| |       |
Сущность деятельности железнодорожного транспорта состоит в выполнении
перевозочного процесса при неукоснительном соблюдении безопасности
движения поездов. Перевозочный процесс сложен своей динамичностью,
взаимозависимостью работы его участников, непрерывно меняющимися ситуациями, воздействиями на него
большого числа дестабилизирующих
факторов и территориальной рассредоточенностью объектов. Поэтому автоматизация управления является важным фактором совершенствования
перевозочного процесса. Автоматизированные системы управления (АСУ) строятся на
основе современных технических средств и, в частности, средств вычислительной
техники. Поступившие в распоряжение разработчиков автоматизации вычислительные
машины открывают широкие возможности использования математических методов для
управления сложными процессами.
Однако, технические средства управления состоят не только
из устройств переработки всей
информации для получения команд или рекомендаций по управлению и
отображению информации человеку. Важную роль играет подсистема подготовки, получения и первичной обработки
информации о ходе технологического процесса. Именно эти вопросы и рассматриваются при изучении
дисциплины «Системы сбора информации на ж.-д. транспорте». Дисциплина служит
для формирования у студентов знаний об основных принципах построения,
метрологического обеспечения и функционирования систем сбора информации (ССИ) о
транспортных процессах и технических объектах железнодорожного транспорта. Для более глубокого изучения студент может
обратится к другим источникам литературы, ориентировочный список которых приведен
в конце конспекта.
В
курсе лекций автором собран материал, показывающий назначение измерительного
оборудования, основные принципы построения и метрологические показатели ССИ. Он
ориентирован на студентов специальности ²Информационные
системы², но может быть полезен и студентам
специальности «Автоматика, телемеханика и связь на железнодорожном транспорте».
СОКРАЩЕНИЯ используемые в тексте
|
АБ -
автоматическая блокировка АСК ПС -
автоматизированная система контроля
подвижного состава АЛС - автоматическая локомотивная сигнализация АТ – автоматика и
телемеханика АПД - аппаратура передачи данных АРМ - автоматизированное рабочее место АРС – автоматический роспуск составов АСК ПС - автоматизированная система контроля
подвижного состава АСОУП - автоматизированная система оперативного
управления грузовыми перевозками; АСУ - автоматизированные системы управления АЦП - аналого-цифровой преобразователь БД – база данных ВТ – вычислительная техника ГАЦ – горочная автоматическая централизация ДДК - детектор дефектных колес ДИСК –
дистанционная информационная система комплексная для задач ПОНАБ ДСО - датчики для счета осей ДНЦ – поездной диспетчер ДСП – дежурный по станции ДЦ -
диспетчерская централизация ДЦ ФТО – дорожный
центр фирменного транспортного обслуживания ЕКС - единая комплексная система управления и
обеспечения безопасности движения ЖАТС –
ж.-д.автоматика и связь ИВЦ - информационно вычислительный центр ИИС - информационно-измерительные системы ИП - измерительный
преобразователь КБД - кодовый бортовой датчик КВЛ - комплекс вагона-лаборатории КЛУБ - комплексное локомотивное устройство
безопасности |
КТСМ – комплекс
технических средств многофункциональный для ПОНАБ ЛС – локомотивный
светофор МПС – министерство
путей сообщения МФД -
многофункциональный датчик НИС – служба
информатизации и связи НОД – отделение
железной дороги НСУ - напольное считывающее устройство ПАБ - полуавтоматическая блокировка ПД - путевой датчик
ПК – перефирийный
контроллер ПО - программное
обеспечение ПОНАБ – приборы
обнаружения перегретых букс ПП - первичный
преобразователь ПТО - пункт технического обслуживания ПЧ - дистанция пути РТУ - ремонтно-технологический участок РЦ - рельсовые цепи
САУТ -
система автоматического управления тормозами СПД - сеть передачи данных СИ – средство измерений ССИ - системы сбора информации СЦБ – сигнализация,
централизация и блокировка ТД – техническая
диагностика ТО - техническое
обслуживание ТП - технологические процессы ТУ,ТС – сигналы ДЦ (телеуправления, телесигнализации) ТПС - тяговый подвижной состав ТЧ – локомотивное
хозяйство УВК - управляющий вычислительный комплекс УКТП - устройство
контроля тормозов поезда ЦАП - цифро-аналоговый преобразователь ЦУП - центр
управления перевозками ФВ – физическая
величина Ш – служба СЦБ ШЧ - дистанции сигнализации, связи и вычислительной
техники ЭЦ - электрическая централизация |
Лекция 1. ОРГАНИЗАЦИЯ СИСТЕМ СБОРА ИНФОРМАЦИИ
Измерение представляет собой информационный процесс, результатом которого
является получение информации. Измерительная информация обязательно
представляется в числовой форме и в дальнейшем используется либо
человеком-оператором, либо автоматизированной системой, осуществляющей
обработку, хранение и передачу этой информации.
Объектом
измерения является та или иная физическая величина (ФВ). Физическая величина определяется как свойство, общее в качественном
отношении многим физическим объектам (физическим системам, их состояниям и
происходящим в них процессам), но в количественном отношении индивидуальное для
каждого объекта. Например, ФВ являются
масса, расстояние, давление, сила, электрическое сопротивление и т. п.
Очевидно, что не все физические свойства
реальных объектов являются ФВ. К таким физическим свойствам относятся,
например, форма тела или фигуры, запах, цвет. Указанные физические свойства не
относятся к физическим величинам и не могут быть измерены. Поэтому ФВ иногда
определяют как физические свойства, поддающиеся измерению [22, 25].
Из
определения измерения следует, что для получения измерительной информации
необходимо сравнить измеряемую величину с физически однородной ей величиной
известного размера. Для числового представления результата сравнения
используется единица измерения.
Единица изменения — это ФВ, которой по определению присвоено числовое значение,
равное единице [12].
При
выбранной единице измерения результат сравнения можно записать в виде формулы
 , (1.1)
, (1.1)
где
![]() — измеряемая величина;
— измеряемая величина; ![]() - единица измерения;
- единица измерения; ![]() — числовое значение измеряемой величины в
принятых единицах измерения.
— числовое значение измеряемой величины в
принятых единицах измерения.
Истинное значение
физической величины — значение ФВ, которое
идеальным образом отражало бы в качественном и количественном отношениях
соответствующее свойство объекта. Определить экспериментально истинное значение
ФВ невозможно, оно остается неизвестным экспериментатору. В связи с этим при
необходимости (напр., при проверке средств измерений) вместо истинного значения
ФВ используют ее действительное значение.
Действительное значение
физической величины – значение ФВ, найденное
экспериментальным путем и настолько приближающееся к истинному значению, что
для данной цели может быть использовано вместо него. Действительное значение ФВ
определяют по образцовым мерам и приборам, погрешностями которых по сравнению
с погрешностями поверяемых средств измерений можно пренебречь.
Наука об измерениях называется метрологией.
Метрология поддерживает следующие цели: достоверность измерений; точность измерений;
единство измерений [32, 35].
Погрешность измерений – отклонение результата измерений от действительного значения
измеряемой величины. Она возникает из-за несовершенства используемых средств и
методов измерений.
Средство измерений – это техническое средство (или их комплекс), предназначенное для
измерений, имеющие нормированные метрологические характеристики,
воспроизводящие и (или) хранящие единицу физической величины, размер которой
принимается неизменным (в пределах установленной погрешности) в течение
известного интервала времени.
Под
метрологическими характеристиками
понимаются такие свойства средств измерения, которые позволяют судить об их
пригодности для измерения определенной ФВ с заданной точностью и в заданном
диапазоне.
Методы измерений представляет собой совокупность приемов использования средств
измерений [24, 41]. Существует несколько видов измерений.
По
характеру зависимости измеряемой величины от времени измерения разделяются на статические, при которых измеряемая
величина остаётся постоянной во времени, и динамические,
которые изменяются во времени. Статистическими измерениями являются, например,
измерения размеров тела, постоянного давления, динамическими – измерения
пульсирующих давлений, вибраций.
По
способу получения результатов измерений их разделяют на прямые, косвенные,
совокупные, совместные. Прямые – это
измерения, при которых искомое значение ФВ находят непосредственно из опытных
данных. Прямые измерения можно выразить формулой ![]() , где
, где ![]() – искомое значение
измеряемой величины, а
– искомое значение
измеряемой величины, а ![]() – значение, непосредственно
получаемое из опытных данных. При прямых измерения измеряемую величину
сравнивают с мерой непосредственно или же с помощью измерительных приборов,
градуированных в требуемых единицах.
– значение, непосредственно
получаемое из опытных данных. При прямых измерения измеряемую величину
сравнивают с мерой непосредственно или же с помощью измерительных приборов,
градуированных в требуемых единицах.
Косвенные –
это изменения, при которых искомую величину определяют на основании известной
зависимости между этой величиной и величинами, подвергаемыми прямым измерениям.
Значения измеряемой величины находят путем вычисления по известной формуле ![]() , где
, где ![]() – знак функциональной
зависимости, форма которой и природа связанных с ею величин заранее известны;
– знак функциональной
зависимости, форма которой и природа связанных с ею величин заранее известны; ![]() - значения величин,
измеренных прямым способом.
- значения величин,
измеренных прямым способом.
Примерами
косвенных измерений могут служить определение объема тела по прямым измерениям
его геометрических размеров, определения массы жидкости по измеренному объему,
плотности, температуре, давлению и др. Косвенные измерения широко
распространены в тех случаях, когда искомую величину невозможно или слушком
сложно измерить непосредственно или когда прямое измерение дает менее точный результат.
Роль косвенных измерений особо велика при измерении величин, недоступных
непосредственному экспериментальному сравнению, например, размеров
астрономического или внутриатомного порядка.
Совокупные –
это измерения, производимые одновременно для нескольких одноименных величин,
при которых искомую величину определяют решением систем уравнений, получаемых
при прямых измерениях.
Совместные измерения
– это измерения, производимые одновременно (прямые или косвенные) двух или
нескольких не одноименных величин. Целью совместных измерений является
нахождение функциональной зависимости между величинами, например, зависимости
размеров тела от температуры, объема жидкости от давления и т.д.
При
проведении измерений требуются следующие виды совместимости. Информационная совместимость
обеспечивается согласованностью входных и выходных сигналов; стандартными
интерфейсами, под которыми понимаются как средства сопряжения отдельных модулей
и блоков, так и правила обмена информацией между блоками, перечень команд. Метрологическая совместимость
обеспечивается согласованностью метрологических характеристик отдельных блоков
и модулей. Энергетическая совместимость достигается унификацией
параметров энергопитания, схем, конструкций и технических характеристик
источников и трасс энергопитания. Конструктивная
совместимость достигается унификацией форм и разновидностей элементов
конструкций, типоразмеров элементов, использованием единых прогрессивных технологических
процессов и сборки конструкций, обеспечения удобства использования и соблюдения
единого стиля оформления. Программная
совместимость обеспечивается унификацией, согласованностью и нормированием
правил обмена информацией между функциональными блоками и модулями.
Различают
три способа сбора, регистрации данных: ручной; механизированный (с помощью
специальных средств автоматизации сбора и регистрации); автоматический.
При
ручном способе данные вручную
заносятся на первичные документы, а затем с помощью устройств подготовки данных
переносятся на машинные носители для автоматического ввода их в ЭВМ.
При
механизированном способе используют
машиночитаемые документы, представляющие собой первичные документы, совмещенные
с машинным носителем (дуаль-карты, типизированные бланки для читающих
автоматов, регистраторы). В машиночитаемых документах данные записываются
специальными знаками, например в банковских чеках, железнодорожных билетах,
накладных и др.
Автоматизированный
сбор информации осуществляется со специальных систем
сбора и регистрации информации, позволяющих собирать информацию одновременно с
большого количества абонентских пунктов. Это позволяет непрерывно фиксировать
состояние перевозочного процесса, выполнение графика движения поездов,
подсчитывать основные и итоговые показатели работы различных ведомств МПС [6].
В
самом общем случае компьютеризированная
измерительная система может быть спроектирована двумя способами: как
централизованная система и как децентрализованная система.
На рис 1.1 показана измерительная система
[22, 39] с «децентрализованной» архитектурой. В этой системе каждый канал
содержит свои собственные узлы преобразования, и только цифровой процессор работает
в режиме временного мультиплексирования. Такой принцип позволяет производить
оптимизацию в каждом канале независимо. Кроме того, блоки преобразования при
такой архитектуре могут быть в k - раз более медленными, чем те же
узлы в централизованной системе. Следовательно, эти отдельные блоки
преобразования будут менее дорогими. В такой системе преобразование можно
выполнять локально в месте расположения источника сигнала, а это означает, что
сигналы от измерительного источника к процессору можно передавать в цифровом виде
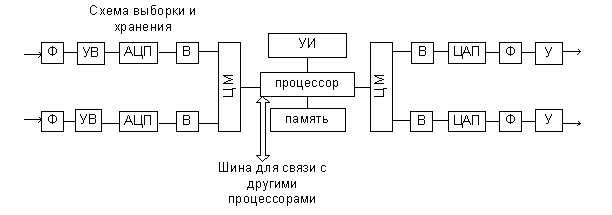
Ф – фильтры; УВ – устройства взятия выборок;
ЦАП – преобразователи; В – буферные схемы; ЦМ – цифровой мультиплексор; УИ –
устройство индикации; У – усилители.
Рис. 1.1. Децентрализованная измерительная схема
(а не в виде
аналоговых сигналов, которые очень чувствительны к помехам). Далее, используя
микрокомпьютеры, каждый из каналов можно снабдить своим препроцессором,
разгружающим главный компьютер. Соединение между процессорами в измерительной
системе может быть реализовано в виде «шины». О системе с такой архитектурой
говорят как о распределенной измерительной системе. Процессор может быть
соединен также с другими, автономно работающими измерительными системами, не
входящими в состав сбора данных. Часто это осуществляют с помощью той или иной
стандартной шины (например, с помощью IEEE-488).
В централизованной системе части,
ответственные за преобразование сигнала, используются для обработки всех
сигналов последовательно. Поэтому соответствующая электроника размещается
обычно в центральном компьютере. Достоинства этой системы очевидны: благодаря
использованию частей, ответственных за преобразование сигнала, по принципу
разделения времени стоимость системы низка [22].
Если
в централизованной системе сбора данных сигналы в отдельных каналах сильно
различаются по величине, то можно в центральную часть системы добавить
программируемый усилитель. Тогда его коэффициент усиления будет изменятся
процессором одновременно с изменением адреса канала. Однако переключение
усилителя на новое значение коэффициента усиления потребует определенного
времени и из-за этого максимальная скорость сканирования в системе понизится.
Поэтому важно разбивать каналы на группы с примерно одинаковым уровнем
сигналов. Тогда можно будет программируемый усилитель переключать не каждый раз
при обращении к новому каналу. Еще лучше воспользоваться субкоммутацией,
предусмотрев, например, три входных мультиплексора (для работы с сигналами
низкого, среднего и высокого уровня) и включив на выходе каждого из них свой
усилитель с фиксированным коэффициентом усиления так, чтобы только после этого
происходило окончательное мультиплексирование сигналов в один канал.
На
вход одного из каналов системы часто подают «опорный сигнал» или «сигнал
калибровки». Тогда можно обнаружить уход коэффициентов передачи и
запрограммировать цифровой процессор на коррекцию этих ошибок.
Нередко
система сбора данных должна воспринимать также ряд двоичных сигналов, таких,
например, как положение переключателей или входные сигналы датчиков обнаружения
(пожара, перегрузки и других нежелательных событий). Система сбора данных
должна содержать также «блок синхронизации и управления», работающий под
управлением компьютера. Этот блок вырабатывает управляющие сигналы, необходимые
для надлежащего функционирования самой системы, на основе которых генерируются
адреса каналов, выдаются команды перехода в режим хранения и команды
преобразования, устанавливаются коэффициенты усиления и т.д.
Поскольку
фактически все измеряемые параметры и переменные макроскопических физических
процессов в окружающем нас мире являются аналоговыми по своей природе. Поэтому
мы принимаем в качестве определения, что аналоговый измерительный сигнал – это
такой сигнал, величина (амплитуда) которого известна для каждого момента в
пределах выделенного отрезка и может принимать любые значения в интервале между
определёнными нижним и верхним пределами. Таким образом, аналоговый сигнал
является непрерывным как по времени, так и по величине.
Цифровые
компьютеры не могут манипулировать с такими сигналами непосредственно; они
могут обрабатывать и вырабатывать только цифровые сигналы. Чтобы переходить от
аналоговых сигналов к цифровым (и обратно), нам необходимо выполнить процедуру,
носящую название «преобразование сигнала». Частью такого преобразования является
отображение непрерывного по времени сигнала в дискретный по времени сигнал.
Дискретный по времени сигнал определён только в отдельных точках на оси
времени. Он получается из аналогового сигнала путём дискретизации по времени.
Такой сигнал легко получить с помощью электронной схемы взятия выборок.
Помимо
способности обрабатывать только те
данные, которые относятся к дискретным моментам времени, компьютер имеет дело
со словами ограниченной длины. Поэтому он может воспринимать величину сигнала
лишь с конечным разрешением. Компьютер является устройством, для которого не
только время является дискретным, но и величина также является квантованной.
Поэтому необходимо сделать так, чтобы значение входного сигнала изменялось
только скачками конечной величины. Такое преобразование называют « квантование
по величине». Оно осуществляется аналого-цифровым преобразователем. Таким образом
, до того, как измерительный сигнал можно будет ввести в компьютер, необходимо
получить выборки этого сигнала (дискретизировать по времени) и их проквантовать
(дискретизировать по величине). Сигнал такого типа, дискретизированный по
времени и квантованный по величине, называют «цифровым сигналом».
Железнодорожный
транспорт обрабатывает большое количество информации. Напр., по существующей
системе ручного ввода информации в хозяйстве перевозок разрабатывается и
составляется 15 форм отчетности о вагонных парках. Они содержат в среднем за
сутки 969 показателей. При этом учитывается, что 11 форм составляются с
ежесуточной периодичностью, три – с ежемесячной и одна – с годовой. Ручная
система сбора и оперативной отчетности на железнодорожном транспорте,
технология передачи и обработки отчетности мало эффективна, приводит к большим
и нерациональным затратам труда и средств. При рыночной экономике объективная
необходимость выдвигает на первый план сокращение этих трудозатрат. Поэтому в
настоящее время активно внедряется
автоматизация рабочих мест (АРМ) служащих на основе средств вычислительной техники (ВТ). Новая
технология основана на использовании АРМ, представляющего собой проблемно -
ориентированный программно-технический комплекс, вынесенный на рабочее место
пользователя и автоматизирующий его основные производственные функции. Функциональная структура АРМ, состав
его программного обеспечения зависят от
множества задач, вытекающих из
предметной области пользователя.
Основные
области применения АРМ – автоматизация принятия управленческих решений и автоматизация
технологической деятельности. Использование АРМ повышает оперативность управленческого труда
и позволяет осуществить учет трудно
формализуемых факторов, характеризующих экономическую среду, в которой
функционирует предприятие; поиск
эффективных решений оптимизационных
задач.
Многоуровневая
система управления [37] и обеспечения безопасности на ж.-д. транспорте
реализуется (рис.1.2) как совокупность трех взаимодействующих
аппаратно-программных комплексов:
 Рис. 1.2.
Технические средства и системы СЦБ
Рис. 1.2.
Технические средства и системы СЦБ
на
тяговом подвижном составе – единая комплексная система управления и обеспечения
безопасности движения (ЕКС); на базе средств СЦБ – многоуровневая система
управления и обеспечения безопасности (МС-СЦБ); работа всех средств СЦБ
контролируется специально создаваемым управляющим вычислительном комплексом
(УВК); на базе АСУ хозяйствами с использованием информационных систем ОАО «РЖД»
- информационная подсистема АСУ МС.
Главное
назначение АСУ МС – автоматизированное обеспечение соблюдения технологии работы
железнодорожного транспорта путем сбора, обработки и анализа соответствующей
информации АСУЖТ с последующим воздействием на МС-СЦБ и ЕКС. АСУ МС (рис.1.2) обеспечивает
взаимодействие информационно-управляющих систем с многоуровневой системой.
Взаимодействие с ЕКС происходит по цифровой системе радиосвязи. Информация о
работе дорожного уровня отражается на сайте МС, расположенного на ГВЦ.
Система
АСУ МС состоит из
нескольких уровней. Уровни управления движением поездов включает:
− аппаратуру
и устройства управления и контроля объектами (стрелки, светофоры, локомотивы,
поезда, маршруты, УКПС и др.);
− микропроцессорные
системы локального (локомотив, станция) назначения, формирующие управляющие
команды и контролирующие состояние объектов управления; эти системы
обеспечивают выявление, регистрацию и передачу на следующий уровень информации
об отклонениях состояния технических средств от заданных алгоритмов действия;
− микропроцессорные
(компьютерные) системы ограниченного назначения (участок железной дороги,
отделение дороги), связанные с локальными системами цифровыми каналами связи и
обеспечивающие концентрацию и распределение информации для верхних уровней
управления, а также для организации технического обслуживания (ТО) средств ЖАТ;
− аппаратно-программный
комплекс в региональном (дорожном) центре управления перевозками, связанный
каналами связи с нижними уровнями системы и обеспечивающий режим для
оперативного персонала, управляющего перевозками и обслуживанием технических
средств.
К АСУ ж.д. транспорта относят три уровня
программно-технических
комплексов:
сетевой (ОАО РЖД, МПС, ГВЦ); дорожный (ИВЦ дорог, центры управления перевозками
ЦУП, дорожный центр фирменного транспортного обслуживания ДЦФТО); линейный (абонентские пункты АСОУП, АРМ
линейных предприятий). На рис.1.3
показана структурная схема сбора информации в службах НИС, СЦБ.
Эффективным
средством совершенствования организации перевозочного процесса являются системы
ж.-д. автоматики (СЖАТ). За счёт внедрения СЖАТ увеличивается пропускная
способность, участковая скорость, степень безопасности движения поездов,
производительность и условия труда, уменьшаются эксплуатационные расходы.
Дистанции сигнализации и связи (ШЧ) производят ТО устройств ЖАТС.

ТС – данные о текущем состоянии; А –
администрирование; НО – наработка на отказ;
ТСД – данные о текущем состоянии в динамике; УО – учетные данные об отказе;
СО – статистика отказов; РР – рекомендации персонала; СТ – стрелочный перевод;
СВ – светофор; ПЕР – переезд; П – пути; ПИТ – питание; РЦ – рельсовые цепи
Рис.1.3. Структурная схема сбора информации в службах
НИС, СЦБ ж.-д. тр-те
Для
обеспечения координации работы подразделений, обслуживающих ЖАТ и связи,
вычислительной техники созданы службы соответственно СЦБ и НИС.
Начальным
пунктом зарождения информации является линейная станция. Оттуда данные
поступают в отделение или в управление
дороги, в ИВЦ, оттуда в ГВЦ и потом пользователям. Для обеспечения высокой эффективности
работы действующих и вновь создаваемых АСУ технологическими процессами (ТП) –
АСОУП, ДИСПАРК, АКС ФТО, ДИСКОР и др. объединены в комплексы информационных
технологий КИТ1 и КИТ3 [37].
Для ж.-д. транспорта основным направлением
является управление перевозками грузов и пассажиров, а также связанные с ним
технологические процессы (ТП). Для реализации этого направления функционирует
автоматизированная система оперативного управления грузовыми перевозками
(АСОУП). Задача этой системы – получение информационного отображения
перевозочного процесса на любой момент времени [16]. Сбор информации для АСОУП
осуществляется от различных (рис.1.4) автоматизированных подсистем
сортировочных и грузовых станций, терминалов на контейнерных пунктах,
диспетчерских участков и пр.
 Рис.1.4. Упрощенная
структурная схема сбора информации для АСОУП
Рис.1.4. Упрощенная
структурная схема сбора информации для АСОУП
АСОУП
обеспечивает контроль дислокации и повагонный состав поездов, дислокацию
локомотивов; прогнозирует подход поездов, вагонов и грузов; информирование
грузополучателей; слежение за отдельными видами перевозок; контроль передачи
поездов через стыковые пункты; поездное положение на участках.
На
базе АСОУП разрабатываются и внедряются системы по управлению парком грузовых
вагонов (ДИСПАРК), контейнерным парком (ДИСКОН), локомотивным парком (ДИСЛОК),
перевозками опасных грузов (СМОГ), расследованию случаев коммерческой
несохранности грузов (ЕАСАПР), перевозкой негабаритных грузов (ТРАНСПОРТЕР).
Кроме того, на информации АСОУП работают диспетчерские центры управления перевозками
на дорогах и БД на сетевом уровне [18,
40].
Сбор
данных со станции и из вагонных депо об дислокации и использовании вагонного
парка производится системой ДИСПАРК.
Данная система контролирует проследование вагонов, их состояние, имеет базу
данных с техническими паспортами всего парка вагонов (форма ВУ-4), автоматизированное
составление натурных листов поезда,
отчетов формы ДО-1,ДУ-11, ДО-15 и пр.
Составной
частью интегрированной автоматизированной системы управления ж.-д. транспортом
является система управления линейного уровня контейнерными пунктами (АСУ КП).
Структурно АСУ КП представляет собой локальную вычислительную сеть,
объединяющую АРМ работников контейнерного пункта (рис.1.5).

Рис.1.5. Структурная
схема АСУ КП
В
АРМ приемосдатчиков решается более 100 функциональных задач, которые могут быть
сформированы в следующие комплексы: планирование, оперативная работа, выдача
оперативных документов, справки, анализ ситуации, отчетность, работа с архивом,
поддержка кассовых терминалов «Экспресс». Для просмотра и анализа показателей и
создания различных выходных форм работы предприятий, НОД, дороги создана
система ДИСКОР. Кроме того, к технологическим информационным системам относят:
единый комплекс интегрированной обработки дорожной ведомости ЕК ИОДВ; комплекс
по интегрированной обработке маршрутов машинистов ИОММ; автоматизированную
комплексную систему управления сортировочными станциями АСУ СС. Они позволяют
достичь высокого качества планирования поездной и маневровой работы.
К
оперативно-технологической информации, вводимой в АСУ СС, относится время
прибытия поезда и его номер, уход поездного локомотива, подача маневрового
локомотива, готовность состава к роспуску, ход накопления составов, готовность
поезда к отправлению, ситуация на подходе к станции и т.д. Существующие системы
управления станционной работой (ГАЦ, ЭЦ, АБ) не позволяют непосредственно, без
промежуточных устройств, вводить вышеперечисленную информацию в АСУ СС. На
первом этапе она вводится операторами вручную, что может привести к ошибкам и
потерям информации и запоздалых принятий решений. На втором этапе управления
сортировочной станцией в реальном масштабе времени исходная информация поступает
с ИВЦ и с АРМ на станции. На основании этой информации составляется и ведется сортировочный лист, натурный лист
на отправляемые поезда, учитывается наличие вагонов и поездов в парке;
прогнозируется текущая работа станции и пр.
В
области развития пассажирских перевозок наибольшее развитие получила
система «Экспресс». В функциональном
плане система управляет ТП пассажирского хозяйства: информационно-справочное обслуживание
пассажиров; оформление и учет багажа; управление парком пассажирских вагонов,
включая эксплуатацию и ремонт; предоставление сервисных услуг пассажиров и др.
В
управлении экономикой и финансами (КИТ2) реализована единая корпоративная
система управления финансами и ресурсами (ЕК АСУФР) на основе программного
обеспечения R/3
фирмы SAP
AG.
Она обеспечивает [4] контроль и анализ финансово-хозяйственной деятельности предприятия.
Система охватывает несколько сфер деятельности: бухгалтерский учет; управление
финансовыми потоками, затратами, основными фондами, производством, материально-техническими
ресурсами, инвестициями, проектам, персоналом, включая расчет заработной платы;
реализацию продукции и услуг. Таким образом, это единая система управления
крупным предприятием. Система SAP R/3 реализована в трехуровневой
архитектуре клиент-сервер.
Все
информационные потоки, зарождающиеся на линейных предприятиях различных
отраслей ж.-д. транспорта, стекаются в ИВЦ. Основу программно-технического
комплекса ИВЦ составляет ЭВМ IBM-9672 с дисковыми массивами общей емкостью
2,7 Тбайт, производительностью 345 mips и ОС/390. Управление информационными
потоками между подсистемами осуществляется с помощью применения сетевых технологий.
Сеть передачи данных МПС – сложная разветвленная структура, включающая
региональные и периферийные узлы, различные АРМ линейных подразделений.
В
хозяйстве сигнализации, централизации и блокировки (СЦБ) находится в
эксплуатации огромное число АРМ, большая часть
которых включена в корпоративную дорожную и локальные сети и решает задачи
КИТ3. Система позволяет осуществить: планирование, контроль и анализ выполнения
организационно-технических мероприятий по повышению безопасности движения;
подготовку мероприятий к зиме; планирование и анализ выполнения капитального
ремонта; анализ состояния рельсовых цепей (РЦ) по ежедневным, недельным,
месячным данным для каждой станции; учет и анализ повреждений приборов СЦБ,
вызвавших сбои или отказы в работе устройств; оперативный учет отказов устройств
СЦБ, ПОНАБ, САУТ, АЛСН, связи, радиосвязи; организацию технологических окон.
В
состав АСУ-Ш-2 входят функциональные комплексы задач: общесетевые, дорожные,
уровня дистанций (ШЧ) и обеспечивающие подсистемы: подсистема формирования и
ведения БД коллективного пользования
АСУ-Ш-2 и подсистема взаимодействия с другими автоматизированными
интегрированными системами железнодорожного транспорта.
Комплекс
«Учет и анализ нарушений работы устройств
автоматической локомотивной сигнализации и системы автоматического управления
тормозами» (КЗ-АЛСН) предназначен для ведения учета и анализа информации о
нарушениях работы устройств АЛСН, САУТ, комплексных локомотивных устройств
безопасности (КЛУБ) с передачей и интеграцией данных по вертикалям ТЧ-ШЧ-Ш-ЦШ.
Комплекс
«Учет и анализ состояния (РЦ) по
конструктивным признакам» (КЗ-РЦ) представляет специалистам и руководству
подразделений хозяйств СЦБ и пути на всех уровнях информацию о состоянии (РЦ). При этом первичная информация о
состоянии РЦ по конструктивным признакам (соединители, балласт, смазка)
вводится в базу данных в ШЧ на основании
совместных актов ШЧ и дистанции пути (ПЧ) и записей в журнале ДУ-46 с
последующей передачей и интеграцией по вертикалям ШЧ-НОДШ и ШЧ- ШЦ-ЦШД.
Комплекс «Разработка
и контроль выполнения специализированных
организационно-распорядительных документов» (КЗ-ОРД-Ш) охватывает весь
спектр работ по автоматизации сбора предложений, формирования, распечатки,
рассылки и контроля исполнения
общесетевых планов и мероприятий по повышению безопасности движения поездов,
подготовке устройств к зиме, капитальному ремонту, предотвращению умышленных
порч и краж оборудования СЦБ, повышению надежности функционирования РЦ.
Программа предназначена для работников
ШЧ, службы Ш, НОД и ЦШ.
Комплекс
«Учет и анализ отказов, повреждений и
неисправностей устройств ЖАТС»
(КЗ-УО-ЖАТС) автоматизирует функции учета
отказов с передачей данных по вертикалям ШЧД-ШД и ШЧД-НОДШ.
Комплекс
«Учет и анализ технической
оснащенности устройствами ЖАТ с ведением паспортов по объектам»
(КЗ-ТехОС-Ц) должен формировать базу данных и оснащенности объектов
обслуживания ШЧ системами СЦБ,
дистанционного контроля подвижного состава и иными устройствами автоматики и
телемеханики (АТ). База предназначена
для анализа технической оснащенности дистанции с выдачей отчетных и справочных форм, а также для использования рядом других задач АСУ-Ш-2.
Основными
задачами комплекса «Технико-экономическое обеспечение работы хозяйства Ш» (КЗ
ТЭО-Ш) являются: расчет работ в технических
единицах; расчет нормативной численности
работников ШЧ; оценка качества ТО
устройств ЖАТС.
Комплекс
«Планирование, оптимизация, нормирование
и контроль исполнения работ по ТО
устройств ЖАТ» (КЗ КТО- ЖАТС)
охватит весь спектр работ по ТО
устройств СЦБ, проводной связи, радиосвязи, устройств механизации и автоматизации сортировочных горок (ГАЦ) и иных
устройств АТ, выполняемых линейными подразделениями СЦБ и связи
и контролируемых диспетчерским
аппаратом ШЧ и Ш. Комплекс включает функции планирования и контроля
исполнения работ в соответствии с нормативной базой ЦШ и
дорог.
Комплекс
«Учет приборов и планирование работы РТУ» (КЗ УП –РТУ) включает четыре
задачи для ремонтно-технологических
участков (РТУ СЦБ), контрольно-ремонтных пунктов ( КРП-АЛСН), РТУ радио,
РТУ метрологии. Базы данных (БД) передаются
в службы Ш и НИС для контроля за наличием
и состоянием приборов,
перемещения их между дистанциями и т.д.
Комплекс
«Ведение технической документации по СЦБ» (КЗ-ВТД-Ш) включает три задачи:
− ведение
БД в ШЧ, Ш с возможностью объединения
баз дистанций в службе;
− доступ
к базам данных специалистов хозяйства Ш и, возможно, специалистов других служб
и хозяйств железной дороги;
− работу
с базами технической документации, входящими в СБД-Ш.
В
комплекс «Ведение журналов диспетчера
дистанции» (КЗ ИО-ШЧД) входят задачи ведения журналов, закрепленных за
диспетчером ШЧ (ШЧД) согласно положения ЦШ-601, журналов учета состояния устройств,
неисправности которых не могут быть устранены немедленно и требуется контроль
со стороны в течение длительного времени. В состав КЗ ИО-ШЧД входят задачи,
позволяющие вести такие журналы как, например, журнал учета разрешений на
производство работ с выключением устройств СЦБ и учета распоряжений. Помимо
ведения журналов данный комплекс выполняет функцию оперативного анализа выполнения
работ с выключением устройств на дистанциях.
Комплекс
«Анализ и прогнозирование состояния
устройств ЖАТ» (КЗ ПСУ ЖАТ) предназначен для прогнозирования периодов
безотказной работы устройств ЖАТ, сроков выхода параметров устройств за пределы
нормативных значений. Основная задача КЗ ПСУ ЖАТ состоит в выполнении функции
прогнозирования отказов устройств на основе комплексного анализа следующих
данных статистики отказов и иных нарушений работы, отслеживания технических
параметров устройств, данных о выработке ресурса.
Комплекс
«Организация работ по поиску и устранению
отказов устройств ЖАТ» предназначен для автоматизации функций ШЧД и электромехаников
(ШН) по сбору информации, организации работ и принятию решений по поиску и
устранению отказов.
Задача
«Формирование рекомендаций по
планированию технического обслуживания» формирует рекомендации по
планированию ТО на базе результатов, полученных при решении задачи «Организация работ по поиску и устранению
отказов устройств ЖАТ».
Одним
из основных требований, предъявляемых к АСУ является обеспечение гибкости
при выполнении различных плановых заданий. Значительные объемы используемой информации и большая размерность решаемых задач требуют пристального
внимания к организации сбора данных. Сбор информации представляет собой ничто иное, как процесс
измерений.
Обследование
технологической цепочки прохождения
отчетной информации от линейных
предприятий до отделения и управления дороги
показало, что во всех
звеньях технологии присутствуют
рутинные операции. К таким операциям
относятся сбор информации по телефону, запись данных в журнале, подсчеты итогов, передача их по
телефону, подготовка стандартных справок.
Автоматизация
рутинных операций обеспечивает перенос данных на машинные носители информации, снижает число обращающихся в системе оперативной отчетности
бумажных документов,
уменьшает потребности в дублировании
данных и их повторных вводах в ПЭВМ.
Широкое
внедрение на железнодорожном транспорте
персональных ЭВМ, развитие современных
средств передачи данных позволяет
найти более рациональной решение обработки оперативной информации [14]. Создание единой
информационной базы для различного круга задач избежать дублирования по вводу
информации и позволит доставить достоверные данные в центр ситуационного
управления при МПС (ОАО РЖД).