| |       |
Лекция 3. КЛАССИФИКАЦИЯ И РАЗНОВИДНОСТИ
ДАТЧИКОВ
Если проанализировать
известные процессы измерений, то в подавляющем большинстве числовое значение
измеряемой величины получается, только после того, как тем или иным способом
видоизменим ее.
Рассмотрим в качестве
примера массу тела, которую мы измеряем с помощью обыкновенных равноплечих
весов. Под действием земного притяжения создаются силы. Масса тела вместе с
этими силами давит на одну чашку, а масса гирь – на другую. Подбирая гири, мы
добиваемся, равновесия массе гирь, принимая, что сила земного притяжения на
расстоянии между чашками остается одной и той же. Как видим, для измерения
массы нам пришлось преобразовать массы тела и гирь в силы, а для сравнения сил
между собой преобразовать их действие в механическое перемещение рычагов весов.
Другой пример –
измерение давления газа при помощи трубчатого манометра. Металлическая трубка
манометра, изогнутая по дуге, одним концом соединяется с резервуаром, в котором
необходимо измерить давление газа. Другой конец трубки запаян. Под действием
давления газа трубка разгибается и тем больше, чем больше давление. Свободный
конец трубки перемещается в пространстве. Так осуществляется первая ступень
преобразования. Перемещение конца при помощи системы рычагов и зубчаток
преобразуется во вращение оси (вторая ступень преобразования). На оси находится
стрелка, конец которой перемещается по дуге над шкалой с делениями. Эта третья
ступень преобразования, позволяющая получить числовое значение измеряемого
давления.
Приведенные примеры
показывают, что даже простые измерения проводятся путем преобразования
измеряемой величины. Для этого преобразования используются различные первичные
преобразователи.
В автоматических
устройствах широко используют электрическую энергию, обладающую
рядом преимуществ по сравнению с другими видами энергии, такими как: простота
передачи на большие расстояния, возможность аккумулирования и т. д. В то же
время величины, характеризующие
большинство процессов на транспорте, неэлектрические — скорость,
перемещение, температура, давление
и т. д. В
связи с этим часто возникает задача преобразования разнообразных
неэлектрических величин в электрические сигналы, изменяющиеся в соответствии с
изменением неэлектрических величии. Элементы, осуществляющие указанную задачу, называют датчиками (или преобразователями).
Электрические датчики, преобразующие неэлектрические входные
величины в электродвижущую силу или напряжение, называют генераторными
(активными) датчиками. Эти датчики не требуют постороннего источника питания.
Датчики, в которых изменение неэлектрической величины сопровождается
соответствующим изменением того
или иного электрического параметра (индуктивности, емкости, сопротивления), называют
параметрическими (пассивными). Параметрические датчики получают энергию от
вспомогательного источника.
К датчикам предъявляют следующие требования: непрерывность и
линейность статической характеристики, высокая чувствительность, низкая
инерционность, высокая надежность, минимальная стоимость, габаритные размеры и
масса.
На отечественных и зарубежных железных дорогах датчики [44]
применяют в системах:
− полуавтоматической
и автоматической блокировки (ПАБ, АБ)
для контроля занятости
перегона и блок– участков;
− автоматической
локомотивной сигнализации(АЛС), автоматического регулирования скорости и
автоматического управления тормозами (САУТ) для получения информации о
фактической скорости и местонахождении поездов;
− переездной
сигнализации (ПС) и ограждающих устройствах для сигнализации о приближении
поезда, контроля скорости приближения и движения подвижного состава;
− горочной автоматизации (ГАЦ, АРС) для определения скоростей и
ускорений отцепов для управления тормозными средствами, а также для контроля
свободности стрелочных участков и измерения веса отцепов;
− обнаружения
перегревшихся букс (ПОНАБ), наличия ползунов на колесах в проходящих поездах
для определения нарушения нормальных
условий эксплуатации и регистрации числа осей, проходящих через
контрольную точку;
− в
измерительных вагон- лабораториях;
Рассмотрим наиболее
распространенные типы датчиков.
Емкостным датчиком
называют такие датчики, в которых измеряемая величина преобразуется в значение
емкости непосредственно или при механических перемещениях. Известно, что
емкость плоского конденсатора ![]() пропорциональна
диэлектрической проницаемости среды e и рабочей площади
пластин
пропорциональна
диэлектрической проницаемости среды e и рабочей площади
пластин ![]() и обратно
пропорционально расстоянию между ними
и обратно
пропорционально расстоянию между ними ![]() :
:
![]() , (3.1)
, (3.1)
где ![]() - относительная диэлектрическая проницаемость среды между обкладками;
- относительная диэлектрическая проницаемость среды между обкладками; ![]() - активная площадь обкладок;
- активная площадь обкладок; ![]() - расстояние между обкладками.
- расстояние между обкладками.
Принцип действия
емкостных датчиков основан на изменении одной из величин ![]() ,
, ![]() ,
, ![]() . Как правило, емкостные датчики включают в мостовые схемы
переменного тока или колебательные контуры высокочастотных генераторов.
Характерные области применения емкостных датчиков –измерения механических
перемещений (емкостные микрометры), измерения уровней, измерения давлений и
т.д.
. Как правило, емкостные датчики включают в мостовые схемы
переменного тока или колебательные контуры высокочастотных генераторов.
Характерные области применения емкостных датчиков –измерения механических
перемещений (емкостные микрометры), измерения уровней, измерения давлений и
т.д.
Существуют
различные типы емкостных преобразователей.
Это может быть преобразователь,
представляющий собой конденсатор, одна пластина которого перемещается
относительно другой так, что изменяется
расстояние ![]() между пластинами. Функция преобразования
между пластинами. Функция преобразования ![]() нелинейная, причем чувствительность возрастает с уменьшением
нелинейная, причем чувствительность возрастает с уменьшением ![]() . Минимальное
значение
. Минимальное
значение ![]() определяется напряжением пробоя конденсатора. Такие
преобразователи используются для измерения малых перемещений (менее 1 мм).
определяется напряжением пробоя конденсатора. Такие
преобразователи используются для измерения малых перемещений (менее 1 мм).
Применяют также дифференциальный емкостный
преобразователь, в котором при перемещении центральной
пластины емкость одного конденсатора увеличивается, а другого уменьшается. Дифференциальная конструкция позволяет уменьшить
погрешность нелинейности или увеличить рабочий диапазон перемещений.
Возможно использование емкостного преобразователя для измерения
уровня жидкости. Емкость между электродами зависит от уровня жидкости,
так как диэлектрическая проницаемость контролируемой жидкости отличается от
диэлектрической проницаемости воздуха.
Емкостные преобразователи обычно питаются током
повышенной частоты (до десятков мегагерц), что позволяет увеличить
мощность выходного сигнала и снизить шунтирующее
действие сопротивления изоляции. Емкостные
преобразователи просты по конструкции, имеют высокую чувствительность и относительно малую
инерционность. К их недостаткам следует отнести влияние внешних электрических
полей, паразитных емкостей, температуры, влажности.
Принцип
действия индуктивных преобразователей основан на зависимости индуктивности или
взаимной индуктивности обмоток от положения, геометрических размеров и
магнитного состояния элементов их магнитной цепи.
Индуктивности
и взаимные индуктивности обмоток, расположенных на магнитопроводе, при
отсутствии рассеяния магнитного потока определяются формулами
 , (3.2)
, (3.2)
 , (3.3)
, (3.3)
где ![]() и
и ![]() - число витков
- число витков ![]() -й и
-й и ![]() -й обмоток;
-й обмоток; ![]() - магнитное
сопротивление, где
- магнитное
сопротивление, где  - активная составляющая
магнитного сопротивления, здесь
- активная составляющая
магнитного сопротивления, здесь ![]() ,
, ![]() ,
, ![]() - соответственно
длина, площадь поперечного сечения и относительная магнитная проницаемость
- соответственно
длина, площадь поперечного сечения и относительная магнитная проницаемость ![]() -го участка магнитопровода;
-го участка магнитопровода; ![]() - магнитная
проницаемость пустоты;
- магнитная
проницаемость пустоты; ![]() - длина воздушного
зазора;
- длина воздушного
зазора; ![]() - площадь поперечного
сечения воздушного участка магнитопровода;
- площадь поперечного
сечения воздушного участка магнитопровода;  - реактивная
составляющая магнитного сопротивления, здесь
- реактивная
составляющая магнитного сопротивления, здесь ![]() - потери в
магнитопроводе на частоте
- потери в
магнитопроводе на частоте ![]() , обусловленные вихревыми токами и гистерезисом;
, обусловленные вихревыми токами и гистерезисом; ![]() - магнитный поток в
магнитопроводе.
- магнитный поток в
магнитопроводе.
Из
приведенных формул следует, что индуктивность и взаимную индуктивность можно
изменять, воздействуя на длину или площадь поперечного сечения воздушного
участка магнитной цепи, на магнитную проницаемость или на потери в магнитопроводе.
Некоторые
типы индуктивных преобразователей схематически показаны на рис.3.1.
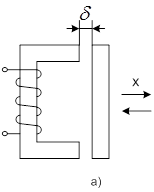
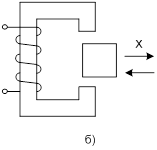

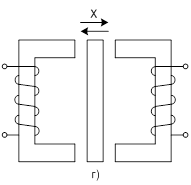
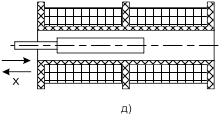
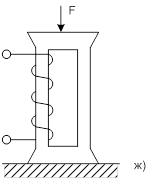
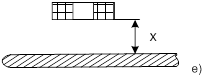
Рис.3.1.
Индуктивные преобразователи
Индуктивный
преобразователь (рис.3.1,а) с переменной длиной воздушного зазора ![]() характеризуется
нелинейной (близкой к гиперболической) зависимостью с перемещением 0,01 —10 мм. Преобразователь с изменяющейся площадью воздушного зазора позволяют измерять перемещения до 15—20 мм (рис.3.1,б). Преобразователь с
разомкнутой магнитной цепью применяется для измерения перемещений от 1мм до 100 мм (рис.3.1,г). Широкое распространение на практике
получили дифференциальные преобразователи, в которых перемещение подвижного
элемента вызывает увеличение индуктивности одной обмотки и уменьшение индуктивности
другой (рис.3.1,д,е.).
характеризуется
нелинейной (близкой к гиперболической) зависимостью с перемещением 0,01 —10 мм. Преобразователь с изменяющейся площадью воздушного зазора позволяют измерять перемещения до 15—20 мм (рис.3.1,б). Преобразователь с
разомкнутой магнитной цепью применяется для измерения перемещений от 1мм до 100 мм (рис.3.1,г). Широкое распространение на практике
получили дифференциальные преобразователи, в которых перемещение подвижного
элемента вызывает увеличение индуктивности одной обмотки и уменьшение индуктивности
другой (рис.3.1,д,е.).
Индукционные преобразователи применяются для измерений
скорости линейных и угловых перемещений.
Наибольшее применение они получили в приборах для
измерения угловой скорости (тахометрах) и в приборах
для измерения параметров вибраций, т. е. для измерения линейных и угловых перемещений и ускорений (в виброметрах
и акселерометрах).
Датчик используют,
напр., в системы автоматического
управления тормозами (САУТ) и устанавливают в корпус скоростемера на
буксе колесной пары. Он содержит в качестве основного элемента транзисторный
автогенератор с задающим LC-контуром и ротор, выполненный из стальной шестерни,
которая имеет 16 импульсов. При введении в зазор между базовой и коллекторными
обмотками автогенератора металлической пластины уменьшается коэффициент
обратной связи, вызывающий срыв генерации.
Ротор датчика
приводится во вращение от шейки оси колесной пары. Каждый зубец при вращении
ротора выполняет функцию металлической пластинки. За каждый оборот колесной
пары датчик выдает 16 импульсов. Таким образом, число импульсов, выработанных
датчиком, пропорционально пройденному пути, а их частота – скорости движения.
Коэффициент пропорциональности определяется диаметром колеса.
Другой разновидностью датчика
скорости используют
в системе автоматического регулирования скорости на метрополитене и
высокоскоростном наземном транспорте. Основными частями такого датчика являются
два постоянных магнита, сердечник и обмотка. Зубчатый ротор вращается вместе с
колесной парой. Датчик устанавливают на специальной крышке буксы подвижного
состава. Магнитный поток постоянных магнитов замыкается через зубья ротора и
при вращении колеса за счет изменения магнитного потока в сердечнике в обмотке
наводится ЭДС, частота которой пропорциональна скорости вращения колеса, т.е.
скорости движения поезда. Таким образом, датчик скорости преобразует скорость
движения поезда в частоту электрических сигналов.
Датчик
пути решает задачу измерения скорости вращения оси колесной тележки путём
фотоэлектрического преобразования сигнала прерываний светового потока щелевой
маски (диском с радиальными прорезями), усиления и порогового формирования
электрических сигналов импульсов.
В контактных датчиках
измеряемому механическому перемещению соответствует замкнутое или разомкнутое
состояние контактов, управляющих электрической цепью. Их применяют в системах
автоматического контроля, сортировки деталей по размерам и автоматической сигнализации.
В системах ЖАТ
распространение получили контактные датчики, выполняющие функции контроля
проследования подвижного состава и называемые рельсовыми педалями, а так же
путевые датчики весомера. Педали выдают электрический сигнал при срабатывании
контактов их выходных элементов в результате воздействия колеса на
воспринимающий пружинно-рычажный механизм датчика [5].
Примером
может служить педаль рельсовая, состоящая из корпуса, который крепят на
бетонном основании, контактной схемы с выводами, предохранительного кожуха и
прихвата на рельсе, соединенном посредством рычага с осью. Когда колесо
въезжает в зону действия педали и рельс просаживается на глубину 0,8 мм и
более, рычаг поворачивает ось с коромыслом, переключая контакты педали и
возвращая их в исходное положение при выходе колеса из этой зоны.
Действие мембранной
педали основано на передаче давления от прогиба рельса под подвижным составом
через нажимное приспособление на сжимаемую воздушную камеру, расположенную под
рельсом, и воздействия вытесняемого из этой камеры воздуха на мембрану, с которой
связана контактная схема.
Рассмотренные
контактные датчики применяют для счета осей подвижного состава только в
ограниченном диапазоне нагрузок на ось и скоростей подвижного состава. Вне этих
пределов педали не фиксируют группу проходящих осей или не выделяют отдельные
оси.
Магнитоэлектронный датчик применяют в
устройствах реверсивного счета осей на пути. Датчик работает в диапазоне
скоростей 0-200 км/ч. По принципу действия он близок к рассмотренному выше
датчику пути и скорости и описан в лекции 7.
Для преобразования
угловых или линейных механических перемещений в соответствующие изменения
сопротивления, напряжения или тока служит потенциометрический датчик, который
представляет собой резистор, включенный по схеме потенциометра.
На каркасе из
изоляционного материала размещена обмотка. По кромке провода обмотки
перемещается контакт щетки, приводимой во вращение осью. Движок соединяет
контакт щетки с щеткой токосъемного кольца. Ось вращения и движок электрически
изолированы друг от друга. Напряжение питания подается на зажимы потенциометра,
выходное напряжение снимается между одним из зажимов, на которые подается
питание, и контактом, соединенных с токосъемным кольцом.
Элемент, угловое
перемещение которого нужно преобразовать, механически связывается с осью,
положение которой определяет сопротивление, а следовательно, выходное
напряжение и ток в нагрузке. В качестве нагрузки ![]() может быть использован
электроизмерительный прибор, например вольтметр, отградуированный в значениях
угловых перемещений. Статическая характеристика потенциометрического датчика
показывает зависимость выходного напряжения от контролируемого угла поворота
подвижного контакта щетки в режиме холостого хода и при наличии нагрузки.
Обычно стремятся к реализации линейной статической характеристики. Для этого
необходимо выполнить соотношение
может быть использован
электроизмерительный прибор, например вольтметр, отградуированный в значениях
угловых перемещений. Статическая характеристика потенциометрического датчика
показывает зависимость выходного напряжения от контролируемого угла поворота
подвижного контакта щетки в режиме холостого хода и при наличии нагрузки.
Обычно стремятся к реализации линейной статической характеристики. Для этого
необходимо выполнить соотношение ![]() , где
, где ![]() – сопротивление
потенциометра.
– сопротивление
потенциометра.
Потенциометрические
датчики используют на тепловозах в качестве датчиков давления масла. Под
давлением масла мембрана, воздействующая на шток, рычажную передачу и далее
подвижной контакт потенциометра, прогибается.
Реостатные
преобразователи с проволочной обмоткой являются ступенчатыми (дискретными)
преобразователями, поскольку непрерывному изменению перемещения
соответствует дискретное изменение сопротивления.
Дискретный характер выходной величины определяет возникновение соответствующей
погрешности дискретизации, которая уменьшается с увеличением числа
витков обмотки. Поэтому реостатные преобразователи
обычно имеют не меньше 100—200 витков обмотки. Указанная погрешность дискретизаций отсутствует в реохордных преобразователях, в которых щетка скользит вдоль
оси калиброванной проволоки.
Гальванические преобразователи основаны на зависимости
ЭДС гальванической цепи от концентрации ионов в
электролите и окислительно-восстановительных
процессов, происходящих на электродах [7, 35].
Наиболее широко гальванические преобразователи используются в
качестве приборов для измерения
активности (концентрации) водородных ионов. Они основаны на свойствах
различных растворов (нейтральных, кислых, щелочных), которые зависят от
концентрации в них водородных ионов.
Гальванический преобразователь состоит из двух элементов:
измерительного электрода, помещенного в
исследуемый раствор, и вспомогательного элемента,
электродный потенциал которого должен оставаться постоянным. Измерение
ЭДС гальванических преобразователей должно производиться таким образом, чтобы через преобразователь не проходил ток, вызывающий погрешности от поляризации
электродов и падения напряжения на внутреннем сопротивлении
преобразователя, которое при
использовании стеклянных электродов составляет 107-109
Ом. Указанное требование делает
необходимым применение электрометрических
усилителей или компенсационных измерительных приборов. Следует также учитывать, что измерение давления с
помощью гальванических преобразователей
требует введения поправки
на температуру.
Термоэлектрические
преобразователи (термопары) [7] основаны на термоэлектрическом
эффекте, заключающемся в том, что в замкнутом контуре, состоящем
из двух разнородных
проводников (или полупроводников), течет ток, если места спаев проводников
имеют различные температуры.
Если взять замкнутый контур, состоящий из разнородных
проводников (термоэлектродов), то на их спаях и возникнут термо-ЭДС ![]() и
и ![]() , зависящие от температур
, зависящие от температур ![]() и
и ![]() этих
спаев. Так как эти термо-ЭДС оказываются включенными встречно, то результирующая термо-ЭДС
этих
спаев. Так как эти термо-ЭДС оказываются включенными встречно, то результирующая термо-ЭДС ![]() , действующая в контуре,
равна
, действующая в контуре,
равна
![]() . (3.4)
. (3.4)
При равенстве температур обоих спаев
результирующая термо-ЭДС равна пулю. Спай, погружаемый в
контролируемую среду, называется рабочим концом термопары, а
другой - свободным.
В
качестве приемных элементов в оптических датчиках используют фоторезисторы,
фотодиоды и фототранзисторы. Действие фототранзисторов основано на явлении
внутреннего фотоэффекта, состоящего в том, что в результате поглощения света в
полупроводнике фоторезистора появляются свободные электроны. Под действием
приложенного напряжения первичные электроны приходят в движение и сталкиваются
с атомами кристаллической решетки, вызывая дополнительный вторичный поток
электронов. Таким образом, при освещении фоторезистора его проводимость резко
увеличивается, что приводит к увеличению тока ![]() в цепи
нагрузки. Изменение интенсивности излучение влияет на их сопротивление в непроводящем
направлении. В фоторезисторах светом излучается базовая область. При этом
действие светового потока (подобно действию напряжения, прикладываемого между
базой и эмиттером в обычном транзисторе) приводит к увеличению тока эмиттера и
соответственно выходного тока коллектора.
в цепи
нагрузки. Изменение интенсивности излучение влияет на их сопротивление в непроводящем
направлении. В фоторезисторах светом излучается базовая область. При этом
действие светового потока (подобно действию напряжения, прикладываемого между
базой и эмиттером в обычном транзисторе) приводит к увеличению тока эмиттера и
соответственно выходного тока коллектора.
Оптические
датчики используют в СЖАТ на метрополитене для контроля скорости движения
поездов в районе остановочных платформ; в устройствах пассажирской автоматики
(турникетах); в устройствах контроля прохода в тоннель и пр. На сортировочных
горках оптические датчики контролируют свободность стрелочных участков при проследовании длиннобазных вагонов.
В
системах, предназначенных для автоматического обнаружения перегретых букс
подвижного состава (ПОНАБ), применяют датчики, реагирующие на инфракрасное
излучение от корпусов греющихся букс. Они называются болометрами. Эти датчики
преобразуют инфракрасное излучение от нагретых букс в электрические сигналы.
Приемные устройства срабатывают при достижении температуры шеек осей колесных
пар определенного значения, зависящего от настройки прибора. В сочетании с
рельсовыми педалями система ПОНАБ контролирует наличие нагретых букс и определяет
их порядковый номер.
Оптоэлектрические преобразователи
используются для бесконтактных измерений
разнообразных физических величин. Чаще всего под действием
измеряемой величины изменяется интенсивность излучения, например, вследствие
изменения температуры излучателя, изменения поглощения
или рассеяния оптического канала, однако могут изменяться также фазовый сдвиг между колебаниями в двух лучах,
вызываемый разностью оптического хода этих лучей,
частота и длина волны излучения, генерируемого
источником.
В преобразователях излучений выходная электрическая величина функционально связана с
характеристиками излучения. В зависимости от вида излучения
различают оптоэлектрические и ионизационные преобразователи.
В оптоэлектрических преобразователях
используется оптическое излучение видимого, инфракрасного или
ультрафиолетового диапазона. Источниками излучения
могут служить лампы накаливания, газоразрядные
лампы, светодиоды и лазеры. В качестве приемников излучения чаще
всего применяют фотоэлементы, фотоумножители, фоторезисторы, фотодиоды и фототранзисторы. Следует отметить, что фотоэлементы являются генераторными преобразователями, а
фотодиоды могут быть
генераторными или параметрическими преобразователями.
Оптоэлектрический преобразователь измеряемой
величины ![]() или
или ![]() в выходную электрическую величину
в выходную электрическую величину ![]() содержит источник излучения ИИ потока
содержит источник излучения ИИ потока ![]() ,
некоторый оптический канал
ОК и приемник излучения
ПИ, воспринимающий поток
и преобразующий его
в электрическую величину
,
некоторый оптический канал
ОК и приемник излучения
ПИ, воспринимающий поток
и преобразующий его
в электрическую величину ![]() (рис.3.2).
(рис.3.2).
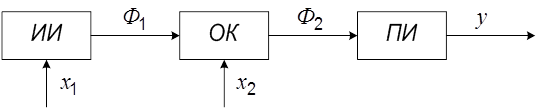
Рис.3.2.
Структурная схема оптоэлектрического преобразователя
Воздействие измеряемой величины на поток
излучения ![]() может осуществляться двумя
путями. В первом случае измеряемая величина
может осуществляться двумя
путями. В первом случае измеряемая величина ![]() воздействует непосредственно на источник излучения и изменяет тот или иной параметр излучаемого потока
воздействует непосредственно на источник излучения и изменяет тот или иной параметр излучаемого потока ![]() . Во втором случае измеряемая величина
. Во втором случае измеряемая величина ![]() модулирует соответствующий параметр потока
модулирует соответствующий параметр потока ![]() в процессе его распространения по оптическому каналу.
в процессе его распространения по оптическому каналу.
Пьезоэлектрические преобразователи основаны на использовании прямого пьезоэлектрического эффекта,
заключающегося в появлении электрических зарядов на поверхности некоторых
кристаллов (кварца, сёгнетовой соли
и др.) под влиянием механических напряжений. Это преобразователи генераторного типа, однако, их выходная мощность мала, поэтому к выходу преобразователя должен
быть подключен измерительный усилитель с возможно большим входным
сопротивлением (1011Ом и более).
В пьезоэлектрических преобразователях применяют главным образом кварц,
который обладает высокой
механической прочностью и очень слабой
зависимостью параметров от температуры.
Принцип действия термопреобразователей
сопротивления (терморезисторов) основан на зависимости электрического
сопротивления проводников и полупроводников от температуры. В основе работы тензорезисторов [7] лежит явление
тензоэффекта, заключающееся в изменении сопротивления резисторов, выполненных из проводников или полупроводников, при их
механической деформации.
Характеристикой тензоэффекта материала является
коэффициент относительной тензочувствительности
 ,
(3.5)
,
(3.5)
где ![]() - относительное
изменение сопротивления резистора;
- относительное
изменение сопротивления резистора; ![]() - относительное
изменение линейного размера резистора.
- относительное
изменение линейного размера резистора.
В настоящее время наиболее широко используются наклеиваемые тензопреобразователи
(рис.3.3).
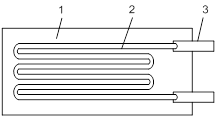
Рис. 3.3.
Тензочувствительный преобразователь
Преобразователь
представляет собой тонкую зигзагообразно уложенную и
приклеенную к полоске бумаги (подложке 1) проволоку 2 (проволочную
решетку). Преобразователь включается в схему с помощью
привариваемых или припаиваемых выводов 3. Преобразователь
наклеивается на поверхность исследуемой детали так, чтобы направление ожидаемой деформации
совпадало с продольной осью решетки.
Для изготовления
преобразователей применяется главным образом проволока диаметром 0,02—0,05 мм
из константана, имеющего коэффициент ![]() . Применяются также фольговые
и пленочные тензорезисторы, габаритные размеры которых меньше габаритных
размеров проволочных тензорезисторов.
. Применяются также фольговые
и пленочные тензорезисторы, габаритные размеры которых меньше габаритных
размеров проволочных тензорезисторов.
Изменение температуры
вызывает изменение функции преобразования тензорезисторов, что
объясняется температурной зависимостью
сопротивления преобразователя и различием температурных коэффициентов
линейного расширения материала тензорезистора и исследуемой детали. Влияние температуры устраняется
обычно путем применения соответствующих методов
температурной компенсации.
Для измерения выходной величины тензорезисторного преобразователя
чаще всего применяют мостовые схемы. Тензорезисторы всех типов находят широкое
применение для измерения деформаций, усилий, давлений, моментов и т. п.
Широкое распространение на практике получили более дешевые медные
терморезисторы, имеющие линейную зависимость сопротивления от температуры:
![]() , при
, при ![]() ,
(3.6)
,
(3.6)
где ![]()
Недостатком меди является небольшое ее удельное сопротивление и
легкая окисляемость при высоких температурах, вследствие чего конечный предел применения медных термометров сопротивления ограничивается температурой 180 ![]() . По стабильности и
воспроизводимости характеристик
медные терморезисторы уступают
платиновым.
. По стабильности и
воспроизводимости характеристик
медные терморезисторы уступают
платиновым.
Стандартные платиновые
термометры сопротивления имеют обозначение ТСП, а медные ТСМ. При температуре 0 ![]() сопротивления
сопротивления ![]() термометров равно: платиновых 1; 5; 1О; 50;
100; 500 Ом, медных 10, 50,
100 Ом.
термометров равно: платиновых 1; 5; 1О; 50;
100; 500 Ом, медных 10, 50,
100 Ом.
По сравнению с
металлическими тензорезисторами более высокой чувствительностью обладают
полупроводниковые терморезисторы (термитсоры). Они имеют отрицательный
температурный коэффициент сопротивления, значение которого при 20![]() составляет
составляет ![]() , т. е. на порядок больше, чем у меди и платины.
Полупроводниковые терморезисторы при весьма малых размерах имеют высокие
значения сопротивления (до 1МОм).
, т. е. на порядок больше, чем у меди и платины.
Полупроводниковые терморезисторы при весьма малых размерах имеют высокие
значения сопротивления (до 1МОм).
Для
измерения температуры наиболее распространены полупроводниковые терморезисторы
типов КМТ (смесь окислов кобальта и марганца) и ММТ (смесь окислов меди и
марганца).
Термисторы
имеют нелинейную функцию преобразования, которая достаточно хорошо описывается
формулой
![]() ,
(3.7)
,
(3.7)
где ![]() - абсолютная
температура;
- абсолютная
температура; ![]() - коэффициент, имеющий
размерность сопротивления;
- коэффициент, имеющий
размерность сопротивления; ![]() - коэффициент, имеющий
размерность температуры.
- коэффициент, имеющий
размерность температуры.
Кроме нелинейности функции
преобразования, недостатком термисторов является
плохая воспроизводимость характеристик, т.е.
значительное отличие
характеристик одного экземпляра
от другого.
В
современных ИИС используется большое количество разнообразных
первичных измерительных преобразователей. Они различаются и по физическим принципам работы, и по видам естественных выходных сигналов, так и по их динамическим
диапазонам и мощностям.
Для согласования первичного преобразователя с устройствами системы его выходной сигнал должен быть унифицирован, т. е. отвечать некоторым требованиям по уровню, мощности, виду носителя информации и т. д., которые определяются соответствующими стандартами.