



|
|
|
|
#1 (ссылка) |
|
Crow indian







Регистрация: 21.02.2009
Возраст: 41
Сообщений: 30,426
Поблагодарил: 398 раз(а)
Поблагодарили 6046 раз(а)
Фотоальбомы:
2624 фото
Записей в дневнике: 904
Репутация: 126141
|
Тема: Тепловоз ТЭРА1: результаты тяговых и теплотехнических испытанийТепловоз ТЭРА1: результаты тяговых и теплотехнических испытаний Тягово-теплотехнические испытания российско-американского тепловоза ТЭРА1 (см. «Локомотив» № 1 и 2, 2002 г.) проводили для снятия тяговых характеристик на всех позициях контроллера и параметров электрической передачи мощности. Кроме того, определяли расход топлива дизелем при работе под нагрузкой и на холостом ходу, а также проверяли соответствие полученных технико-экономических показателей локомотива заявленным заводом-изготовителем. Снимали тяговые характеристики при экспериментальных поездках по кольцевому пути Научно-испытательного центра ВНИИЖТа (ст. Щербинка). В качестве нагрузки тепловоза использовали состав из груженых полувагонов массой до 3000 т и электровоз серии ВЛ80С, который, при необходимости, чтобы реализовать нужные скоростные режимы, создавал дополнительное сопротивление движению включением электрического торможения. Полученные тяговые характеристики представлены на рис. 1. В интервале скоростей движения 0 — 13 км/ч на 8-й позиции контроллера исследуемый локомотив реализует касательную силу тяги, равную 600 кН (75 кН на одну колесную пару). При продолжительной скорости движения 18,7 км/ч продолжительная сила тяги составляет 454 кН (56,75 кН на одну колесную пару). Это достаточно высокие показатели. Для сравнения надо отметить, что для таких тепловозов, как 2ТЭ10 и 2ТЭ116, максимальная сила тяги, реализуемая одной колесной парой, равна 66,4 кН, а продолжительная — 41,3. В ходе испытаний установили, что значения касательной силы тяги в диапазоне скоростей от 0 до 18 — 25 км/ч для 5 — 8-й позиций контроллера без подачи песка могут быть реализованы только на чистых и сухих рельсах. Даже при незначительном увлажнении рабочих поверхностей рельсов касательная сила тяги на отмеченных позициях без подачи песка уменьшалась по сравнению с данными, приведенными на рис. 1. 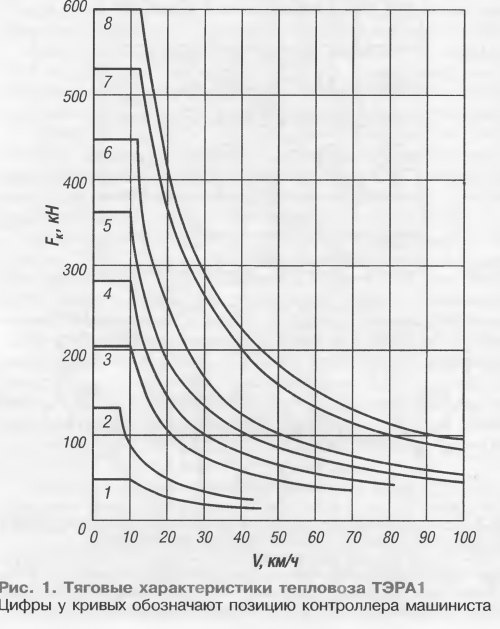 Однако сила тяги реализовывалась всегда устойчиво. Боксования колесных пар в общепринятом понимании этого термина (когда происходят резкие изменения тока якоря тягового двигателя, частоты вращения и касательной силы тяги приводимой им колесной пары) не наблюдали. Это объясняется тем, что микропроцессорная система управления локомотивом непрерывно контролирует условия сцепления и в случае его ухудшения соответственно ограничивает ток тягового генератора. Зависимости выпрямленного тока тягового генератора от скорости движения (которые условно можно назвать «токовые характеристики») представлены на рис. 2. Тяговые двигатели опытного локомотива работают только в режиме полного поля. При этом полное использование мощности дизеля на тягу поезда в заданном диапазоне скоростей движения обеспечивается следующими особенностями тепловоза. Во-первых, на статоре тягового синхронного генератора находятся две одинаковые трехфазные обмотки, каждая из которых подключена к отдельному выпрямительному мосту. Во-вторых, при следовании локомотива со скоростями до 40 — 45 км/ч мосты соединяются параллельно, а при больших скоростях — последовательно. Так как режим возбуждения тяговых двигателей не изменяется, то токовые характеристики практически повторяют форму тяговых (см. рис. 1). Отсутствие бросков тока, обычно возникающих при изменении режима возбуждения электродвигателей, улучшает условия их работы. Кроме того, при этом значительно увеличивается диапазон скоростей движения тепловоза, в котором токи якорей тяговых двигателей имеют малую величину. В результате повышается к.п.д. электрической передачи и тепловоза в целом. Для иллюстрации приведем такой пример. В диапазоне скоростей движения от 40 до 80 км/ч на 8-й позиции контроллера суммарный ток якорей тяговых двигателей изменяется от 4508 до 2730 А, что составляет 55 — 34 % от его продолжительного значения. В то же время, при традиционном регулировании работы электродвигателей с использованием режимов ослабленного поля минимальное значение их суммарного тока не бывает менее 65 — 70 % от продолжительного значения. 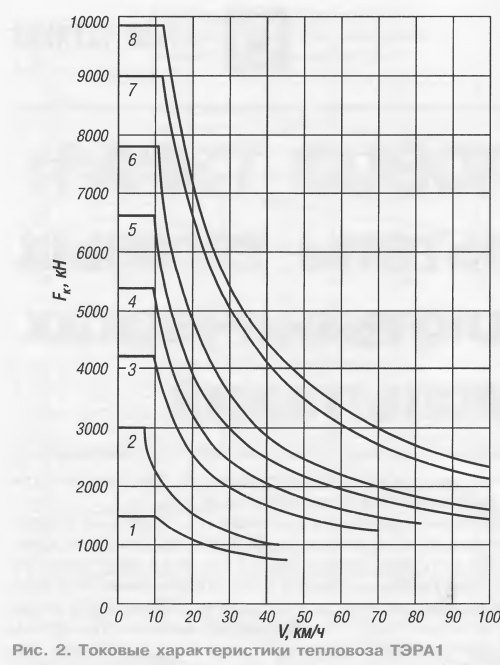 При испытаниях тщательно исследовали переходные процессы, протекающие в электрической передаче локомотива в момент изменения схемы соединения выпрямительных мостов. Прямой переход (с параллельного соединения выпрямителей на последовательное) происходит на 8-й позиции контроллера при скорости движения примерно 45 км/ч. Напряжение Ur до и после перехода не изменяется (если при этом ускорение локомотива незначительно), в то время как фазное напряжение тягового генератора после перехода уменьшается в 2 раза. В момент перехода мощность тягового генератора и касательная сила тяги тепловоза за время около 1 с уменьшаются в 5 — 6 раз, а затем плавно в течение приблизительно 26 с практически по экспоненте восстанавливаются до первоначальных значений. Так как в опытных поездках скорость движения тепловоза в процессе перехода повышалась от 45 (момент начала перехода) до 50 км/ч (момент окончания переходного процесса), то и напряжение Ur увеличивалось соответственно от 647 до 693 В. Обратный переход (с последовательного соединения выпрямителей на параллельное) на 8-й позиции контроллера происходит при скорости 41 — 43 км/ч. 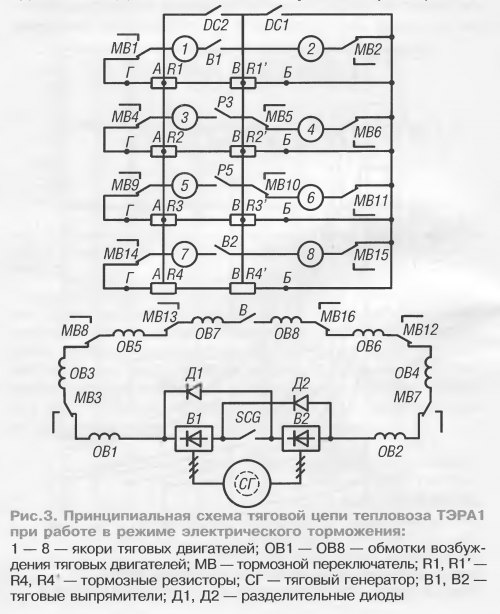 При этом первоначальные значения мощности тягового генератора и касательной силы тяги тепловоза восстанавливаются быстрее — за 11 с. Когда выполняли тяговые испытания с поездами массой от 1000 до 8000 т, динамических реакций в протекании прямых и обратных переходов не отмечали. Это объясняется соответствующим качеством используемых алгоритмов процессов управления переходами. Прямые и обратные переходы сопровождаются значительными изменениями параметров передачи мощности. Удовлетворительное качество протекания переходных процессов может быть обеспечено только микропроцессором. Внешние характеристики тягового генератора по позициям контроллера отличаются значительным диапазоном изменения тока. Так, на 8-й позиции контроллера выпрямленный ток тягового генератора изменяется от 9840 (режим трогания) до 2340 А (движение со скоростью 100 км/ч). Такой диапазон тока объясняется не какими-то особыми качествами тягового генератора, а является результатом переключения выпрямительных мостов. В частности, при токе от 9840 до 4500 А мосты соединены параллельно и токе от 4500 до 2340 А — последовательно. Одним из параметров, характеризующих качество электрической передачи, является неравномерность токораспределения по тяговым двигателям, определяемая отклонением их токов от среднего значения. Как известно, при работе в режиме полного поля разброс значений токов якорей электродвигателей обусловлен отклонениями их электромеханических характеристик и неодинаковыми диаметрами бандажей (в пределах разрешенного допуска под тепловоз разрешается подкатывать колесные пары с разницей диаметров бандажей не более 12 мм). 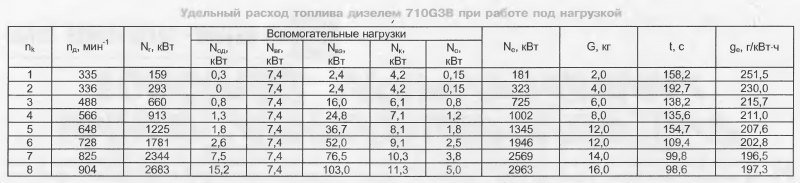 При этом неравномерность токораспределения по тяговым двигателям в режиме полного поля для тепловозов, которые эксплуатируются на магистралях МПС, не должна превышать ±4 %. На основании полученных данных можно сделать вывод, что тепловоз ТЭРА1 удовлетворяет требованиям, предъявляемым к подобным локомотивам на российских дорогах в части обеспечения заданной неравномерности токораспределения по электродвигателям. Тепловоз ТЭРА1 оборудован электрическим тормозом, действующим до полной остановки Для перевода тяговых двигателей в режим электрического торможения их обмотки возбуждения отключают от якорей, соединяют последовательно и подключают к выпрямительной установке, а сами якоря соединяют с тормозными резисторами. Тормозная сила регулируется бесступенчато. Для этого машинист вызывает на дисплей микропроцессорной системы управления тепловозом параметр, представляющий собой величину реализуемой тормозной силы, выраженную в процентах от ее максимального значения и обозначаемую «Brk Req». Затем с помощью главной рукоятки контроллера он устанавливает необходимую, по его мнению, в данных условиях тормозную силу заданием соответствующей величины указанного параметра. После сбора тормозной схемы (рис. 3) компьютер обеспечивает реализацию заданной тормозной силы изменением тока, протекающего по обмоткам возбуждения тяговых двигателей. Переключатели ступеней торможения (контакторы) DC1 и DC2 позволяют увеличить тормозную силу тепловоза при низких (менее 25 — 30 км/ч) скоростях движения. Если его скорость при торможении превышает 30 км/ч, то оба контактора выключены и тормозной ток каждой группы тяговых двигателей протекает по двум тормозным резисторам, соединенным последовательно (для двигателей, например, первого и второго, это будут резисторы R1 и R1'). При снижении скорости первым включается контактор DC1 и сопротивление каждой из групп тормозных резисторов уменьшается примерно на 25 %, а тормозной ток и, следовательно, тормозная сила соответственно увеличиваются. Затем контактор DC1 отключается и включается контактор DC2. Теперь сопротивление каждой из групп тормозных резисторов уменьшается примерно на 50 %. И, наконец, при включенном DC2 включается DC1. В этом случае сопротивление тормозных резисторов уменьшается на 75 %. Как следует из анализа тормозных характеристик тепловоза ТЭРА1, полученных при реализации максимальной тормозной силы, а также для «Brk Req» = 80 и «Вгк Req» = 40 %, скорость движения, при которой начинаются переключения контакторов DC1 и DC2, снижается с уменьшением реализуемой тормозной силы. Если она равна максимальной (параметр «Brk Req» = 100 %), эта скорость составляет около 39 км/ч, при «Brk Req» = 80 % — 33 км/ч, а при «Вгк Req» = 40 % — примерно 9 км/ч. Согласно полученным данным, были определены сопротивления участков тормозных резисторов, которые оказались следующими: Rbb~ 0,45, Rab « 0,91, RfB « 1,82 и Rab « 1,36 Ом. Необходимо отметить, что у тормозных характеристик отсутствует зона ограничения тормозной силы по коммутации тяговых двигателей, что может быть объяснено их хорошей коммутационной устойчивостью. Принятая схема соединения двигателей при торможении — по два последовательно — позволяет уменьшить число силовых контактов коммутационных аппаратов, используемых при электрическом торможении. Но при таком соединении тяговых двигателей в определенных условиях сцепления у некоторых колесных пар возможен юз с прекращением их вращения. Однако наличие совершенной системы обнаружения юза практически устраняет возможность возникновения этого явления. Все представленные опытные характеристики максимально совпадают с заявленными заводом-изготовителем. дельный расход топлива дизелем типа 710G3B тепловоза ТЭРА1 определяли весовым способом. При этом фиксировали время потребления предварительно заданного количества топлива. Вес контрольного количества топлива с учетом реализуемой в данном опыте мощности дизеля задавался таким, чтобы время его расходования было равно 100 — 200 с. Во всех опытах дизель-генератор нагружался на собственные тормозные резисторы. Во время испытаний регистрировали следующие параметры работы дизель-генератора: позицию главной рукоятки контроллера (пк), частоту вращения коленчатого вала (пд, мин"1), мощность на зажимах тягового генератора (Nr, кВт), время расходования контрольного количества топлива (t, с), температуру теплоносителей системы охлаждения дизеля (воды и масла), режим работы каждого из трех вентиляторов системы охлаждения дизеля (остановлен, работа с половинной или полной частотой вращения). Кроме того, контролировали затраты мощности на вспомогательные нагрузки NBH (вспомогательный генератор — Мвг, вентилятор системы охлаждения электрооборудования — Мвэ, тормозной компрессор — NK, вентиляторы системы охлаждения дизеля — Мод, вентилятор отсоса пыли из инерционного фильтра — N0). Полученные усредненные экспериментально-расчетные данные приведены в таблице. При работе дизеля с номинальной мощностью (3060 кВт) средний удельный расход топлива равен 197,3 г/кВт ч (заявлено 197,7 г/кВт-ч), а при работе по тепловозной характеристике с мощностью равной 60 % — 203,2 г/кВт ч. Часовой расход топлива на холостом ходу на нулевой позиции контроллера — при частоте вращения коленчатого вала, равной 196 мин-1 — составил 11,5 кг/ч (заявлено 11,3 кг/ч). Представленные данные свидетельствуют о высокой экономичности двухтактного дизеля 710G3B на тепловозе ТЭРА1 Помимо тягово-теплотехнических испытаний тепловозов ТЭРА1, специалисты ВНИИЖТа в полном объеме провели и другие исследования, предусмотренные программой приемочных испытаний новых локомотивов. Результаты показали, что экспериментальные тепловозы соответствуют требованиям, предъявляемым к подвижному составу нормативно-техническими документами, и могут быть использованы по назначению на сети железных дорог Российской Федерации. Кандидаты технических наук В.А. АЗАРЕНКО, И.П. АНИКИЕВ, А.Н. КОРНЕВ, д-р. техн. наук Е.Е. КОССОВ, инж. В.В. ИВАКИН, сотрудники ВНИИЖТа, инж. И.Е. ПРОВАТОРОВ, заместитель главного конструктора ОАО «Людиновотепловоз» |
|
|
Цитировать 14 |
|
|
#2 (ссылка) |
|
Робот

Регистрация: 05.05.2009
Сообщений: 1,496
Поблагодарил: 0 раз(а)
Поблагодарили 82 раз(а)
Фотоальбомы:
не добавлял
Репутация: 0
|
Тема: Тема перенесена |
|
|
Цитировать 0 |
|
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| Знакомьтесь: тепловоз ТЭРА1 | Admin | xx2 | 0 | 08.07.2011 21:30 |
| Тепловоз ЧМЭЗП-5188: результаты опытной эксплуатации | Admin | xx2 | 0 | 24.06.2011 19:05 |
| ПР 32.185-2001 Правила по метрологии. Типовая программа обучения калибровщиков средств измерения теплотехнических величин на федеральном железнодорожном транспорте | Admin | ОСТы | 0 | 04.05.2011 06:56 |
| ОСТ 32.55-96 Система испытаний подвижного состава. Требования к составу, содержанию, оформлению и порядку разработки программ и методик испытаний и аттестации методик испытаний | Admin | ОСТы | 0 | 03.05.2011 14:38 |
| ОСТ 32.54-96 Система испытаний подвижного состава. Организация и порядок проведения приемочных и сертификационных испытаний вагонной продукции | Admin | ОСТы | 0 | 03.05.2011 14:35 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| , , , , , , , , , , , |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|










