



|
|
|
|||||||
|
|
#1 (ссылка) |
|
Crow indian







Регистрация: 21.02.2009
Возраст: 41
Сообщений: 30,380
Поблагодарил: 398 раз(а)
Поблагодарили 6046 раз(а)
Фотоальбомы:
2624 фото
Записей в дневнике: 904
Репутация: 126146
|
Тема: [03-2023] Автоматизация позиционирования подвижного состава в системах закрепления на железнодорожных станцияхАвтоматизация позиционирования подвижного состава в системах закрепления на железнодорожных станциях ОЛЬГЕЙЗЕР Иван Александрович, АО «Научно-исследовательский и проектно-конструкторский институт информатизации, автоматизации и связи на железнодорожном транспорте», начальник отделения инновационных и интеллектуальных технологий цифровой станции Ростовского филиала, канд. техн, наук, г. Ростов-на-Дону, Россия СУХАНОВ Андрей Валерьевич, АО «Научно-исследовательский и проектно-конструкторский институт информатизации, автоматизации и связи на железнодорожном транспорте», отделение инновационных и интеллектуальных технологий цифровой станции Ростовского филиала, заместитель начальника, доцент, канд. техн, наук, г. Ростов-на-Дону, Россия КОРНИЕНКО Константин Ильич, АО «Научно-исследовательский и проектно-конструкторский институт информатизации, автоматизации и связи на железнодорожном транспорте», отделение инновационных и интеллектуальных технологий цифровой станции Ростовского филиала, старший научный сотрудник, канд. техн, наук, г. Ростов-на-Дону, Россия ПАСТУШЕНКО Дмитрий Андреевич, АО «Научно-исследовательский и проектно-конструкторский институт информатизации, автоматизации и связи на железнодорожном транспорте», отделение инновационных и интеллектуальных технологий цифровой станции Ростовского филиала, инженер-программист, г. Ростов-на-Дону, Россия Ключевые слова: сортировочные станции, комплекс «ПРИЦЕЛ», время ожидания, эксплуатационные расходы, капитальные расходы Аннотация. Рассмотрен вопрос автоматизации позиционирования подвижного состава при его закреплении, решение которого позволит реализовать безлюдные технологии в приемо-отправочных парках железнодорожных станций. Представлен комплекс позиционирования и контроля закрепления составов на путях железнодорожных станций «ПРИЦЕЛ», разработанный специалистами АО «НИИАС». Приведены основные характеристики и преимущества комплекса. Описаны полученные в ходе разработки результаты, дальнейшие шаги по реализации проекта и характеристики объекта внедрения опытного образца. Железнодорожный подвижной состав, оставляемый на станционных железнодорожных путях, а также на железнодорожных путях необщего пользования без локомотива согласно Приложению № 2 к ПТЭ [1] закрепляется от самопроизвольного движения тормозными башмаками, стояночными тормозами (ручным, автоматическим или стационарными средствами закрепления до отцепки локомотива).  Долгое время наиболее применяемым способом закрепления являлись тормозные башмаки. В то же время этот способ имеет много недостатков [2—4]. Например, при укладке тормозных башмаков не исключены травмы составителей, которые находятся в опасной зоне. В случае закрепления разнородного состава требуется значительно большее количество укладываемых тормозных башмаков, соответственно, растут непроизводственные затраты на их перенос от стеллажа до подвижного состава и обратно. Кроме того, существует риск оставления тормозных башмаков под подвижным составом. Не редки случаи приваривания тормозного башмака и схода подвижного состава. На крупных станциях, где ежедневно выполняется более 50 операций по смене локомотива, во время процесса по закреплению и раскреплению около 8-10 ч тратится на простой локомотивов в ожидании закрепления и снятия закрепления. Причем в этом процессе занято 6-10 составителей. Именно поэтому начали активно развиваться механизированные системы закрепления. Одним из основных средств механизированного закрепления долгое время оставался стационарный тормозной упор (УТС-380) [5], заменяющий около 10-15 тормозных башмаков. Недостатком УТС является сложность позиционирования, которое возложено на составителя. При закреплении подвижного состава с помощью УТС колесную пару первого вагона необходимо остановить от места установки упора на расстоянии не более 1 м. В связи с этим имеют место случаи, когда в процессе позиционирования машинист локомотива сносил упор, что приводило к его повреждению и необходимости ремонтных работ. Структурная схема управления закреплением подвижного состава при помощи УТС представлена на рис. 1. На схеме видно, что дежурный по станции не имеет технической возможности непосредственно управлять УТС-380. Следовательно, несмотря на то, что тормозной упор механизирует процесс закрепления, использовать его при автоматизации в текущих условиях невозможно. Специалисты АО «НИИАС» длительное время занимаются проблемами автоматизации процессов на станции. В ходе решения вопроса закрепления подвижного состава была разработана структурная схема централизованной автоматизированной системы позиционирования и закрепления,представленная на рис. 2. На основе концепции «Цифровой железнодорожной станции» [6-8] и с учетом возможности применения различныхтипов устройств закрепления подвижного состава (управляемых и неуправляемых) процесс автоматизации закрепления был разделен на два этапа. На первом этапе решалась задача автоматизации управления закреплением, на втором - задача автоматизации позиционирования. На сегодняшний день существуют следующие управляемые и неуправляемые устройства закрепления подвижного состава: домкратовидные; балочные (ЗУБР или УЗС); устройства закрепления с помощью тяжелых упоров (КТС АЗС). С целью автоматизации управления закреплением составов специалисты института разработали общие подходы к выбору технических средств с учетом различных типов устройств закрепления подвижного состава в зависимости от типа профиля, величины уклона и массы поезда (таблица). Например, применение домкратовидных устройств закрепления экономически обоснованно на путях с вогнутым и монотонным продольным профилем, а также с уклоном до 0,001. В связи с тем, что при закреплении большую роль играет человеческий фактор, одним из самых важных модулей автоматизированной системы закрепления подвижного состава является система позиционирования. В функции системы входит правильное позиционирование любых типов подвижного состава в устройствах закрепления без участия человека по команде с удаленного рабочего места или автоматически. Системой, выполняющей такие функции, является комплекс «ПРИЦЕЛ» [9], разрабатываемый специалистами АО «НИИАС». 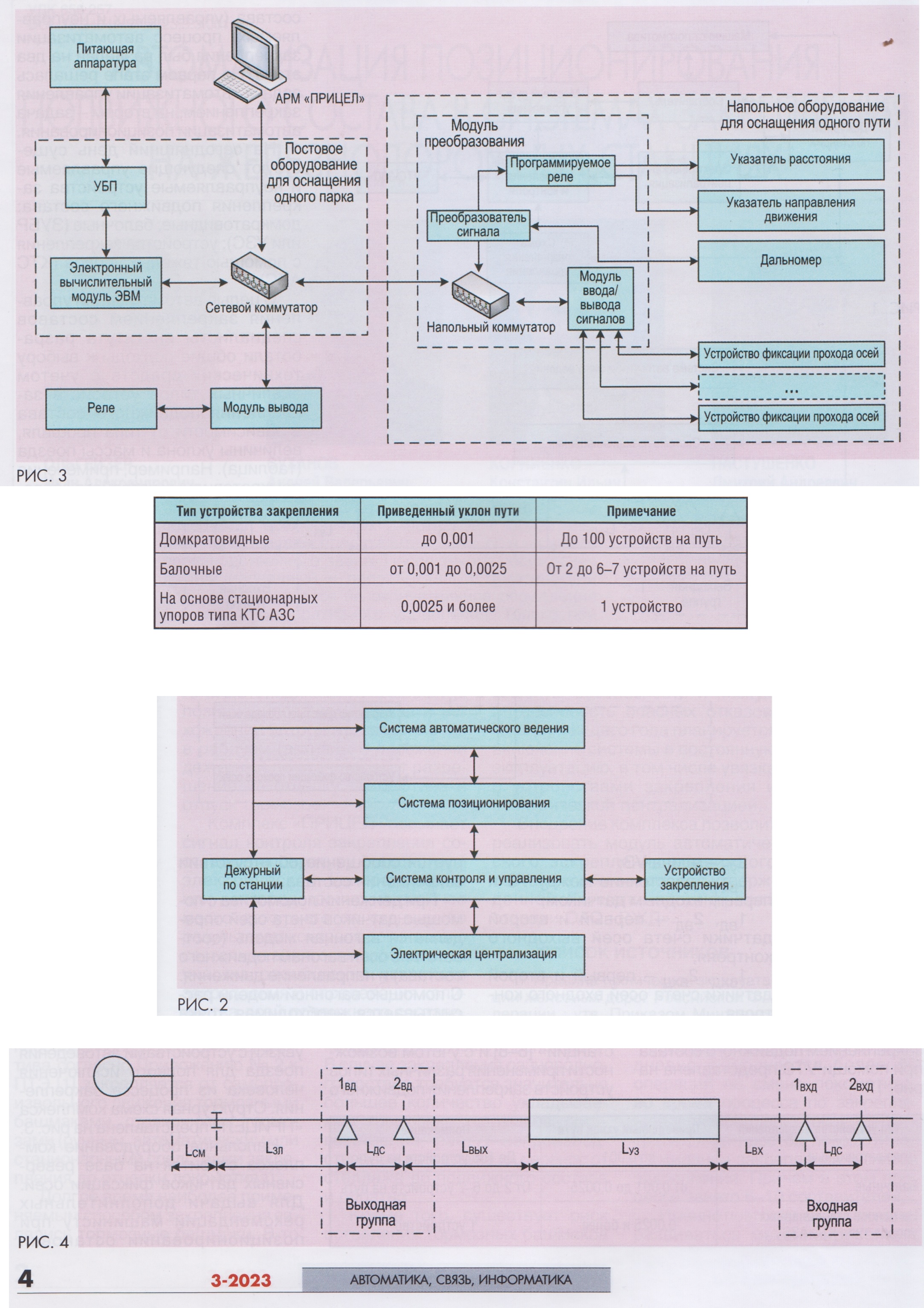 Комплекс создается как высоконадежное средство позиционирования и контроля закрепления составов на путях железнодорожных станций при использовании напольных балочных и домкратовидных устройств закрепления. В нем предусмотрена возможность увязки с устройствами автоведения поезда для полного исключения человека из процесса закрепления. Структурная схема комплекса «ПРИЦЕЛ» представлена на рис. 3. Напольное оборудование комплекса строится на базе реверсивных датчиков фиксации осей. Для выдачи дополнительных рекомендаций машинисту при позиционировании остановки локомотива комплекс может оснащаться напольными указателями со схематичными сигналами: «ВПЕРЕД», «НАЗАД», «ОСТАНОВКА» и указателем расстояния до точки остановки. Взаимное расположение датчиков, дальномеров, информационного табло комплекса зависит от применяемых устройств и местных условий. Пример расположения напольных устройств представлен на рис. 4. На рисунке приняты следующие обозначения:
Технология автоматического позиционирования составов заключается в следующем. В процессе движения состава по станционному пути на мониторе комплекса рядом с изображением соответствующего пути индици руется сообщение об отсутствии закрепления состава. При движении локомотива с помощью датчиков счета осей определяется вагонная модель (соответствие осей вагонам подвижного состава) и направление движения. С помощью вагонной модели рассчитывается необходимая точка остановки. Расстояние до места остановки и направление движения отображаются на соответствующих указателях. Местоположение локомотива определяется с помощью дальномера и проверяется с применением датчиков счета осей на основе вагонной модели. Когда локомотив с составом достигает рекомендуемого места остановки, расстояние до остановки на указателе становится равным 0, локомотив должен остановиться. При этом с помощью вагонной модели проверяется правильность позиционирования для конкретных видов устройств закрепления (количество осей в устройствах закрепления). В случае правильного размещения тележек в первом устройстве (группе устройств) закрепления на мониторе АРМ ДСП индицируется сообщение (например, «Состав на пути № позиционирован верно»). Далее, если устройства закрепления управляемые, дежурный по парку дает команду на перевод устройства закрепления в рабочее положение. Если устройства неуправляемые, в течение 20 с устройства закрепления автоматически переходят в активное положение (положение закрепления). Только после появления на АРМ ДСП индикации о правильном позиционировании состава и нахождении устройств закрепления в рабочем (активном) положении дежурный по станции дает разрешение на отцепку локомотива и отпуск тормозов. Комплекс «ПРИЦЕЛ» посылает сигнал контроля закрепления составов в аппаратуру станционной электрической централизации или непосредственно на рабочее место дежурного по станции по результатам контроля логического состояния занятости/свободности участка размещения устройств закрепления и определения количества осей подвижного состава, находящихся на участке размещения устройств закрепления. ЭЦ должна фиксировать факт закрепления подвижного состава и исключать в этом случае разрешающее показание поездного светофора. В заключение следует отметить, что применение данного комплекса совместно с автоматизиро ванными системами закрепления позволит автоматизировать и значительно сократить время на выполнение операций закрепления и раскрепления составов, а также вывести работников станций из опасных зон на путях. В декабре прошлого года опытный образец комплекса «ПРИЦЕЛ» был установлен на станции Челя-бинск-Главный Южно-Уральской дороги. Сейчас ведутся работы по включению устройств в опытную эксплуатацию. На этапе разработки были подтверждены доказательства безопасности комплекса. Система показала высокую безопасность и низкую интенсивность опасных отказов. К концу текщего года планируется включение системы в постоянную эксплуатацию, в том числе увязка с устройствами закрепления и электрической централизацией. Внедрение комплекса позволит реализовать модуль автоматического закрепления подвижного состава в соответствии с утвержденной Концепцией цифровой станции ОАО «РЖД». СПИСОК источников 1. Правила технической эксплуатации железных дорог Российской Федерации : утв. Приказом Минтранса России от 23 июля 2022 г. № 250. Доступ через СПС «КонсультантПлюс» (дата обращения 9.02.2023). 2. Железнодорожные тормозные горочные башмаки: история и перспективы / С.А. Сапожников, Д.П. Марков, Ж.Г. Воробьёва, И.Н. Воронин, В.И. Маршев, М.В. Забавина // Вестник Научно-исследовательского института железнодорожного транспорта. 2014. № 5. С. 38-43. 3. Ильин А.М., Числов О.Н., Боева А.С. Повышение надежности закрепления подвижного состава на станционных путях // Железнодорожный транспорт. 2020. № 10. С. 24-29. 4. Глушко М.И., Федоров Е.В. Закрепление вагонов автономными средствами // Вагоны и вагонное хозяйство. 2012. № 3. С. 36-37. 5. УТС-380 будет работать надежней//Автоматика, связь, информатика. 2018. № 6. С. 45. 6. Шабельников А.Н., Лябах Н.Н. Перспективы совершенствования КСАУ СП в рамках концепции цифровой железнодорожной станции // Интеллектуальные системы управления на железнодорожном транспорте. Компьютерное и математическое моделирование (ИСУЖТ-2018) : труды седьмой научно-технической конференции, Москва, 14 ноября 2018 года. Москва: Издательство НИИАС, 2018. С. 117-119. 7. Розенберг И.Н., Шабельников А.Н. Инновации на железнодорожном транспорте // Вестник Ростовского государственного университета путей сообщения. 2017. № 3 (67). С.112-118. 8. Долгий А.И. Концептуальный подход к построению современной платформы управления перевозочным процессом в ОАО «РЖД» // Труды АО «НИИАС»: сборник статей. Москва: АО «Т 8 Издательские Технологии», 2021. Том 1, вып. 11. С. 9-31. URL: http://niias.ru/upload/ iblock/07b/ Ь1 ppg6dz3rjv 1 hzabkl 1 gb3 zkylo1q1j.pdf. 9. Пат. № 2788208 РФ B61L 25/00. Система для позиционирования железнодорожного подвижного состава при закреплении механизированными устройствами/Долгий А.И., Корниенко К.И., Ольгейзер И.А., Соколов В.Н., Суханов А.В., Хатламаджиян А.Е.; патентообладатель АО «НИИАС. № 2022124235; заявл. 13.09.2022; опубл. 17.01.2023; Бюл. № 2. |
|
|
Цитировать 14 |
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| [12-2018] Ионисторные накопители энергии в системах тягового подвижного состава | Admin | xx2 | 0 | 16.06.2019 20:48 |
| =Самоучитель ДСП= Основные правила закрепления подвижного состава. Неисправности тормозных башмаков | Admin | Самоучитель ДСП | 2 | 04.12.2016 16:37 |
| =Приказ= № 136 от 22.03.14 г. - О запрете покидать локомотивным бригадам локомотив при отсутствии смены без закрепления подвижного состава | Admin | Документы Дирекции тяги ОАО "РЖД" | 0 | 30.03.2014 07:23 |
| Об основных системах ремонта подвижного состава | Admin | xx2 | 0 | 23.06.2011 06:40 |
| Упоры для механизированного закрепления подвижного состава | Admin | Wiki | 0 | 12.06.2011 19:51 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , , , , , , , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|








