| |       |
Лекция 6. ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИЧЕСКИЕ Системы
Система автоматического считывания
информации с движущегося подвижного состава используется в рамках
информационно-управляющей системы и предназначена для автоматической фиксации
подвижного состава (локомотивов, грузовых и пассажирских вагонов, вагонов-механизмов)
через заранее выбранные пункты считывания.
Автоматическая идентификация заменяет
ручное и визуальное натурное списывание подвижного состава. Система
обеспечивает качественное улучшение сведений о подвижных объектах в части
достоверности информации и оперативности ее доставки пользователям на всех
уровнях управления. Система функционирует в реальном масштабе времени.
Развертывание системы имеет целью организацию и ведение достоверной оперативно
контролируемой БД на уровне ИВЦ железных дорог и отрасли в целом.
Для достижения поставленной цели весь
подвижной состав оборудуется кодовыми бортовыми датчиками (КБД), несущими
информацию о каждом подвижном объекте, а в выбранных точках полигона сети
устанавливаются пункты считывания, включающие в себя напольные считывающие
устройства (НСУ), которые автоматически снимают информацию с укреплённых на
подвижном составе кодовых датчиков и передают ее к месту ведения БД .
На рис. 6.1
показана структура систем автоматического считывания номеров вагонов, где: ЭП –
электронная педаль; СУ – считывающее устройство; СО – счётчик осей; СДС – схема
дешифрации сигналов; Н – накопитель; К – кодер; П – передатчик; ЛС – линия
связи.

Рис. 6.1. Структура систем автоматического считывания
номеров
Идея считывания
заключается в следующем. На вагоне укрепляют датчик ВД, несущий информацию о
номере в закодированном виде. При проходе поезда по контрольному участку эта
информация считывается и дешифрируется. Процесс считывания активизируется
специальными устройствами контроля приближения поезда, в качестве которых
обычно применяют короткие РЦ наложения (электронные педали) или электромагнитные
точечные датчики. В процессе считывания выполняется счёт осей вагонов. Схемы
счётчиков осей вагонов позволяют устанавливать направления движения, определяют
порядок обработки считанных сигналов.
Технически и
организационно проблема считывания номеров вагонов достаточно сложна,
поскольку: считывание необходимо проводить без снижения скорости поезда,
которая может достигать 150-160 км/ч; содержание и качество считанной
информации не должно зависеть от направления движения поезда; требуется
выявлять вагоны с поврежденными или отсутствующими датчиками; датчики должны
быть простыми в настройке, легкосъемными, приемлемыми для любых типов вагонов,
долговечными, а также работать без источника питания; достоверность считывания
не должна ухудшаться при плохой видимости, загрязнениях датчика, а также при
изменениях климатических условий.
Сочетать оптимальное
решение этих задач в одном устройстве достаточно трудно. Известны системы
считывания, основанные на различных физических принципах взаимодействия
датчиков и приемников устройств считывания, среди которых можно выделить
оптические, акустические, радиоактивные, магнитные, электромагнитные,
индуктивные, радиочастотные и телевизионные [18, 36].
В настоящее время оборудуется датчиками
весь подвижной состав сети железных дорог и
пункты считывания, сопряженные каналами передачи информации с центрами
обработки данных. Система идентификации предназначается для решения следующего
набора основных прикладных задач:
1. система полностью берет на себя функции
контроля фактического состава поездов, высвобождает контингент сотрудников на
станциях, занятых списыванием и контролем составов поездов;
2. создает базу реализации безбумажных информационных
технологий;
3. решает проблему отчетности
информационных структур по вагонным паркам, снимая имеющиеся противоречия и
автоматизируя взаиморасчеты за пользование вагонами между железнодорожными
администрациями государств СНГ и стран Балтии – участницами Соглашения о совместном
пользовании грузовыми вагонами;
4. обеспечивает информационный сервис в
транзитных перевозках и в обслуживании отправителей и получателей грузов во
внутреннем и межгосударственном сообщении
железных дорог;
5. создаёт надёжную информационную базу
для перехода к системе ремонтов и технического содержания грузового вагонного
парка по нормативным фактически выполненного пробега;
6. обеспечивает достоверность и
оперативность ведущихся АСУ железнодорожного транспорта в составе комплекса «ДИСПАРК»
моделей дислокации подвижного состава на элементах сети железных дорог, повышая
за счёт этого реальную эффективность решаемых в составе АСУ задач.
В
настоящее время на отечественных железных дорогах наибольшее распространение
получили системы считывания номеров вагонов
типа «Пальма» и ЛОТОС.
В
зависимости от решаемой технологической задачи пункт считывания системы
автоматической идентификации может располагаться в следующих местах:
1.
На входах станций между входным светофором и
первой стрелкой.
2.
На выходах станций между последней стрелкой и
указателем «Граница станции».
3.
На контрольных пунктах локомотивных или
вагонных депо.
Схема
сбора и передачи информации для пункта считывания имеет следующий вид.
Информация с каждого пункта через низкотемпературный модем передается на
концентратор информации системы автоматической идентификации, расположенный на
станции (как правило, в Доме связи, товарной конторе и т.п.). Концентратор
информации формирует стандартное сообщение и передает его по системе передачи данных
(СПД) пользователям.
Сервер станции обеспечивает накопление
нормативной информации о движении поездов, обработку считанной информации,
протоколирование выполненной станцией поездной работы с детализацией до времени
прибытия и отправления поезда и номера приёмоотправочного пути, распределение и
вывод соответствующей информации на АРМ пользователей.
Система обеспечивает: считывание данных
с КБД локомотива или вагона и учёт числа осей единицы подвижного состава при
любом направлении движения; надёжное считывание данных при скорости движения от
0 до 140 км/ч (допустимая вероятность возникновения одной обнаруживаемой
средствами системы ошибки не более 0,000001); распознавание и локализацию
сведений о тех подвижных единицах, бортовой прибор на которых неисправен или
отсутствует; работу в диапазоне температур от +70 до –500С в любых
климатических условиях; невосприимчивость к загрязнения, пыли от тормозных
колодок, льду, снегу, туману, пару и дыму, воздействию посторонних
электромагнитных полей. Кодовый датчик работает без источника автономного
электроснабжения. Система не должна создавать никаких помех в нормальной
эксплутационной работе, экологических проблем пассажирам и персоналу. Кодовые
датчики системы адаптированы к условиям выполнения пропарки и промывки цистерн,
к методам оттаивания сыпучих смерзаемых грузов.
Элементами системы являются КБД, стационарное напольное
устройство считывания закодированных в датчике сведений НСУ, средства передачи
считанных данных в центр обработки с использованием вычислительной сети АСУ
железнодорожного транспорта. Сообщение о факте проследования подвижного состава
через пункт считывания содержит следующий перечень обязательных данных: код
пункта считывания, направление следования, время проследования,
идентификационные данные подвижных единиц, данные о проследовавших подвижных
единицах, у которых КБД неисправен или отсутствует.
Кодовый бортовой
датчик КБД крепится на каждом подвижном средстве и представляет собой пассивный
элемент, включающий полосковую антенну, модулятор волнового сопротивления и
интегральную микросхему функционального преобразователя, которая содержит
идентификационный код подвижного объекта. При прохождении мимо пункта
считывания СВЧ–излучение от облучающей считывающей аппаратуры поглощается КБД и
отражается обратно в облучающую считывающую аппаратуру в модулированном виде,
где декодируются и затем передается в систему передачи данных.
Датчик СВЧ
сигналы не регулирует, а модулирует
отражаемые сигналы, которые поступают от НСУ – стационарно
устанавливаемого на расстоянии в несколько метров от железнодорожного пути в
точках контроля движения поездов. Для выполнения своих функций КБД имеет полосковую
антенну, модулятор волнового сопротивления и
интегральную микросхему функционального преобразователя кода с
постоянным запоминающим устройством. НСУ передает в направлении КБД сигналы в
диапазоне сверхвысоких частот, КБД поглощает часть этих сигналов и отражает поступающие СВЧ–
облучения обратно в НСУ где отраженные
радиосигналы декодируются. Расшифрованная информация по каналам передачи данных
доставляется обрабатывающей ЭВМ.
НСУ излучает СВЧ-колебания лишь в периоды, когда РЦ БУ, к которой “привязан”
излучатель занята подвижным составом. При отсутствии подвижного состава НСУ находится в дежурном состоянии.
Память НСУ имеет емкость на 512 КБД.
После прохода поезда блок накопленной информации по каналу связи
передается в обрабатывающий компьютер
ИВЦ.
Программирование КБД на конкретную
информацию можно выполнять с помощью специальных устройств-программаторов. За
срок эксплуатации данные КБД можно изменить до 5 раз. Расчетный срок эксплуатации
КБД не менее 10 лет.
Запоминающее устройство КБД содержит
128 бит информации. Из них 26 бит
используется для технологических целей (контроль ошибок, расходование
информационного кадра, определение формата данных защита от
несанкционированного дублирования датчиков), а 102 бита образуют содержательную область памяти общего назначения.
Для датчиков КБД принята и должна строго соблюдаться следующая
схема использования информационных полей - единый для сети железных дорог колеи
1520 мм идентификатор подвижной железнодорожной единицы (вагон, секция
локомотива, механизм или устройство на
железнодорожном ходу), состоящий из 12 десятичных цифровых разрядов, записанных
в датчике двоичными тетрадами (48 бит: 8 бит-условный режим обмена, 8 бит –код
государства собственника, 32 бита –8 –значный номер подвижной железнодорожной
единицы);
Идентификатор
представляет собой пассивный режекторный фильтр, выполненный с учетом
используемого для считывания сверхвысокочастотного спектра в виде отрезка
прямоугольного волновода, одна сторона которого заканчивается короткозамкнутой
стенкой, а другая переходит в приемопередающую рупорную антенну. На широких стенках
волновода размещены настроенные на определенные частоты в соответствии с номером
подвижного объекта резонаторы. Во избежание попадания внутрь идентификатора
влаги и грязи, что может нарушить настройку резонаторов и исключить нормальную
работу системы, открытый конец антенны закрыт радиопрозрачной крышкой.
Идентификатор
содержит 16 симметрично расположенных резонаторов, что позволяет координировать
8 десятичных знаков номера любого подвижного объекта, и размещается между
тележками подвижного объекта на его продольной оси таким образом, чтобы раскрыв
антенны был направлен в сторону колеи.
Напольное считывающее
устройство работает в сантиметровом диапазоне радиоволн, причем излучаемая в
открытое пространство мощность сигнала опроса идентификаторов не превышает
единиц милливатта. Оно состоит из антенного блока, приемопередатчика,
радиоэлектронного блока, формирователя сообщения о прошедшем поезде и блока
питания.
Одной из подсистем автоматизации управления
на ж.-д. транспорте является система управления движением поездов [1].
Особенности движения рельсового транспорта предопределяют три основные
составные части процесса движения: диспетчерское руководство движением в целом
на участке, разграничение попутных и встречных поездов и ведение поезда
(рис.6.2). Все три составляющих процесса образуют взаимосвязанный комплекс,
определяющий движение на участке и поэтому подлежащий автоматизации.
Автоматизированное управление движением
поездов предусматривает решение комплекса задач, определяющих продвижение поездов
по участку, таких, как анализ, контроль и корректировка заданий диспетчером на
основании моделирования различных вариантов режима пропуска поездов с расчетом
их показателей, автоматический выбор оптимального порядка пропуска поездов по
одному или нескольким критериям, выполнение принятых решений по команде
диспетчера, номерной учет продвижения поездов, указание на табло их размещения
на участке, сбор информации об отклонениях в продвижении поездов, отказах
технических средств и составление оперативной отчетности.
Организация
поездным диспетчером (ДНЦ) самого процесса продвижения поездов по участку
ведется при соблюдении требований безопасности с применением технических
средств автоматики разграничения поездов на перегонах (АБ) и станциях (ЭЦ).

Рис. 6.2.Основные задачи по управлению движения поездов
При АБ перегон делят на блок – участки, а на их границах
устанавливают проходные светофоры, показаниями которых управляют сами движущиеся
поезда с помощью аппаратуры размещенной в релейных шкафах. С целью повышения
пропускной способности на перегонах, при безусловном выполнении безопасности
движения поездов, применяют различные системы АБ [17, 19, 36].
При локомотивной
сигнализации (АЛС), применяемой как самостоятельное средство сигнализации,
раздельными пунктами служат границы между блок-участками, а движение
осуществляется по сигналам ЛС . При этом нормальное движение может происходить
только при действующих устройствах на локомотиве [13].
Что касается технической базы устройств
автоматики, то она все время совершенствуется, внедряются новые более
прогрессивные технические решения, повышающие надежность и дающие новые эксплуатационные
качества.
Для определения подвижного состава на
участках пути каждый блок-участок оборудуется РЦ. На рис. 6.3 приведены
схемы поясняющие принцип действия двухзначной системы АБ [17, 19].
На границах
смежных блок - участков, в створе с проходными свето форами устанавливаются
изолирующие стыки. На одном из концов блок - участка 1БУ и 3БУ к рельсам
подключаются источники питания ПБ1, ПБ3. На противоположных концах блок -
участков включаются путевые приемники П1, П3 (реле) а рельсовые нити
железнодорожного пути служат проводниками сигнального тока.
-
Рис. 6.3 Схемы
автоматического управления проходными светофорами
Если блок-участок 1БУ свободен от
подвижной единицы, то ток от путевой батареи ПБ1 через ограничивающий резистор Rо и рельсовые нити будет протекать через обмотку путевого
приемника П1. Реле притянет свой якорь и фронтовым контактом создаст цепь для
включения лампы зеленого огня на светофоре 1 от источника питания с полюсами ²П²
и ²М². Зеленый огонь светофора указывает,
что ограждаемый им блок-участок свободен и рельсы не повреждены [19].
При вступлении поезда на блок-участок
3БУ, ограждаемый светофором 3, РЦ шунтируется его колесными парами, имеющими
очень малое сопротивление. Это приводит к значительному снижению напряжения на
путевом реле П3. Реле отпускает свой якорь и замыкает тыловой контакт. На
светофоре 3 к источнику питания подключается лампа красного огня.
Благодаря горению красного огня на
светофоре 3 въезд второго поезда на занятый блок-участок запрещается, пока он
не освободится от подвижной единицы. Как только блок-участок 3БУ освободится,
напряжение на путевом реле П3 увеличится до напряжения срабатывания и его фронтовыми
контактами на светофоре 3 включится
лампа зеленого огня. В этом и заключается
автоматический съем информации от нахождении поезда на БУ, за счет чего
обеспечивается управление проходными светофорами.
Во многих случаях возникает необходимость
сбора данных, приведение их к удобному для дальнейшей обработки виду и передачи
на более высокий уровень. Такие
задачи решаются и на ж.-д. транспорте в

Рис.
6.4. Автоматизированное рабочее место поездного диспетчера
системах диспетчерского управления (ДЦ) и контроля (ДК) за движением
поездов (рис. 6.4). Централизация управления поездной работой в единых дорожных и региональных центрах (ЦУП) выполняется с
помощью интегрированных многоуровневых управляющих системах.
Автоматизации подлежит технология работы аппарата поездных
диспетчеров, а также технология работы ШЧ по контролю за состоянием устройств,
с возможностью передачи оперативной информации о поездном положении и состоянии
устройств работникам других служб.
Основным назначением ДЦ и ДК является
своевременное обеспечение диспетчерского аппарата ШЧ и отделения дороги полной
и достоверной информацией о показаниях сигналов, положении стрелок, маршрутов
приема и отправления поездов, состоянии устройств и действиях эксплуатационного
штата на станциях и перегонах с целью улучшения диспетчерского руководства
эксплуатационной и оперативной работой [28,30].
Устройства ДК представляет поездному
диспетчеру информацию о установленном направлении движения (на однопутных
перегонах оборудованных АБ), занятость БУ, главных и приёмо-отправочных путей
на промежуточных станциях, а также повторяют показания входных и выходных
светофоров. Кроме того, ДК предназначен
для обеспечения первичной информацией о поездном положении и состояниях
устройств других пользователей, посредством функционирования в ЛВС или СПД
[1,42].
На отечественных железных дорогах в
1936 начали применять ДЦ временного
кода. Затем была разработана частотная ДЦ. Дальнейшая модернизация привела к
созданию в 1967 г ДЦ системы «Нева» с циклическим способом передачи сигналов.
Она получила наибольшее распространение на сети дорог страны [50,17]. В 1978
введена в эксплуатацию система «Луч» с трехзначной относительной фазовой
манипуляцией. Сдвиг фазы в сторону опережения кодируется как сигнал логического
0, а в сторону отставания – как логическая 1. В настоящее время разрабатываются
и широко внедряются микропроцессорные ДЦ. К таким системам относятся ДЦ и ДК,
разработчики которых приведены в табл. 6.1. Функционально они отличаются незначительно, поэтому для
примера рассмотрим АПК-ДК (рис.6.5).
Таблица
6.1
Компьютерные системы диспетчерского
управления и контроля
|
Название |
Разработчик |
|
ДЦ «Юг» |
Северо-Кавказская дорога и НТП
«Промавтоматика», прототип система «ДОН» |
|
ДЦ Тракт |
«Техтранс» г.Санкт-Петербург |
|
Диалог-Ц |
РГТУПС, Москва |
|
ДЦ Сетунь |
ВНИИСА (использование центрального
оборудования, линейные пункты существующих систем Нева, Луч, ЧДЦ) |
|
ДЦ-ПК,АПК-ДК |
ПГУПС, Санкт-Петербург |
|
АСДК -Сектор |
ГТСС |
Подсистема
диспетчерского управления движением поездов входит в состав АПК-ДК и
предназначена для обеспечения диспетчерского аппарата отделения достоверными
данными о движении поездов на основе информации, получаемой от устройств
АПК-ДК, других существующих систем ДК(ДЦ) и дорожной АСОУП.
Подсистема
автоматически ведет исполненный и прогнозный график движения по диспетчерским
участкам, обеспечивает персонал справочной и нормативной информацией по
станциям и перегонам, а также ведет обмен информацией с системой АСОУП.
Основа
подсистемы - территориальная диспетчерская вычислительная сеть, объединяющая в
единую информационную структуру все звенья, связанные с процессом управления
движением поездов:
− станции,
оборудованные станционной аппаратурой АПК-ДК;
− существующие
центральные посты ДЦ;
− сетевые
компьютеры на рабочих местах ДНЦ, ЭЧЦ, ШНД, ШД.
![]()

Структура АПК-ДК трехуровневая. Первый
уровень представляет собой станционный аппаратно-программный комплекс
(аппаратура контроля сигнальной точки, аппаратура контроля аналоговой информации).
Технологический комплекс контроля и
диагностики состояния устройств СЦБ в ШЧ
включается во второй уровень системы. Технологический комплекс диспетчерского управления движением поездов в ЦУП – 3-ий уровень системы.
Структура
технических средств обеспечивает работоспособность системы в целом при
возникновении сбоев, отказов в ее отдельных узлах и устройствах. Имеется
возможность приема и передачи информации по стандартизированным СПД и работы в стандартных ЛВС (Novell NetWare,
Microsoft Networks, Banyan, QNX с различными протоколами - TCP/IP, NetBEU,
IPX/SPX и др.). Для работы АПК-ДК использованы многозадачные операционные
системы реального времени QNX, WINDOWS
NT.
Системное ПО включает в себя:
− сетевую операционную систему WINDOWS NT 4.0 SERVER или выше, интерфейс RS-485, RS-232;
− программное
обеспечение системы управления базой данных, поддерживающее SQL-запросы;
− сетевое
программное обеспечение поддерживающее функционирование администратора сети WINDOWS NT 4.0 SERVER RESOURS KIT или выше;
− сетевое
программное обеспечение, поддерживающее функционирование TCP/IP;
− сетевое
программное обеспечение для управления маршрутизаторами.
Основными целями создания ДЦ и ДК
является:
− автоматизация основных функций
поездного диспетчера ДНЦ;
− получение своевременной, полной и
достоверной информации об устройствах ЖАТС за счет, непрерывного контроля за их
техническим состоянием с помощью сигналов ТС (информация о состоянии объектов
передается в устройства ДК с периодичностью 50 мс, время передачи команд ТУ– не
более 0,2 с; сигналов ТС – не более 1 с);
− повышение надежности работы устройств,
за счет своевременного выявления предотказных состояний и профилактики сбоев.
Источниками информации в этих системах
[28,42,50] являются:
− приборы линейных пунктов, сигнальных
точек и переездов участков железных
дорог;
− станционные устройства автоматики,
позволяющие контролировать поездную и технологическую ситуацию на станции (РЦ,
сигналы, стрелки);
− аппаратура центрального поста ДК, ДЦ и
ЭЦ станций;
− станционные приборы и устройства,
позволяющие контролировать технические и технологические нарушения в работе
систем (повреждение источников питания, перегорание предохранителей, нажатие аварийных
кнопок и т. д.);
− аппаратура контроля аналоговых сигналов
(напр., ПИК-10);
− аппаратура ДИСК (ПОНАБ);
− приборы и устройства специальных систем
крупных сортировочных станций, обеспечивающих технологию сортировочной работы
(АРС, ГАЦ и пр.);
− аппаратура передачи данных (для приема
информации с СПД);
− пожарно-охранная сигнализация;
− прочие устройства.
Съем информации с приборов и устройств
предусматривает:
− непосредственное подключение входных
цепей контроллеров с использованием гальванических (опто- и релейных) развязок;
− использование релейных повторителей в
необходимых случаях;
− использование бесконтактного способа
подключения;
− подключение к пульту-табло, выносному
табло и пульту-манипулятору станций.
Совокупность контроллеров создает распределенную систему сбора и обработки
информации. В распределенной системе сбор информации выполняется контроллерами,
рационально приближенными к объекту. Программируемые индустриальные контроллеры
ПИК-120M или ПИК-10 используется в системе АПК-ДК.
Прибор ПИК-120М предназначен:
−
для
преобразования в стандартный цифровой вид постоянного или переменного
напряжения, поступающего на цифровые входы. Присутствие напряжения на
конкретном входе преобразуется в
логическую единицу, отсутствие - в логический ноль в соответствующем
бите байта;
−
для
передачи полученного в результате преобразования массива данных на внешний
хост-процессор по его запросу;
−
для
формирования сигнала включения внешнего модема радиоканала или других средств
связи.
Система АПК ДК работает с дискретными
сигналами, снимаемыми с пульта управления, и аналоговыми сигналами, снимаемыми
с путевых реле. По этой причине шкафы с контроллерами, реализующие сбор дискретной
информации, целесообразно разместить в
помещении, где расположен пульт ДСП.
На рис 6.6 изображена функциональная схема
прибора ПИК-120М. В состав прибора ПИК
-120М входят: плата микроконтроллера;
корпус с одним разъёмом СН2-10ШБ и пятью блочными разъёмами
РП14/30.

Рис. 6.6. Функциональная схема прибора
ПИК-120М.
На сто двадцать цифровых дифференциальных входов оптронного
преобразователя могут поступать
постоянные напряжения в диапазоне -36В ÷+36В или переменные
напряжения амплитудой 36В и частотой
50Гц. Эти напряжения через ограничительные резисторы прикладываются к оппозитно
включённым светодиодам входных оптронов.
Эмиттерные
выводы фототранзисторов оптронов каждой группы через последовательно соединённые
с ними диоды также объединены в одну цепь.
Далее, цепи поступают на выходы порта микроконтроллера. Устанавливая
высокий уровень напряжения на каком-либо проводе, можно блокировать выходы
соответствующей группы оптронов.
Коллекторы фототранзисторов одноимённых
групп оптронов нагружены на общий резистор, образуя схему "ИЛИ" (в
каждой из восьми сборок по 15 коллекторов). Для фототранзисторов первых
оптронов в группах это цепь "OUT1", для вторых "OUT2",...,
для восьмых "OUT8". Эти цепи "OUT1"..."OUT8"
соединены с восемью входами преобразователя уровня, формирующего на своих
выходах напряжения с уровнями ТТЛ. Если на каком-либо цифровом входе активной
группы оптронов есть напряжение, то на соответствующем выходе преобразователя
присутствует низкий уровень напряжение. В противном случае на выходе формируется
постоянное напряжение +5В.
В каждый момент времени активной может быть
только одна группа оптронов. На выходе преобразователя формируются напряжения,
соответствующие этой группе оптронов, и подаются на восемь входов порта микроконтроллера
для дальнейшего преобразования этого ряда сигналов в один байт.
Независимо от посылок ХОСТ-процессора
прибор ПИК-120М непрерывно ведёт обработку сигналов, поступающих на
цифровые входы.
Электропитание микроконтроллера и других
активных и пассивных компонентов
ПИК-120М осуществляется от стабилизатора напряжения +5В. На вход
стабилизатора подаётся нестабильное напряжения +10В от внешнего выпрямителя.
Связь микроконтроллера с управляющим ХОСТ-процессором осуществляется по двум
последовательным линиям типа
"токовая петля". Выходы микроконтроллера и линия связи соединены через
развязывающие оптронные преобразователи.
Одновременно к линии связи может быть
подключено 16 приборов ПИК-120М. Для исключения воздействия наводок, все
светодиоды оптронов зашунтированы
резисторами сопротивлением 10 кОм.
Прибор ПИК-10 имеет 10 аналого-цифровых
входов, и предназначен:
− для измерения средних значений
напряжений сигналов переменного тока;
− для измерения сопротивления изоляции
электрических цепей (кабель, монтаж и т.д.) контрольных объектов;
− для преобразования в стандартный
цифровой вид сигналов переменного и постоянного тока, поступающих на цифровые
входы;
− для передачи измеренных значений
напряжений и сопротивления изоляции в виде последовательного цифрового кода в
концентратор по его запросу;
− для передачи, полученного в результате
преобразования, состояния дискретных
датчиков в концентратор по его запросу.
В состав прибора ПИК-10 входят: плата
микроконтроллера, плата источника питания и реле, корпус и колодка для
установки на релейный статив.
Принцип работы ПИК-10 заключается в
следующем. К десяти аналоговым дифференциальным входам релейного коммутатора
могут прикладываться переменные напряжения амплитудой 0 В £
U £ 50 В и частотой 25 Гц, 50 Гц или 75 Гц. Эти напряжения
подаются через контакты релейного коммутатора. Для каждого канала свое реле.
Нормальное состояние контактов всех реле – разомкнутое. Реле начинают
включаться последовательно командам микроконтроллера только после того, как на
микроконтроллер от концентратора поступило проведение измерений напряжения и
сопротивления изоляции. На выход релейного коммутатора подается напряжение
через контакты одного из десяти реле, которое включено в данный момент. Во
включенном режиме может находиться только одно реле. С выхода релейного
коммутатора напряжение поступает на дифференциальный вход аналогового
преобразователя. Таким образом, к дифференциальному входу аналогового
преобразователя последовательно прикладывается напряжение каждого аналогового
канала для преобразования в восьмибитный код.
Для измерения сопротивления изоляции
используется входящий в состав ПИК-10 источник напряжения, создающий токи
утечки в измеряемой цепи, цепи аналого-цифрового преобразователя и коммутатора.
Способ измерения сопротивления изоляции основан на измерениях токов утечки,
протекающих между защитным заземлением релейного статива и одной из внешних
аналоговых цепей, которой в данный момент релейный коммутатор подключен к
ПИК-10. Измеренные токи утечки подаются на АЦП микроконтроллера и преобразуются
в цифровой код.
Кроме этого, ПИК-10 может быть
использован для контроля десяти дискретных датчиков. В этом датчике десять
цифровых дифференциальных входов оптронного преобразователя могут подаваться
сигналы переменного и постоянного тока амплитудой от 12 до 36 В и частотой (50±2)Гц.
Эти напряжения через ограничители прикладываются ко входам оптронов. С выходов
оптронов сигналы поступают на входы микроконтроллера, который производит
окончательное преобразование десяти сигналов.
Связь ПИК-10 с
концентратором осуществляются по инициативе концентратора по последовательным
портам передачи типа «токовая петля» или RS-485. Выходы микроконтроллера ПИК-10
и канал гальванических элементов. Максимальная скорость передачи информации
9600 бод.
В данном конспекте
для примера рассмотрен мобильный измерительный комплекс автоматики и радиосвязи
(МИКАР). Он предназначен для измерения и контроля параметров устройств АЛСН,
РЦ, САУТ, ПОНАБ (ДИСК), ПРС и оценки их технического состояния из
вагона-лаборатории на ходу поезда.
МИКАР
включает также одну или несколько ПЭВМ и диспетчер-коммутатор связи, через
который системы МИКАР подключаются к этим ПЭВМ. Он может быть сконфигурирован и
использован в различных вариантах. Варианты использования МИКАР определяются
порядком организации испытательных поездок вагона-лаборатории и рабочих мест
пользователей основных систем.
Диспетчер-коммутатор
связи систем с ПЭВМ – модуль, конструктивно размещенный в блоке измерения
координат пути. Взаимосвязь блоков каждой из систем со своими внешними
датчиками и взаимосвязь блоков между собой и с ПЭВМ осуществляется кабельными
линиями связи с применением разъемов.
Внутрисалонное
оборудование МИКАР (рис.6.7) состоит из блоков (АЛСН; САУТ; СКАП-М; блок
координат пути и диспетчера коммутатора (БКП-ДК); блок питания, ПЭВМ,
кабельного блока ввода-вывода, вводной антенной коробки (антенно-согласующего
устройства), измерительного приемника радиосвязи, технологической радиостанции
[29, 31].

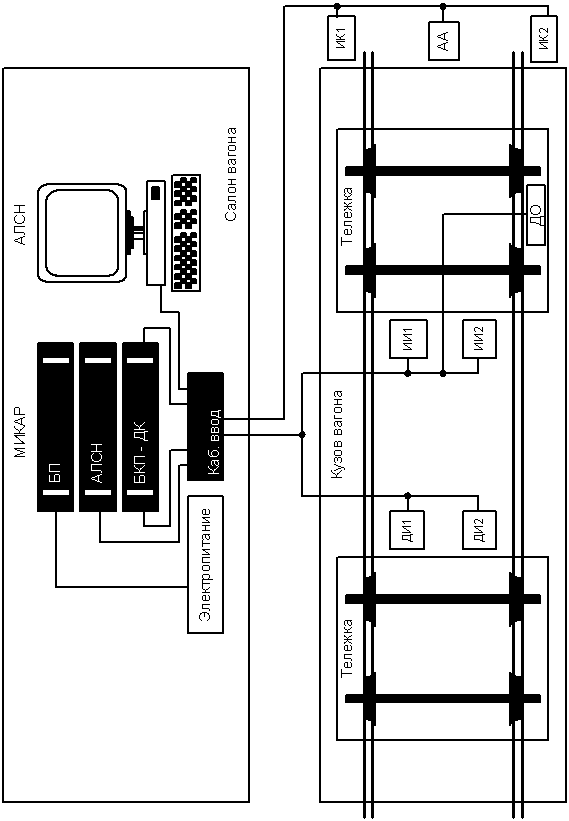
Рис. 6.7. Внутрисалонное оборудование МИКАР
На структурной схеме системы измерения
параметров АЛСН схематично изображены внутрисалонное и внесалонное оборудование
системы (рис. 6.8).
Вневагонное оборудование МИКАР состоит
из датчика оборотов колеса; индукторов и датчиков для регистрации изолирующих
стыков и сигналов тональных РЦ (ИИ1, ИИ2); измерительных антенн САУТ;
имитаторов греющихся букс; имитаторов греющихся подступичных областей; датчиков
температуры кузова вагона; измерительных катушек и антенны АЛСН к РАДИО.
Система
измерения АЛСН предназначена для применения в технологическом и метрологическом
процессе обслуживания напольных устройств АЛСН и РЦ путем измерения и оценки
эксплуатационных параметров этих устройств из вагона-лаборатории.
Система
измерения АЛСН обеспечивает:
- измерение амплитудных и временных
параметров сигналов АЛСН;

Основа
подсистемы - территориальная диспетчерская вычислительная сеть, объединяющая в
единую информационную структуру все звенья, связанные с процессом управления
движением поездов:
- станции,
оборудованные станционной аппаратурой АПК-ДК;
- существующие
центральные посты ДЦ;
-
сетевые компьютеры на рабочих местах ДНЦ, ЭЧЦ,
ДНЦО, ДНЦС, ШНД, ШД.
- обеспечение возможности долговременного
хранения измерительной информации;
- обеспечение возможности сравнения
результатов последних измерений с результатами измерений, полученными во время
предыдущих поездок вагона-лаборатории;
Система
измерения АЛСН содержит:
− датчик сигналов АЛСН РЦ - навесные
измерительные катушки АЛСН, устанавливаемые на типовые локомотивные на время проведения
измерений (ИК1, ИК2);
− выносная антенна АЛСН, устанавливаемая
на переднюю автосцепку локомотива на время проведения измерений (АА);
− измерительный приемник сигналов АЛС,
выполненный отдельным блоком в конструктиве МИКАР;
− блок координат пути, в котором
размещены модули для измерения координат пути (ДО - датчик оборотов колеса);
− регистрации изолирующих стыков и контроля
тональных РЦ (ДИ1, ДИ2);
− диспетчер-коммутатор связи с ПЭВМ;
− ПЭВМ типа IBM PC;
− датчиков температуры рельса (ДТР);
− датчиков углов крена и тангажа;
− датчика пройденного пути вагона (ДПП);
− датчика географических координат с
точностью определения местоположения.
Контролируемые параметры,
непосредственно измеряемые в процессе поездки:
− ширина рельсовой колеи;
− осадки каждой рельсовой нити;
− взаимное положение рельсовых нитей по
высоте;
− стрелы изгиба в плане перекосы пути на
базе тележки;
− перекосы пути на базе кузова;
− уклон продольного профиля оси пути;
− кривизна пути в плане;
− горизонтальные и вертикальные ускорения
кузова;
− скорость движения;
− величина стыковых зазоров;
− температура рельсов;
− боковой износ рельсов;
− наличия неровностей на поверхности
катания рельсов.
Параметры, вычисляемые после поездки:
− отметки продольного профиля пути;
− неровности продольного профиля пути;
− горизонтальные неровности в прямых
участках;
− параметры устройства кривых участков;
− и др. характеристики.
Управление
блоком АЛСН и передача информации из блока АЛСН в компьютер производится через
диспетчер-коммутатор блока координат пути БКП-ДК посредством протоколов обмена.
При этом из компьютера в БКП-ДК для блока АЛСН передается протокол запроса, а
из блока АЛСН через БКП-ДК в компьютер передается протокол ответа. Форматы протокола
запроса из компьютера в БКП-ДК для блока АЛСН (рис. 6.9) состоит из трех
байтов:
- 1-й байт содержит число 2 - это номер
системы измерения АЛСН в МИКАР. Этот байт предназначен для
диспетчера-коммутатора БКП-ДК и необходим ему для последующей передачи
протокола запроса в систему измерения АЛСН (блок АЛСН);
- 2-й байт содержит число 2 - это номер
системы измерения АЛСН в МИКАР. Этот байт предназначен непосредственно блоку
АЛСН;
- 3-й байт содержит информацию для
управления блоком АЛСН.
Значения битов этого байта представлены
на рис.6.9.
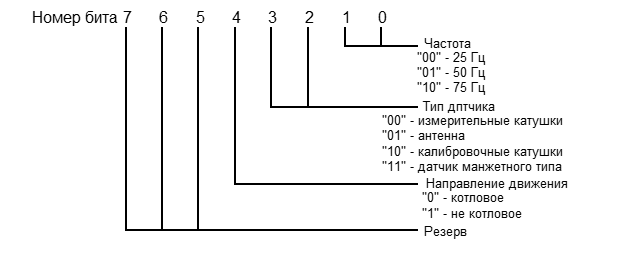
Рис.6.9. Форматы протокола запроса из
компьютера в БКП-ДК для блока АЛСН
Протоколы
запроса из компьютера в блок АЛСН поступают циклически. Время между смежными
протоколами запроса может изменяться в пределах от 0,3 до 1,5 секунд. На каждый
такой протокол запроса блок АЛСН немедленно отвечает протоколом ответа либо
первого, либо второго формата. Длительность передачи протокола ответа второго
формата не превышает 0,7 секунды.
Принцип действия
комплекса вагона-лаборатории (КВЛ) основан на сборе по заданной программе
информации с датчиков, приведение ее с помощью согласующих устройств к единому
формату и выдача на ПЭВМ «Параметры» для дальнейшей обработки с помощью
программных средств. Взаимодействие всех систем через информационную магистраль
обеспечивает ПЭВМ «Параметры», которая
производит вычисления в реальном времени «миллиметровых» параметров колеи,
запоминание этих параметров на сменном магнитном носителе, регистрацию ее на
принтере и, одновременно, передачу этих параметров в ЭВМ «Оценка и анализ» для последующей бальной
оценки состояния ж.-д. пути.
Функционально в
состав КВК входят три подсистемы, связанные между собой через локальную сеть:
подсистема измерений; подсистема оценки; подсистема графики и печати.
В состав подсистемы
измерений входит ПЭВМ «Параметры» с датчики
и согласующие устройства:
− интерфейсная плата
связи с 6-ю датчиками букса- кузов
(СУБК). В состав платы интерфейса СУБК входит однокристальная микро ЭВМ,
предназначенная для управления процессом измерений и предобработки их
результатов, а также восьми
входовая аналоговая часть, работающая и
на фазовом принципе. Первые шесть из этих входов используются для работы с 6-ю
датчиками БК, две оставшиеся - для подключения
датчиков измерения коротких неровностей.
СУБК генерирует прерывание в ПЭВМ «Параметры» каждые 4,1 мс;
− интерфейсная плата
связи с датчиком пути выполнена на основе платы специализированного вычислителя
типа «Торнадо», снабженного платой преобразователя уровня. Плата
преобразователя уровня принимает импульсы амплитудой 12В от датчика пройденного
пути 500имп/об.
− интерфейсная плата
связи с системой оптических датчиков. Обмен между платой и самой системой,
осуществляется по 16 разрядной одно направленной шине данных, с использованием 9 разрядной шины адреса, сигнала готовности и
строба. Сигнал готовности СОД генерирует в ПЭВМ «Параметры» прерывания. Кроме
обмена информацией с СОД интрейфейсная плата обеспечивает ввод информации от
кнопочных пультов и системы привязки к местности;
− интерфейсная плата
связи с инерциальной системой. Обмен между платой и инерциальной системой
осуществляется в последовательном коде.
Подсистема измерений осуществляет:
− опрос всех
измерительных датчиков;
− отбраковку и
фильтрацию недостоверных измерений;
− вычисление на основе
первичной датчиковой информации физических параметров рельсовой колеи;
− передачу параметров,
а также всех значений датчиков через локальную сеть в подсистему оценки и
подсистему графики и печати. Передача информации в оценочную и графическую
подсистему осуществляется через каждые 0,2 метра пройденного пути. Для
предотвращения “зависания” любой из 3-х ПЭВМ применен “датаграммный” способ передачи
информации без квитирования. Подсистема измерений запоминает всю собранную датчиковую информацию
в виде дискового файла. Кроме датчиковой информации, в этом файле запоминают
все параметры датчиков (весовые коэффициенты, смещения и т.д.). Наличие файлов
дает возможность на стоянке воспроизвести поездку с любого выбранного места с целью
детальной оценки.
В состав подсистемы оценки входит ПЭВМ “Оценка и анализ” (измерительная ПЭВМ
индустриального исполнения класса с жестким диском 4,3Мб, ОЗУ 32 Мб и 14-ти
дюймового монитора), принтер для печати результатов оценки состояния ж.-д.
полотна.
Подсистема «оценки» по мере получения по сети
информации от подсистемы «измерений» производит оценку параметров рельсов колеи
в соответствии с руководящими документами МПС. В случае обнаружения дефектов
пути с бальностью хуже 3-й степени подсистема «оценки» через локальную сеть
посылает в адрес подсистемы «графики и печати» соответствующую информацию.
Подсистема «графики и
печати» предназначена для наблюдения за графическими представлениями измерений
параметров и датчиков в “развертке” по пути. Подсистема отображает как
“параметрическую”, так и датчиковую информацию в любом наборе, определяемом
конфигурационными файлами. Подсистема обеспечивает печать на принтере номер
путевой ленты или участков. Она способна запоминать данные для печати и выдавать их на принтер после временных
перерывов в печати.
В состав системы
оптических датчиков (СОД) входят:
− датчики измерения
ширины колеи (ДШК) предназначены для измерения горизонтального расстояния от
головки рельса до датчика;
− датчики измерения
стрел изгиба (ДРК) предназначены для измерения вертикального и горизонтального
расстояний от головки рельса до датчика;
− датчики измерения
стыковых зазоров (ДСЗ) измеряют величину зазоров рельсовых стыков с учетом
температуры рельсов;
− датчики измерения
износа рельсов (ДИР) определяют степень износа рельса на высоте 13 мм от
поверхности катания рельса;
− кросс-соединительные
устройства (КСУ);
− пульт управления
системой оптических датчиков (ПУ СОД).
Принцип действия
оптических датчиков основан на бесконтактном способе измерения расстояний в
оптическом диапазоне волн. Исходя из требования работы как в светлое как и в
темное время суток, принята активная схема построения датчиков. Принцип работы
датчика заключается в передаче энергии в направлении объекта, размеры до
которого необходимо измерить, и в приеме отраженного от него излучения. В
качестве источника излучения используется полупроводниковый инфракрасный лазер
с длиной волны излучения 810 мкм.
Оптическая система
осветителя формирует на поверхности рельса пятно диаметром от 2 до 6 мм, для
датчиков РК. И поперечную полосу для датчиков ШК. Отраженный сигнал попадает в
фотоприемник, где преобразуется в величину, пропорциональную измеряемому
расстоянию. Геометрические характеристики рельсовой колеи определяются за счет
использования либо координатного приемника (ДШК), либо сканирующей системы
(ДРК). При использовании координатного приемника каждой чувствительной площадке
последнего соответствует определенная точка исследуемого пространства. В
сканирующей системе каждой точке исследуемого пространства соответствует
определенное угловое положение сканирующего луча.
Величина стыкового
зазора определяется посредством оптических
датчиков измерения стыковых зазоров. Для этого производят измерение
времени прохождения вагонам рельсовых стыков (частота импульсов заполнения 1
МГц). В целях исключения влияния скорости движения вагона, ДСЗ выполнен
двухканальным с калиброванным базовым расстоянием между каналами.
При прохождении
первого луча на началом стыкового зазора включается счетчики импульсов заполнения
обоих каналов. Первый отсчет фиксируется при прохождении 1-м лучом конца
стыкового зазора (n импульсов), второй отсчет фиксируется
при прохождении 2-м лучом начала стыкового зазора (N
импульсов).
Величина стыкового
зазора определяется из отношения:
![]() ,
(6.1)
,
(6.1)
где ![]() – величина стыкового зазора;
– величина стыкового зазора; ![]() – число импульсов калиброванного базового
расстояния;
– число импульсов калиброванного базового
расстояния; ![]() – число импульсов стыкового зазора;
– число импульсов стыкового зазора; ![]() –
величина базового расстояния.
–
величина базового расстояния.
В данной лекции были
рассмотрены виды технологических систем ж.-д. транспорта, используемые для
информационного обеспечения процесса управления перевозками и диагностическая
система с помощью вагон-лаборатории. Более подробно с этими системами можно
ознакомится в [18, 36, 51]. Структурные схемы и алгоритм функционирования систем
АЛС, контроля состояния подвижного состава на ходу поезда приведены в лекциях
8÷10. В этих системах используются датчики, рассмотренные в лекции 7. С
системами маршрутизации сортировочных отцепов на сортировочных горках и
устройствами телеконтроля состояния аппаратуры ЖАТ можно ознакомится
самостоятельно в [7, 11, 36].