленного пути. Точность выправки пути этой системой составляет ±2 мм. Для измерения положения пути по уровню используется бесконтактный дифференциальный трансформаторный маятниковый датчик (рис. 81). В нижней части корпуса 1 неподвижно закреплен Ш-образ-ный сердечник (статор) 6, набранный из пластин электротехнической стали с радиально обработанными полюсными наконечниками. На полюсных наконечниках расположены три катушки 7, 8 и 9: катушка 8 является обмоткой возбуждения, а катушки 7 и 9 — выходными. Над Ш-образным сердечником на оси 2 подвешен полый ротор 3, в нижней части которого закреплен якорь, выполненный из одинакового со статором материала. Якорь 5 в нижней своей части также радиально обработан. Между якорем и статором имеется равномерный зазор. Внутрь датчика заливается тщательно отфильтрованное трансформаторное масло. Оно обеспечивает устойчивость ротора к высокочастотным вибрационным и ударным возмущениям, возникающим при работе выправочно-подбивочно-отделочных машин, но позволяет датчику реагировать на низкочастотный полезный сигнал. Корпус датчика герметично закрыт крышкой 4. В первый вариант системы автоматической выправки положения пути по уровню, кроме бесконтактного маятникового датчика, входит механизм изменения угла наклона его корпуса, управляемый от датчика пути. Датчик пути (рис. 82) состоит из корпуса 2 и оси 1, выполненных из немагнитного материала. В корпусе жестко закреплены два геркона 3 и 4, каждый из которых представляет собой магнитоуправляемый контакт. На оси / датчика закреплен магнит 5. Датчик пути монтируется в мерном колесе, длина окружности которого равна 1 м. При вращении мерного колеса, а значит, и оси датчика пути срабатывают поочередно герконы, выдавая через каждые 0,5 м пройденного пути импульсы, которые поступают на пульт управления. 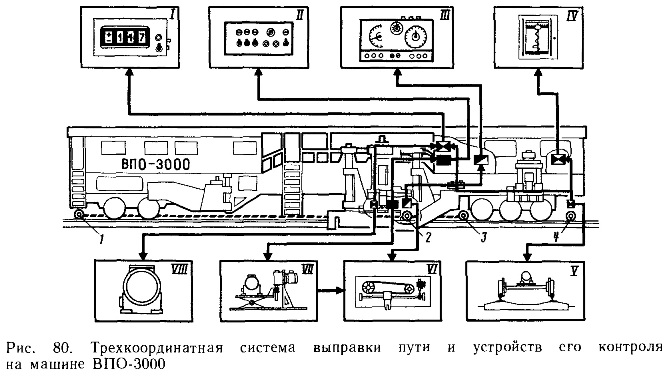 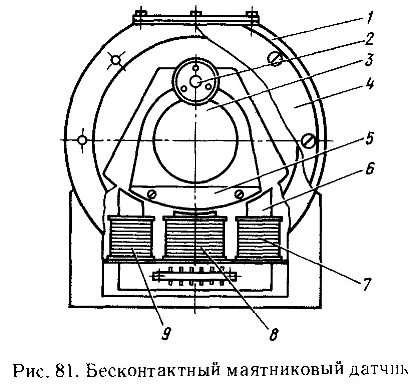 Пульт управления (рис. 83) устанавливают на одном из основных пультов машины в будке управления. На его лицевой панели смонтированы органы управления системы автоматической выправки пути по уровню, а также элементы контроля и индикации: 1 — предохранитель сетевого напряжения; 3 — контрольная лампа сетевого напряжения; 2 — тумблер для включения и отключения пульта; 4 — шкала для контроля задаваемого отвода возвышения; 5 — переключатель возвышения нитей пути; 6—переключатель градиентов отвода возвышения; 7,8,9 — индикаторные лампы для индикации положения переключателя 6; 10 — кнопка импульсного ручного управления набором возвышения; 11 — кнопка непрерывного ручного управления набором возвышения. В пульте управления смонтированы: блок питания, электронная схема управления и сельсин-приемник, ось которого связана со шкалой, выведенной на лицевую панель. Электрическая схема системы автоматической выправки положения пути по уровню приведена на рис. 84. 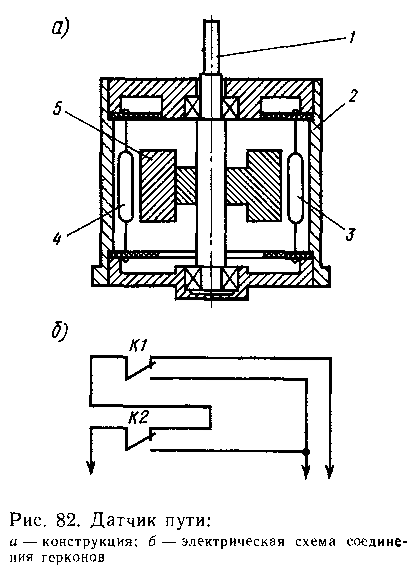 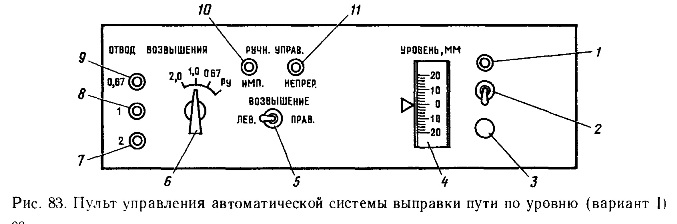 Трансформатор T1 питается напряжением U= 110 В от стабилизатора машины ВПО-3000 и имеет два выхода, на которых включены диодные мосты V4' и V5, выпрямляющие напряжение, поступающее с трансформатора. На выходе диодного моста V4 образуется напряжение 15 В положительной полярности относительно общего провода, а на выходе диодного моста V5 — напряжение той же величины, но другой полярности. Для фильтрации напряжения на выходе диодных мостов включены емкости С4 и С5. Напряжение с выхода диодных мостов подается на вход стабилизатора. Стабилизатор напряжения положительной полярности собран на элементах R5, V6 — V8. Соответственно стабилизатор напряжения отрицательной полярности собран на элементах R6, V9 — VII. Напряжение на выходе стабилизаторов должно быть 5 В. Для фильтрации стабилизированного напряжения используются емкости С6 и С7. Стабилизированным напряжением положительной полярности питаются счетчики Dl—D4, генератор D7, усилитель А1 и микросхемы D5 и D6, расположенные на плате управления. Нестабилизированным напряжением положительной полярности питается транзистор VI на выходе счетчика платы управления, смонтированный совместно с реле К1. Нестабилизированным напряжением отрицательной полярности питаются индикаторные лампочки 1,7— 9 (см. рис. 83). Стабилизированным напряжением отрицательной полярности питается усилитель А1 (см. рис. 84), смонтированный на плате управления. На плате управления расположен генератор D7, создающий на своем выходе переменное напряжение U = 3-5 В, частотой f=2 кГц для питания обмотки возбуждения бесконтактного маятникового датчика В1. Генератор собран на одной микросхеме D7 и двух емкостях (на схеме не показаны), создающих переменное напряжение требуемой частоты. Выходные обмотки маятникового датчика подключены к диодным мостам VII и V12. На выходе этих мостов формируется напряжение, пропорциональное углу наклона маятникового датчика. Для усиления сигнала, получаемого с этого датчика, до величины, обеспечивающей срабатывание реле К2, используется усилитель А1, собранный на интегральной микросхеме К140УД8Б. Балансировка нуля усилителя осуществляется переменным резистором R8. Резистором R9, включенным в обратную связь усилителя, регулируется зона нечувствительности системы автоматической выправки пути по уровню. Выход усилителя нагружен на обмотку поляризованного реле К2, которое своими контактами управляет срабатыванием промежуточных реле, имеющихся в схеме машины ВПО-3000 и включающих питание на электромагнитные муфты механизма подъема.  При работе на прямом участке пути маятниковый датчик устанавливают в нулевое положение по шкале 4 (см. рис. 83) и включают механизм подъема электромагнитов. Далее выправка пути по уровню осуществляется автоматически. 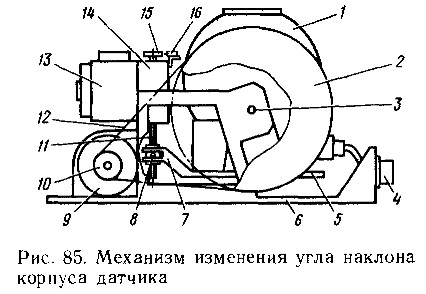 Для работы в переходных кривых и при настройке системы в круговых кривых используется механизм изменения угла наклона маятникового датчика (рис. 85). Этот механизм в процессе движения машины наклоняет корпус датчика 1 под действием импульсов от датчика пути. Импульсы через 0,5 м поступают на вход счетчика (см. рис 84), собранного на трех микросхемах D2 — D4. Каждая микросхема представляет собой триггер-логический элемент с двумя устойчивыми состояниями. В зависимости от положения переключателя S1 счетчик делит частоту импульсов: в. положении 0,67 — на три, в положении 1,0—на два. В положении 2,0 импульсы поступают непосредственно с выхода микросхемы D1. На выходе счетчика включены две микросхемы D5 и D6, которые управляют включением реле К1. При срабатывании этого реле начинает вращаться реверсивный двигатель Ml механизма изменения угла наклона корпуса маятникового датчика, поворачивая при этом через редуктор 14 (см. рис. 85) винт 11. При вращении винта 11 перемещается фигурная гайка 8, увлекая за собой вилку 7, связанную с площадкой 5, которая поворачивается вокруг своей оси 3. Для уменьшения нагрузок на передачу ось площадки совпадает с центром тяжести маятникового датчика. На верхней части винта 11 закреплен кулачок 15 с четырьмя толкателями. При повороте винта на 1/4 оборота кулачок разрывает цепь микровыключателя 16, закрепленного на крышке редуктора, и двигатель 13 останавливается. Угол поворота площадки при повороте винта на 'Д оборота соответствует превышению на базе ширины колеи 1 мм. Для контроля набираемого возвышения используется сельсин-датчик 9, связанный передачей, образованной блоками 2 и 10 и тросиком 12, с площадкой 5, а электрически — с сельсин-приемником на пульте управления, оснащенным шкалой. Питающее напряжение к. маятнику и двигателю поступает через разъем 4, закрепленный на основании 6 механизма. Кроме автоматического управления от датчика пути предусмотрено ручное управление механизмом кнопками 10 и 11 (см. рис. 83), для чего переключатель 6 переводят в положение «Ручное управление». При нажатии кнопки 11 и предварительном включении переключателя 5 в положение «Возвышение лев.» или «Возвышение прав.» двигатель механизма изменения угла наклона вращается непрерывно, а при нажатии кнопки 10 — импульсно, т. е. каждое ее нажатие соответствует превышению 1 мм. Настройку системы необходимо производить на прямом участке пути с нулевым возвышением. Для этого машину ВПО-ЗООО ставят на контрольном участке, опускают электромагниты с закрепленным на балке механизмом изменения угла наклона корпуса бесконтактного маятникового датчика. На пульте управления включают тумблер 2 «Сеть», при этом должна загореться лампочка «Сеть». От пульта отключают разъем, приходящий от маятникового датчика, и замеряют тестером напряжение на выходе ножек 1 и 7 микросхемы А1 (см. рис. 84). Резистором R8 устанавливают напряжение на выходе микросхемы, равное нулю. Затем подключают к пульту маятниковый датчик. Не включая исполнительного двигателя механизма подъема, переводят переключатель режима работы машины в положение «Автоматическое». При этом на правом пульте машины загорится лампа, указывающая знак команды (например, «Подъем левого магнита»). В этом случае переключатель 5 на пульте автомата уровня (см. рис. 83) ставят в положение «Возвышение прав.», установив предварительно переключатель 6 в положение «Ручное управление», и нажимают кнопку 10 до тех пор, пока не исчезнет команда на подъем левого магнита. Продолжая далее нажимать на кнопку 10, подсчитывают, сколько импульсов идет на механизм изменения угла наклона до момента, когда появится команда на опускание левого магнита. Зона от момента исчезновения команды на подъем магнита до появления команды на его опускание и наоборот должна составить 2—3 импульса, т. е. зона нечувствительности системы должна быть 2—3 мм. Admin добавил 29.01.2011 в 09:51 Таким образом устанавливают маятниковый датчик в нулевое положение, чтобы отсутствовали команды на опускание или подъем электромагнита. При этом обращают внимание на то, чтобы в механизме изменения угла наклона (см. рис. 85) гайка 8 находилась приблизительно посередине винта 11. При нулевом положении бесконтактного маятникового датчика регулируют шкалу 4 сельсин-приемника на пульте управления (см. рис. 83). Для этого ослабляют крепежные винты сельсин-приемника и поворачивают его корпус так, чтобы риска совместилась с нулевым показанием шкалы. Правильность набора отвода возвышения проверяют в автоматическом режиме. Для этого переключатель 5 ставят в положение «Возвышение лев.», а переключатель 6 в положение 0,67. Поворачивая колесо с датчиком пути убеждаются в том, что шкала сельсин-приемника поворачивается под воздействием импульсов от датчика пути. Проверку осуществляют и при других градиентах отвода (1,0 и 2,0). При работе на прямом участке пути бесконтактный маятниковый датчик с помощью механизма изменения его угла наклона устанавливают в требуемое положение по шкале сельсин-приемника. Переключатель 5 ставят в нейтральное положение, а переключатель 6 — в положение «Ручное управление». Для работы в круговой кривой переключатель нитей, расположенный на правом пульте машины, устанавливают на правой кривой в положение — управление левым электромагнитом; на левой кривой — управление правым электромагнитом. При зарядке машины в круговой кривой по сельсинному указателю 4 (см. рис. 83) устанавливают требуемое возвышение и далее переключатели 5 и 6 ставят в то же положение, что и при работе на прямом участке. В переходной кривой переключатель нитей на правом пульте машины устанавливают в положение, аналогичное тому, как в круговой кривой. При входе машины ВПО-3000 в переходную кривую с прямого участка пути переключатель 6 устанавливают в положение, соответствующее требуемому отводу возвышения для данной кривой. При проходе балки подъемных электромагнитов машины ВПО-3000 через точку начала переходной кривой переключатель 5 устанавливают в положение, соответствующее заданному направлению отвода возвышения. В процессе движения по переходной кривой контролируют соответствие набираемой величины отвода по сельсинному указателю 4 возвышению, записанному на обочине пути. Если наблюдается несоответствие, то с помощью переключателя 6 изменяют первоначально установленное значение отвода возвышения в сторону уменьшения или увеличения. При входе машины ВПО-3000 в переходную кривую из круговой кривой переключатель 6 устанавливают в положение, соответствующее отводу возвышения для данной переходной кривой. При проходе подъемных электромагнитов машины через точку начала переходной кривой переключатель 5 устанавливают в положение, противоположное имеющемуся возвышению пути. При достижении магнитами машины точки конца переходной кривой переключатель 5 устанавливают в нейтральное положение. Если машина ВПО-3000 начинает работать на переходной кривой, переключателем 5 устанавливают направление кривой, а переключатель 6 — в положение «Ручное управление», и кнопкой вручную по сельсинному указателю 4 устанавливают заданное превышение. Затем переключателем выставляют требуемый отвод и далее работают в процессе движения машины, набирая возвышение до требуемой величины на круговой кривой. 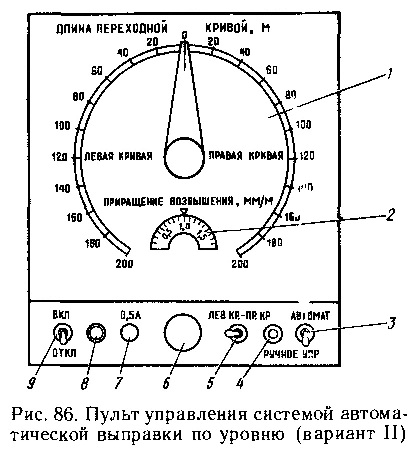 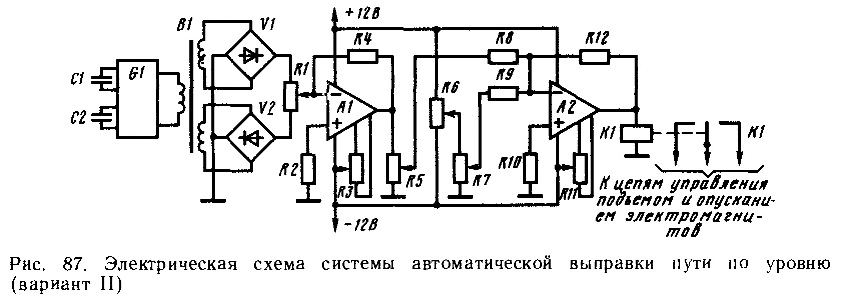 Анализ положения пути в кривых участках показал, что практически в ряде случаев отвод возвышения в переходных кривых не соответствует нормативным градиентам 0,67/1000; 1/1000 и 2/1000. Поэтому на ряде машин установлен другой вариант системы автоматической выправки положения пути по уровню, позволяющий осуществлять автоматическое управление выправкой в переходных кривых при любых сочетаниях длин переходных кривых и возвышениях в круговых кривых. Этот вариант системы состоит из бесконтактного маятникового датчика, датчика пути и пульта управления. Бесконтактный маятниковый датчик и датчик пути аналогичны тем, которые использовались в первом варианте. Изменился несколько пульт управления (рис. 86) и электрическая схема (рис. 87). Admin добавил 29.01.2011 в 09:58 Схема питания, усилитель сигналов А1 и генератор G1 для питания бесконтактного маятникового датчика такие же, как и в первом варианте. Второй вариант схемы отличается тем, что дополнительно включены два переменных резистора R6 и R7, усилитель А2, шаговый двигатель и схема управления этим двигателем. Резистором R6 осуществляется плавная регулировка приращений возвышений на 1 м пути от 0 до 3/1000 (3 мм на 1 м пути). Диапазон приращений взят с некоторым запасом. Резистор R7 электрически связан с резистором R6 и бесконтактным маятниковым датчиком, так как сигналы с этих элементов суммируются на входе усилителя А2. Резистор R7 механически связан с шаговым двигателем, который вращается под действием импульсов, поступающих по мере движения машины от датчика пути, и поворачивается при движении машины в переходной кривой. Электрическая схема управления шаговым двигателем в этой системе идентична схеме управления шаговым двигателем в системе автоматического управления выправкой пути в плане (рихтовкой), описанной ниже. Для обеспечения определенных параметров кривой необходимо воспользоваться таблицей приращения возвышения на 1 м пути, которая имеется на машине. Найденное из таблицы приращение выставляют переменным резистором, связанным с ручкой 6 шкалы 2 приращения возвышения (см. рис. 86). При подходе к переходной кривой тумблером 5 задают направление отвода «Лев. кр.» или «Прав. кр.». Когда балка электромагнитов, на которой установлен бесконтактный маятниковый датчик, поравняется с началом переходной кривой, тумблер 3 переводят в положение «Автомат». На пульте управления имеется шкала / длин переходных кривых, отградуированная в метрах. Стрелка этой шкалы связана с валом задающего резистора. По мере движения машины стрелка будет поворачиваться на угол, пропорциональный длине переходной кривой. Как только по шкале будет достигнута требуемая длина переходной кривой, тумблер 3 переводят в положение «Ручное управление» и набор отвода возвышения прекращается. Таким образом,, в этом варианте набор отвода возвышения осуществляется ие за счет изменения угла наклона корпуса бесконтактного маятникового датчика, а за счет суммирования электрических сигналов от этого датчика и задающего резистора. Управлять поворотом шагового двигателя можно не только в автоматическом режиме, но и вручную. Для этого тумблер 3 ставят в положение «Ручное управление», задают направление возвышения тумблером 5 и нажимают на кнопку 4. Кроме указанных выше переключателей, на передней панели пульта установлены: тумблер 9 включения питающего напряжения, контрольная лампа 8 питающего напряжения и предохранитель 7. Оценка качества работы системы автоматической выправки положения пути по уровню осуществляется с помощью контрольных устройств. На основании информации, получаемой от этих устройств, при необходимости вводятся коррективы в настройку системы автоматической выправки пути по уровню. Измерение положения пути по уровню в устройствах контроля осуществляется с помощью двух бесконтактных малогабаритных маятниковых датчиков. Один из них В1 (рис. 88) устанавливается на тележке около электромагнитов и служит для измерения положения пути по уровню в зоне выправки и подбивки. Другой маятниковый датчик В2 устанавливается на измерительной тележке, расположенной сзади машины, и служит для контроля положения пути по уровню за машиной. С помощью переключателя S1 один из маятниковых датчиков (В1 или В2) в зависимости от того, где нужно контролировать путь, через выпрямительные мосты VI—V4 подключается к вольтметру R1 постоянного тока с цифровой индикацией. Параллельное вольтметром маятниковый датчик В2 подключается к регистрирующему прибору Р2 — самописцу, записывающему на ленту состояние пути по уровню за машиной. Применен серийный самописец, у которого привод диаграммной ленты осуществляется шаговым двигателем пропорционально пройденному машиной пути от сигналов с датчика пути ВЗ. Схема управления шаговым двигателем унифицирована с аналогичными схемами в системах выправки пути по уровню и в плане. Масштаб записи по длине пути составляет 1:1000 или 1:400. Контрольный блок с цифровым вольтметром размещают на одном из пультов машины ВПО-3000. До установки указанных устройств на машину выполняют следующие регулировочные работы. Каждый маятниковый датчик устанавливают на стенд, позволяющий с высокой точностью изменять и фиксировать угол наклона этого датчика. Датчик устанавливают в такое положение, чтобы на табло цифрового вольтметра Р1 были нули. Затем от нулевого положения маятниковый датчик наклоняют в одну и другую сторону на фиксированный угол. Регулировкой переменного резистора R1 (см. рис. 88) добиваются, чтобы показания цифрового вольтметра при наклоне маятника в ту и другую сторону были одинаковы. Различие должно быть только в знаке. 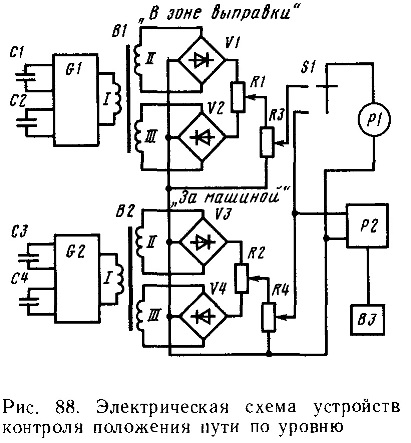 При регулировке масштаба маятниковый датчик наклоняют от нулевого положения на угол 4,3°, что соответствует возвышению 120 мм. Регулировкой переменного резистора R3 добиваются, чтобы показание цифрового вольтметра было «120». При наклоне маятникового датчика в другую сторону на угол 4,3° показание цифрового вольтметра должно составить также «120», но другого знака. Аналогичные регулировочные работы проводят с другим маятниковым датчиком В2 для канала «За машиной». Далее маятниковые датчики В1 и В2 устанавливают на машину и подключают к контрольному блоку. Маятниковый датчик В2 за машиной параллельно подключают к самописцу Р2. При первоначальной установке маятниковых датчиков также выполняют регулировочные работы. Для этого в непосредственной близости от измерительной тележки заранее проверенным путевым шаблоном измеряют положение пути по уровню, а маятниковый датчик при этом фиксируют в таком положении, чтобы показание цифрового вольтметра (канал измерения «За машиной») соответствовало пока ;анию путевого шаблона. Аналогичные peгулировочные работы выполняют в зоне выправки. Для плавной регулировки положения маятникового датчика его устанавливают на дополнительную площадку, угол наклона которой относительно балки магнитов или рамы измерительной тележки может плавно, в небольшом диапазоне, регулироваться. Чтобы защитить корпуса маятниковых датчиков от грязи и попадания влаги, на них устанавливают кожуха. 25. Система автоматической выправки пути в продольном профиле и плане Трехточечная система расположена в пределах фермы машины и работает по принципу сглаживания, минимальный радиус выправляемой кривой 300 м. В систему входят: три измерительные тележки с соответствующими механизмами подъема и опускания их; трос-хор-да с натяжным устройством; измерительный механизм, расположенный на средней измерительной тележке; пульты управления продольным профилем и рихтовкой, расположенные на правом основном пульте машины ВПО-3000; датчик пути, исполнительный механизм подъема и сдвига пути. Датчик пути используется из системы автоматической выправки пути по уровню.  Передняя измерительная тележка 1 (см. рис. 80) расположена впереди, средняя 2 — за подъемными электромагнитами, а задняя 3 — перед задней ходовой тележкой машины. Геометрический коэффициент сглаживания такой системы составляет 6,6—7 (в зависимости от привязки измерительных тележек к ферме машины). Наряду с таким расположением на некоторых машинах переднюю измерительную тележку 1 устанавливают перед задней ходовой тележкой турного вагона. В этом случае вся длина системы составляет 30— 32 м (в зависимости от конкретных мест привязок тележек к ферме вагона и машины), а геометрический коэффициент сглаживания — 10—11, что соответствует оптимальной величине. Положение пути в плане и в продольном профиле относительно трос-хорды измеряется механизмом (рис. 89). Перемещение трос-хорды 9 в горизонтальной (в плане) и вертикальной (в продольном профиле) плоскостях повторяется передвижением вилки 5 в горизонтальной плоскости по направляющей 4 и поворотом ее в вертикальной плоскости. Через трособлочные передачи 6, 7 и 2, 8 вилка 5 связана с прецизионными потенциометрами 1 для измерения перемещения трос-хорды в продольном профиле и 10 — в плане. Таким образом, вертикальное и горизонтальное перемещения вилки преобразуются в поворот соответствующего потенциометра, а затем в изменение электрического сигнала. Конструкция механизма крепится на плите 3, которая устанавливается на средней измерительной тележке. Задание требуемой подъемки пути осуществляется на пульте продольного профиля (рис. 90) вращением рукоятки 2, связанной с потенциометром-задатчиком подъемки и указательной стрелкой 6 по шкале 1, отградуированной в миллиметрах подъемки. Питание системы управления продольным профилем осуществляется' от батарей машины и подается в пульт включением тумблера 4. Контрольная лампа 5 показывает наличие питающего напряжения. Кроме того, на передней панели пульта имеется предохранитель 3. 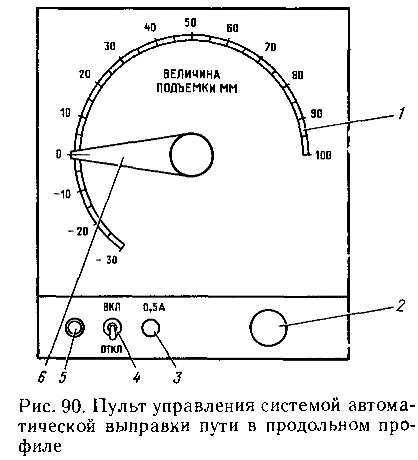 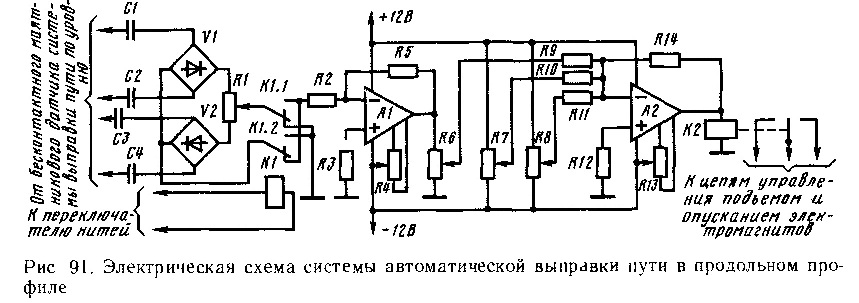 Управление выправкой пути в продольном профиле основано на равенстве напряжений, подаваемых с потенциометров R7 и R8 на вход усилителя А2 (рис. 91). Потенциометр R8 установлен на измерительном механизме и служит для измерения вертикального перемещения трос-хорды относительно корпуса средней измерительной тележки, а потенциометр R7 установлен в пульте продольного профиля и служит для задания величины подъемки пути и обеспечения плавных отводов при завершении работы машины. Если электрические сигналы, снимаемые с потенциометров R7 и R8 равны, напряжение на выходе усилителя близко к нулю, и реле К2 обесточено. При повороте вала потенциометра R8, что соответствует перемещению вилки измерительного механизма, или R7, который является задатчиком подъемки пути и поворачивается вручную . Так как трос-хорда системы располагается по оси пути, то на выправку пути в продольном профиле влияет изменение его положения по уровню. Для того чтобы избежать этого влияния иа качество выправки пути, в систему введены бесконтактные маятниковые датчики, установленные на всех трех измерительных тележках системы. На рис. 91 приведена только схема компенсации перекоса по уровню средней измерительной тележки. Она включает в себя выпрямительные мосты VI и V2, собранные на диодах, с которых напряжение через балансный резистор R1 подается на вход усилителя А1 и дглее через масштабный резистор R6 на вход усилителя А2. На входы выпрямительных мостов напряжение подается через емкости С1 + С4 с измерительных обмоток маятникового датчика. Сущность компенсации заключается в следующем. При изменении положения пути по уровню измерительная тележка перекашивается на угол а2, соответственно перекашивается измерительная вилка и появляется ложный сигнал на выправку пути в продольном профиле. Вместе с тележкой на угол а2 перекашивается и маятниковый датчик и выдает сигнал противоположного знака. Величина этого сигнала при первоначальной настройке системы регулируется таким образом, чтобы она была равна величине ложного сигнала, возникшего в системе автоматической выправки пути в продольном профиле. Таким образом, ложный сигнал компенсируется как по знаку, так и по величине. 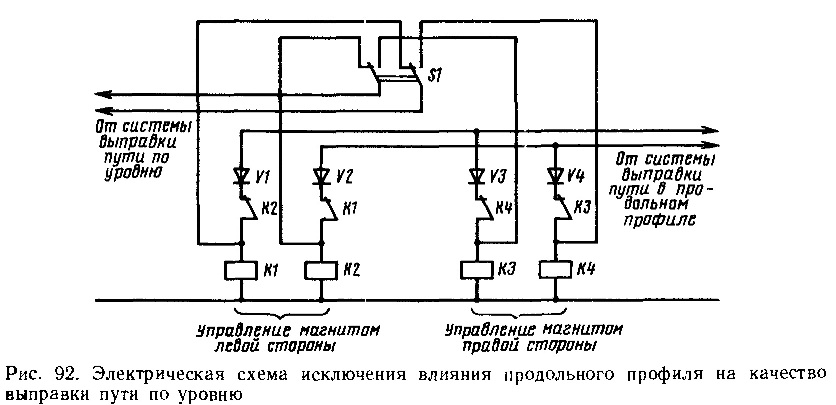 Для разделения команд на подъем и опускание магнитов машины от систем управления выправкой пути по уровню и в продольном профиле разработана схема включения реле управления приводами подъемных электромагнитов (рис. 92). Из приведенной схемы видно, что при отсутствии управляющей команды от системы выправки пути по уровню сигнал от системы выправки пути в продольном профиле управляет сразу двумя электромагнитами. При появлении управляющей команды от системы выправки пути по уровню управление электромагнитами осуществляется раздельно (одного электромагнита от системы выправки пути по уровню, а другого — от системы выправки пути в продольном профиле). Это достигается тем, что сигналы от системы выправки пути по уровню приходят непосредственно на обмотки реле К/, К2 или КЗ, К4 в зависимости от положения переключателя S1. Сигнал от системы выправки пути в продольном профиле приходит на те же реле через диоды VI — V4 и блокирующие контакты реле К1 — К4. 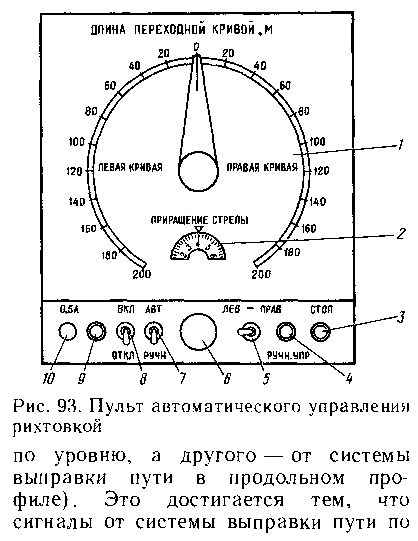  Элементы управления рихтовкой размещены в пульте рихтовки (рис. 93), который имеет две шкалы: по одной из них 2 задают величину приращения стрелы на 5-метровом отрезке пути при помощи рукоятки 6, по другой 1 — отсчитывают длину переходной кривой. Кроме этого, на пульте имеется тумблер включения питающего напряжения 8, переключатель 5 направления кривой, тумблер 7 выбора режима управления рихтовкой в переходной кривой, кнопка 4 управления в переходной кривой при ручном режиме, индикаторная лампа 9, предохранитель сетевого напряжения 10, контрольная лампа 3 аварийного режима — обрыв тросика в измерительном механизме Управление рихтовкой осуществляется от электрических сигналов (рис 94), подаваемых с потенциометра R7 и потенциометра R4 задания величины приращения стрелы на пульте рихтовки, начальное напряжение на котором устанавливается потенциометром R5 При работе на прямом участке пути потенциометры R5 и R4 находятся в нулевом положении (R5 в крайнем нижнем положении, R4—в среднем), и реле К1, включенное на выходе усилителя А2, подает команду на механизм сдвига пути только под воздействием сигналов, поступающих с потенциометра R7, который измеряет перемещение трос-хорды в горизонтальной плоскости относительно рамы тележки Для управления в кривых участках пути используются потенциометры R4 и R5, шаговый двигатель Ml, пита ние которого осуществляется напряжением + 24 В от батарей машины Для питания элементов управления шаговым двигателем предусмотрен трансформатор 77, выпрямительный мост VI, собранный на диодах, стабилизатор, состоящий из транзисторов V3, V4, стабилитрона V2, резистора R1 и конденсатора С2 Управление шаговым двигателем Ml в автоматическом режиме осуществляется от датчика пути При этом переключатель S2 должен находиться в положении «Авт » В этом случае сигналы от датчика пути, сформированные в импульсный сигнал элементом D1, через счетчик (элементы D3 и D4) и дешифратор (элементы D5 1—D5 4) поступают на усилители мощности, роль которых выполняют транзисторы V6, V8, V10, V12, и далее на обмотки шагового электродвигателя Ml Кроме того, управление шаговым двигателем может осуществляться вручную при помощи кнопки S4. В этом случае переключатель S2 ставят в положение «Ручн.», а импульсы на двигатель подаются с генератора D2. Admin добавил 29.01.2011 в 10:14 Настройка трехкоординатной системы выправки пути на машине ВПО-3000 и порядок работы с ней Настройку рихтовочной системы начинают с измерительного механизма Для этого измерительную каретку выставляют по центру направляющей, а в пульте управления рихтовкой отключают плату усилителей Не смещая каретку из среднего положения, измеряют напряжение на выходе потенциометра R7 Оно должно быть равно нулю Если этого не соблюдается, отворачивают на 0,5—1 оборот винты крепления потенциометра на измерительной тележке и устанавливают корпус потенциометра рихтовки в такое положение, при котором напряжение на его выходе равно нулю При этом стрелка указателя на самом потенциометре должна показывать 165°. Затем устанавливают в ноль потенциометр R5, а потенциометр R4 — в среднее положение, чтобы указатель этого потенциометра показывал 165°. Измеряют напряжение на выходе микросхемы А1 С помощью подстроечного резистора R6 регулируют, чтобы на выходе этой микросхемы напряжение было равно нулю В указанных выше положениях потенциометров R4, R5 и R6 измеряют напряжение на выходе усилителя А2 С помощью переменного резистора R12 добиваются, чтобы это напряжение было также равно нулю При этом реле К1 не подает команды на исполнительный механизм сдвига пути Далее проверяют правильность настройки нулей схемы при отключенном приводе механизма сдвига пути Для этого потенциометры R7 и R4 оставляют в среднем положении и меняют вручную угол поворота потенциометра R5 от 0 до 330°. При этом не должна появляться команда на сдвиг пути «влево» или «вправо». Если она появилась, то, поворачивая на небольшой угол потенциометр R4, ее компенсируют. В этом положении потенциометра R4 проверяют, чтобы при повороте потенциометра R5 от 0 до 330° команды не появилось. Затем освобождают крепление стрелки на шкале длины переходной кривой пульта рихтовки, совмещают стрелку с нулем шкалы и фиксируют в этом положении. Потенциометр R5 выставляют в нулевое положение и, вращая потенциометр R4 от нуля в одну и другую сторону при ручном управлении шагового двигателя, проверяют, чтобы не появилась команда на сдвиг пути. Если это соблюдается, то нули схемы настроены правильно. Дальнейшую настройку системы осуществляют на прямом нулевом участке пути, на котором в местах расположения измерительных тележек системы вертикальные и горизонтальные стрелы, а также уровень должны быть равны нулю. На этом участке опускают все измерительные тележки, натягивают трос-хорду и прижимают тележку в горизонтальной плоскости к одной рельсовой нити, например правой по ходу машины. На рельсы опускают электромагниты и затем отключают двигатели механизмов подъема и сдвига пути. Для каждой измерительной тележки системы измеряют расстояние от боковой поверхности правой рельсовой нити до трос-хорды. На нулевом участке пути эти расстояния должны быть равны. Если имеется небольшое отклонение особенно для задней и средней точек, путь рихтуют, чтобы сделать эти расстояния одинаковыми. Все стрелки на пульте рихтовки устанавливают в нулевое положение. При этом реле К.1 должно быть обесточено, т. е. погашены сигнальные лампочки на правом пульте машины, показывающие на сдвиг магнитов «влево» или «вправо». Если присутствует команда, тона измерительном механизме (см. рис. 89) отвертывают винты крепления планки, фиксирующей тросик 2 на измерительной вилке 5, и перемещают тросик совместно с блоком 8 до тех пор, пока не исчезнут команды на сдвиг магнитов. В этом положении фиксируют указанной планкой тросик 2 на вилке 5. Возможные перемещения тросика 2 с блоком 8 в процессе регулировки должны быть незначительны. После выполнения указанных выше регулировок рихтовочная система подготовлена к работе. Настройку системы автоматической выправки пути в продольном профиле также производят на нулевом участке. Первоначально стыкуют и настраивают бесконтактный маятниковый датчик системы автоматической выправки пути по уровню с системой продольного профиля. Для этого бесконтактный маятниковый датчик выставляют в нулевое положение, чтобы не было команд на подъем или опускание магнитов в системе выправки пути по уровню. После установки нуля включают пульт системы выправки пути в продольном профиле. На выходе диодных мостов VI, V2 (см. рис. 91) замеряют напряжение, которое устанавливается равным нулю подстройкой резистора RI. Затем измеряют напряжение на выходе усилителя микросхемы А/. Подстройкой резистора R4 добиваются, чтобы это напряжений также было равно нулю. Следующим этапом является настройка потенциометров 1 на измерительной тележке (см. рис. 89) или R8 (см. рис. 91) и R7 в пульте управления продольным профилем. В местах расположения трех измерительных тележек измеряют с точностью 1 мм расстояния от прямой, соединяющей верхние поверхности катания рельсов, до трос-хорды в местах расположения измерительных тележек. На нулевом участке они должны лежать на одной прямой Изменяя положение корпуса потенциометра, добиваются, чтобы на его выходе напряжение было равно нулю. Регулируя положение потенциометра R7, добиваются, чтобы на его выходе напряжение также было равно нулю. Команды на подъем или опускание электромагнитов должны отсутствовать. При этом потенциометр R7 и находящуюся в нулевом положении стрелку указателя подъемки фиксируют. Далее настраивают устройство компенсации влияния уровня на продольный профиль. При этом вначале выбирают базовую нить пути, например правую. Таким образом, по правой нити будет осуществляться выправка пути в продольном профиле, а левая нить будет подстраиваться по уровню. Затем имитируют появление ложной команды от положения пути по уровню в системе продольного профиля, положив под левое колесо средней измерительной тележки прокладку толщиной 15 мм. В этом случае команды в системе выправки пути в продольном профиле не должно быть. В противном случае регулируют подстроенный потенциометр R6 до исчезновения команды на подъем правой нити. Закончив настройку устройства компенсации, среднюю измерительную тележку устанавливают в исходное нулевое положение. Перед выездом машины ВПО-3000 на перегон проверяют: отсутствие люфтов между вертикальной балкой подвески электромагнитов и катками механизма сдвига (при обнаружении зазоров на рабочей части направляющих вваривают соответствующей толщины листы); исправность всех агрегатов выправочных систем; легкость перемещения измерительной вилки в горизонтальной и вертикальной плоскостях и отсутствие люфта между прорезью измерительной вилки и трос-хордой. Работу машины ВПО-3000 целесообразно начинать на участке, имеющем удовлетворительное состояние пути в плане и в продольном профиле. При зарядке машины ВПО-3000 обеспечивают минимальный (0,5— 1 мм) зазор между рихтующими роликами и боковыми поверхностями рельсовых нитей пути. Все три измерительные тележки опускают и прижимают их в горизонтальной плоскости к одной рельсовой нити. Среднюю тележку дополнительно прижимают в вертикальной плоскости. Перед началом работы ВПО-3000 с системой автоматической выправки пути в продольном профиле на ремонтируемом участке пути выбирают одну нить за базовую, которая будет выправляться системой выправки пути в продольном профиле, а вторая — системой выправки пути по уровню будет подстраиваться под базовую нить. Для примера правая нить принимается базовой, а левая — будет выправляться по уровню. При зарядке машины систему выправки пути по уровню по указателю отвода возвышения выставляют в требуемое положение и включают в работу в начале движения машины. Систему выправки пути в продольном профиле в начале работы не включают. При этом требуемую подъемку пути задают постепенно при движении машины на ручном (кнопочном) управлении подъемом базовой (правой) нити. Затем на пульте системы выправки продольного профиля устанавливают по шкале требуемую подъемку и после того, как машина пройдет 20—25 м пути, включают систему автоматической выправки пути в продольном профиле. Причем включение вначале производят кратковременно, наблюдая за командами, возникающими на перемещение базовой нити пути по световому табло Убедившись в том, что управляющие команды от автоматической системы находятся около нуля, включают пульт постоянно. Если в процессе работы машины потребовалось изменить подъемку пути, поворачивают стрелку на пульте в сторону увеличения или уменьшения подъемки пути. Для обеспечения плавного отвода пути (25—30 м до места разрядки машины ВПО-3000) на пульте продольного профиля постепенно уменьшают подъемку пути, доведя ее к концу работы машины до 0-10 мм. Работа машины с системой автоматической выправки пути в плане (рихтовочной системы) возможна на прямом участке пути и различных сочетаниях кривых участков пути. После подготовки к работе измерительных тележек на прямом участке пути при отключенных двигателях механизмов подъема и сдвига пути включают пульт управления рихтовкой и устанавливают задатчики приращения стрел изгиба и длины переходной кривой в нулевое положение. Если команды иа сдвиг пути отсутствуют, начинают работу машины с постоянно включенным пультом рихтовки. В противном случае в начале работы машины пульт рихтовки включают кратковременно до тех пор, пока не исчезнет команда на сдвиг или не появится команда противоположного направления. После этого пульт управления рихтовкой включают постоянно. Для того чтобы избегать «углов» в пути при. зарядке и остановках машины, указанные операции целесообразно выполнять после каждой остановки машины. Для того чтобы рихтовочная система автоматически вписывалась в переходную кривую и вошла в круговую, необходимы следующие данные: начало переходной кривой (НПК), радиус круговой кривой RKK и длина переходной кривой lпк. Для работы в переходных кривых на машине имеется таблица, по которой для заданных RKK и lпк находят приращение стрелы ДЕЛЬТАfпк на 5-метровом отрезке пути. Приращения стрел определяются по формуле 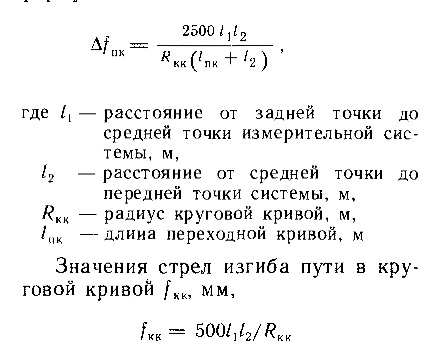 При подходе к началу переходной кривой с помощью потенциометра по шкале 2 (см. рис. 93) устанавливают на пульте значение приращения стрелы ДЕЛЬТАfпк тумблером 5 задают направление изменения кривизны пути Когда передняя измерительная тележка системы совпадает с началом переходной кривой, тумблер 7 переводят в положение «Авт.», т. е. включают связь между датчиком пути и задатчиком длины переходной кривой. При движении машины по мере поступления сигналов от датчика пути стрела переходной кривой растет. К моменту, когда стрелка длины переходной кривой дойдет до lпк+ l2, т. е. будет достигнута требуемая стрела круговой кривой lкк, тумблер 7 переводят из режима «Авт.» в режим «Ручн ». При выходе из круговой кривой возможно несколько вариантов.   По достижении этой величины на шкале 1 тумблер 7 (см. рис. 93) переводят в режим «Ручн.». Последний раз редактировалось Admin; 29.01.2011 в 09:14. Причина: Добавлено сообщение |
|
|
Цитировать 14 |
| Поблагодарили: |
Данный пост получил благодарности от пользователей
|
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| Устройства ЧДК | santuzzo | Общие вопросы эксплуатации устройств СЦБ | 27 | 28.03.2017 10:55 |
| =Реферат= Выправочно-подбивочно-рихтовочные машины Duomatic, Unimat | Admin | Студенту-путeйцу | 0 | 23.03.2011 21:29 |
| [ОМ] К машине – с любовью | Admin | Газета "Октябрьская магистраль" | 0 | 03.02.2011 19:34 |
| =Разное= Горочные устройства | Толян | Дипломы, курсовые, лекции, рефераты по СЦБ | 0 | 16.03.2010 21:03 |
| Устройства АТС в метрополитенах | СЦБист | Рефераты | 0 | 10.11.2009 15:34 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , , , , , , , , , , , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|








