



|
|
|
|||||||
|
|
#1 (ссылка) |
|
Crow indian







Регистрация: 21.02.2009
Возраст: 41
Сообщений: 30,426
Поблагодарил: 398 раз(а)
Поблагодарили 6046 раз(а)
Фотоальбомы:
2624 фото
Записей в дневнике: 904
Репутация: 126141
|
Тема: [01-2024] Перспективы применения робототехнических комплексов для обследования инфраструктуры железных дорогПерспективы применения робототехнических комплексов для обследования инфраструктуры железных дорог РАДЬКО А.С., Научно-исследовательский институт (военно-системных исследований МТО ВС РФ) BA МТО, научный сотрудник Железнодорожный транспорт является ведущей отраслью дорожно-транспортного комплекса Российской Федерации, эффективность использования которого находится в прямой зависимости от технического состояния его инфраструктуры. Чрезвычайные ситуации (ЧС) природно-климатического или техногенного характера либо результат диверсий террористических групп могут стать причиной ее повреждения или разрушения. Основным способом обследования инфраструктуры железных дорог является применение различных комплексов диагностики. Однако при ЧС в труднодоступной местности осмотр участка может быть ограничен. При таком сценарии для повышения эффективности используют беспилотные летательные аппараты (БПЛА) [1, 2, 3]. При помощи БПЛА самолетного типа может быть оперативно получена следующая информация:
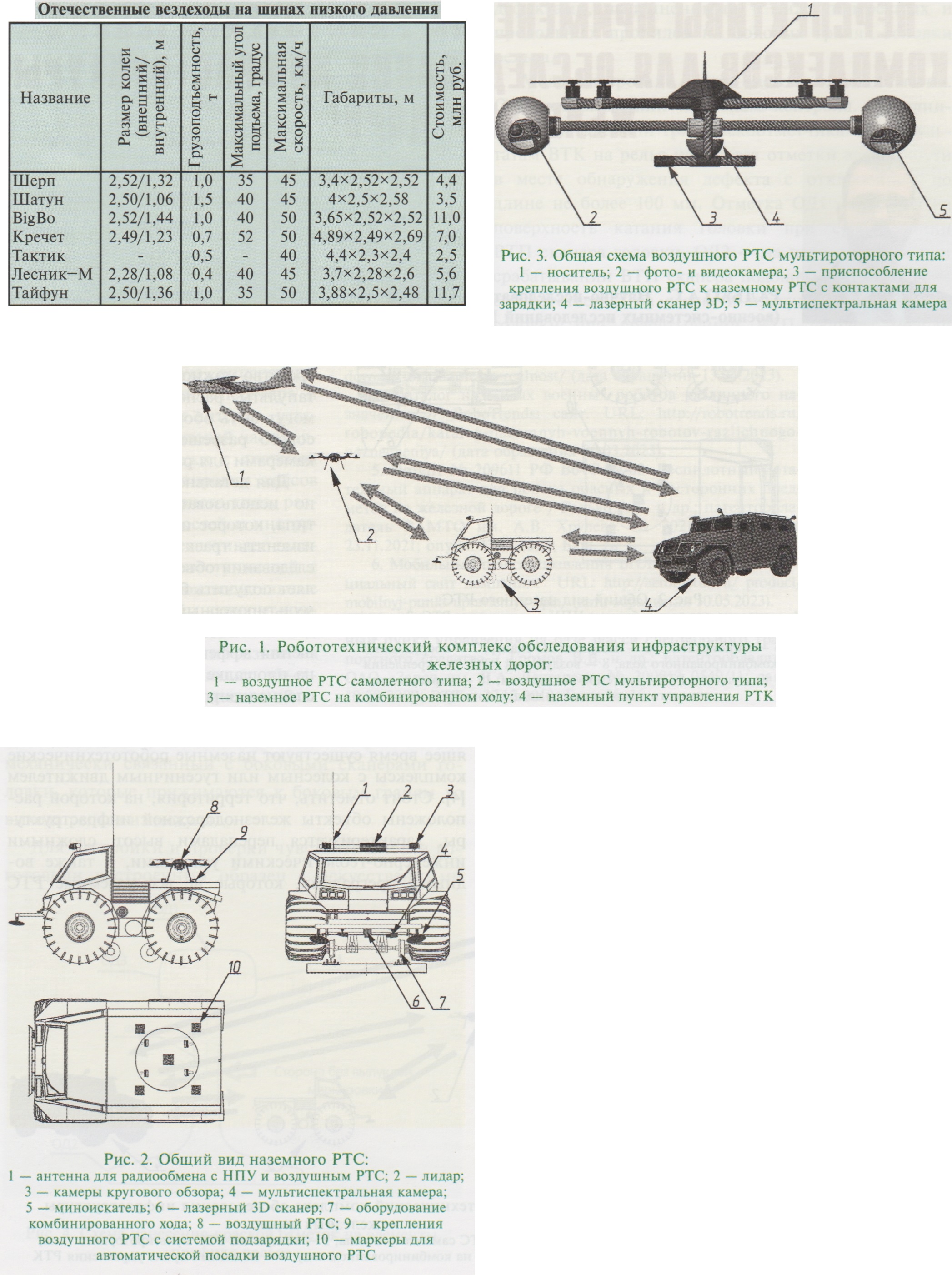 Однако применение БПЛА самолетного типа зависит от природно-климатических, территориальных и иных условий, которые не позволяют собрать полную и достоверную информацию о состоянии инфраструктуры железных дорог. Становится очевидно, что для решения возникшей проблемы необходим специализированный робототехнический комплекс (РТК), включающий в себя наземное и воздушное робототехнические средства (РТС), а также мобильный наземный пункт управления (НПУ). Общая структурная схема предлагаемого комплекса представлена на рис. 1. Совместное применение воздушного и наземного РТС при обследовании участков и объектов позволит повысить эффективность обоих за счет взаимной корректировки плана миссии при получении дополнительной информации, например, наземное средство может в автоматическом режиме изменить маршрут передвижения. Использование воздушного РТС в режиме ретранслятора позволит увеличить радиус действия наземного за счет передачи и обработки данных в НПУ. Рассмотрим подробнее состав комплекса. В настоящее время существуют наземные робототехнические комплексы с колесным или гусеничным движителем [4]. Стоит отметить, что территория, на которой расположены объекты железнодорожной инфраструктуры, характеризуется перепадами высот, сложными инженерно-геологическими условиями, а также водными преградами, которые не все наземные РТС могут преодолеть либо скорость их передвижения будет ограничена. В связи с этим наземное РТС должно обладать автономностью, высокой проходимостью, используя шины со сверхнизким давлением, и оборудованием для перемещения по железнодорожному пути. Комбинированный тип ходовой части позволяет преодолевать пересеченную местность, верхнее строение пути, водные преграды. В таблице представлены отечественные вездеходы на шинах низкого давления. Переоборудование вездехода с шинами сверхнизкого давления в робототехническое средство с применением современных технологий позволит с минимальными ограничениями выполнять обследование участка с необходимой детализацией. Для реализации наземного РТС и выбора прототипа его базы рассмотрим существующие вездеходы на колесах сверхнизкого давления. Исходя из характеристик приведенной в таблице техники, можно сделать вывод, что наиболее оптимальным прототипом может быть «Шерп», который обладает соответствующей базой по ширине колеи и свободно передвигается по железнодорожному пути. Помимо прочего он имеет относительно низкую стоимость, высокую проходимость, достаточную грузоподъемность для размещения оборудования. На вездеход необходимо установить системы управления и связи с наземным НПУ, камеры кругового обзора, лазерные лидары, систему навигации и позиционирования в пространстве, а также оборудование с гидравлическим управлением комбинированного хода. Для обследования железнодорожной инфраструктуры предлагается также использовать фото- и видеокамеры, обеспечивающие обзор верхнего строения пути, а также полосы отвода; мультиспектральную камеру и лазерный 3D сканер, которые позволят создать объемную модель поврежденного объекта, что повысит эффективность опенки ущерба; миноискатель для обнаружения минно-взрывных устройств. Общая схема наземного робототехнического средства представлена на рис. 2. При обзорном формате воздушного обследования железнодорожной инфраструктуры актуально применять воздушные РТС самолетного типа, которые обладают большой дальностью полета, могут определить общее состояние пути и указать на объекты, которые требуют более детального осмотра. Данное средство можно запускать со специализированной катапульты, расположенной на НПУ. Воздушные РТС могут быть оборудованы фото- и видеокамерами высокого разрешения, а также мультиспектральными камерами для работы в сложных условиях [1]. Для детального воздушного обследования актуально использовать воздушное РТС мультироторного типа, которое имеет небольшие размеры, может легко изменять траекторию движения для безопасного обследования объекта с различных ракурсов, что позволяет получить более подробную информацию. Однако мультироторный тип не обладает большой дальностью действия из-за небольшого времени полета. Для повышения эффективности применения воздушного РТС, на площадке наземного РТС предлагается установить специализированные крепления для фиксации аппарата и подзарядки его аккумулятора. Оснащение данного средства фото- и видеокамерами, лазерным 3D сканером и мультиспектральной камерой, которая необходима для работы в темное время суток и при сильном задымлении, поможет обследовать и оценивать объемы повреждения [5]. На рис. 3 представлена общая схема воздушного РТС мультироторного типа. Особенностью данного воздушного РТС является специализированный модуль, представляющий собой штангу, на которой закреплены модули полезной нагрузки, которые могут оперативно меняться в зависимости от выполняемых задач. Благодаря специализированной штанге можно увеличить площадь участка, попадающего в объективы камер, что позволяет обследовать объекты на одной траектории с разных ракурсов. Также целесообразно рассмотреть наземный пункт управления, рассчитанный на длительную и автономную работу в условиях бездорожья, удаленности месторасположения, при действии неблагоприятных погодных и климатических факторов [6]. 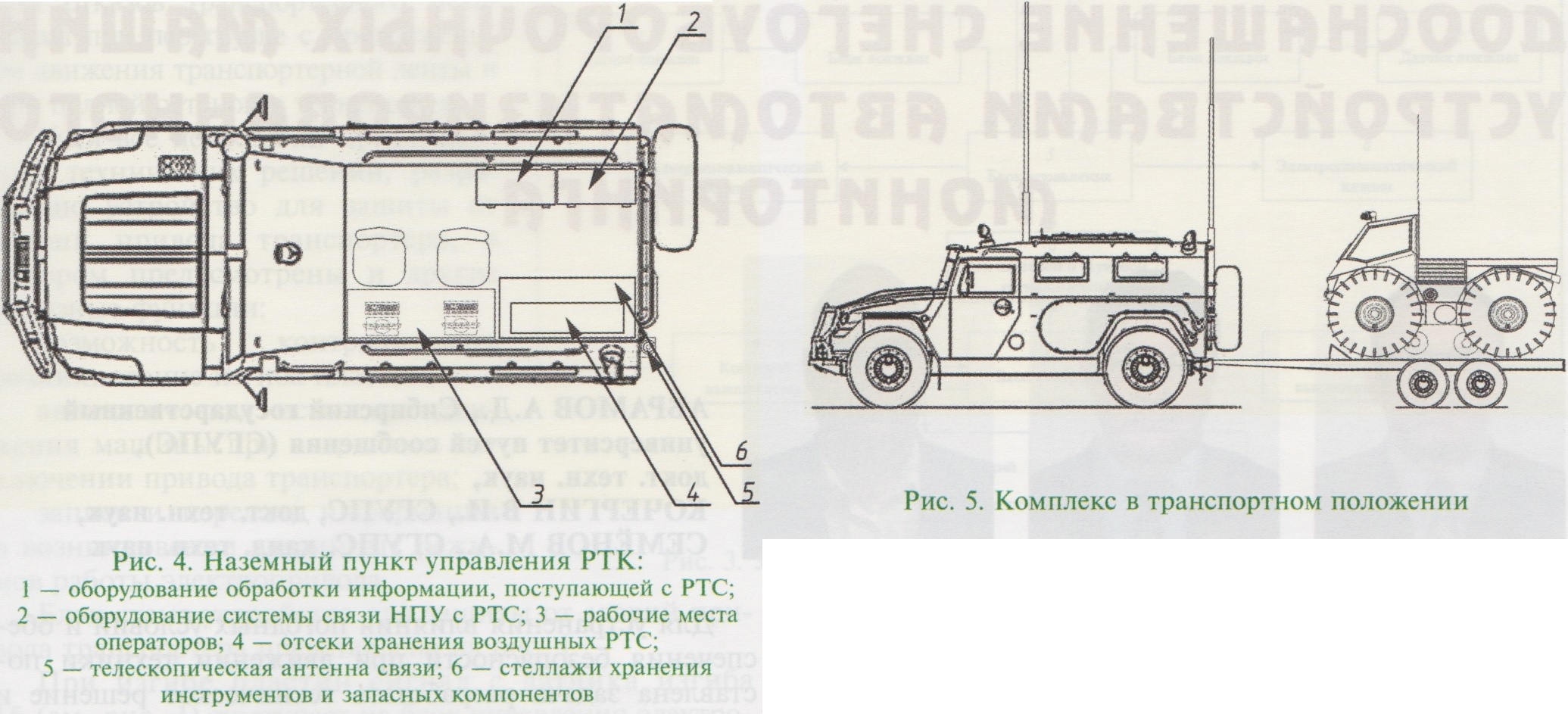 В автомобиле обустроены рабочие места для операторов, оснащенные мониторами. Управление производится через специализированную аппаратуру, которая обеспечивает взаимодействие оператора и РТС. Пульт управления подключен к антенне, установленной на выдвижной мачте. В грузовой части автомобиля также расположены стеллажи с системой крепления для безопасной транспортировки кейсов комплекса самолетного и мультироторного типа, различных дополнительных принадлежностей и инструментов. Автономную работу НПУ обеспечивает генератор. Для обработки информации, поступающей с РТС в кузове расположены высокопроизводительные компьютеры [7]. На рис. 4 представлен вариант компоновки наземного пункта управления РТК. Шины наземного РТС имеют высокий износ на асфальтовых дорогах и острых выступающих объектах. Наземный пункт управления РТК должен обладать возможностью транспортировки РТС до места проведения обследования. На рис. 5 представлен вариант положения комплекса при транспортировании. Использование данного комплекса позволит оперативно и детально проводить обследование верхнего строения пути, земляного полотна, мостов, тоннелей, станций, определять наличие разрушений и их объемы. Применение наземного РТС даст возможность обнаруживать минно-взрывные устройства, что обеспечит безопасность работников при оперативном восстановлении движения на поврежденном участке. Комплекс также может быть применен для мониторинга состояния железнодорожной инфраструктуры и выявления фактов внешнего воздействия в режиме реального времени. Список источников1. Дрещинский В.А., Радько А.С., Беспилотник прокладывает путь // Материально-техническое обеспечение ВС РФ. 2023. № 2. С 66—74. URL: https://mto.ric.mil.ru/upioad/ sitel93/CX9K10jiTw.pdf. 2. Бабакехян К.В., Щербаков А.Ф., Моржаков В.Г., Применение беспилотных летательных аппаратов для технической разведки железных дорог // Военная мысль. 2021. № 11. С. 80-86. 3. Дроны на железных дорогах. Ожидание или реальность? // DJI. Гид покупателя: сайт. 2022. 16 февр. URL: https://djimsk.ru/guides/2022/02/16/drony-na-zheleznyh-dorogah-ozhidanie-vs-realnost/ (дата обращения 13.04.2023). 4. Каталог наземных военных роботов различного назначения // RoboTrends: сайт. URL: http://robotrends.ru/ robopedia/katalog-nazemnyh-voennyh-robotov-razlichnogo-naznacheniya/ (дата обращения 20.03.2023). 5. Патент № 209611 РФ В64С 39/02. Беспилотный летательный аппарат для поиска опасных и посторонних предметов на железной дороге / Радько А.С. и др.; патентообладатель ВАМТО им. А.В. Хрулева. № 2021134412; заявл. 23.11.2021; опубл. 17.03.2022; Бюл. № 8. 6. Мобильный пункт управления БПЛА // Aeromotus: официальный сайт компании. URL: http://aeromotus.ru/ product/ mobilnyj-punkt-upravleniya-bpla/ (дата обращения 30.05.2023). 7. Патент № 2407658 РФ В60Р 9/00, В60Р 3/14. Наземный пункт управления на базе шасси специального транспортного средства / Громов В.В. и др.; патентообладатель ОАО «Завод им. В.А. Дегтярева. № 200913 0549/11; заявл. 10.08.2009; опубл. 27.12.2010; Бюл. № 36. |
|
|
Цитировать 14 |
| Ответить в этой теме Перейти в раздел этой темы Translate to English |
| Возможно вас заинтересует информация по следующим меткам (темам): |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|










