| |       |
Лекция 7. ПРИНЦИП ДЕЙСТВИЯ И ОСНОВНЫЕ
ПАРАМЕТРЫ ТОЧЕЧНЫХ ПУТЕВЫХ ДАТЧИКОВ
СЧЕТА ОСЕЙ
Надежная работа СЖАТ, имеющих в своем составе датчики для счета
осей (ДСО), во многом зависит от достоверности первичной информации, поступающей
от них. Например, ошибки в счете осей подвижного состава приводят к нарушению
контроля теплового состояния букс в эксплуатируемых сейчас системах ДИСК-Б,
ПОНАБ и КТСМ. В настоящее время имеются различные схемные и конструктивные
решения ДСО, отличающиеся по используемым видам систем и методам обработки
первичной информации. В дальнейшем познакомимся с некоторыми видами ДСО [2, 8,
15, 20].
В датчиках магнитного типа, информационный сигнал формируется на
основе эффекта электромагнитной индукции. Сигнал движения оси (биполярный
импульс напряжения) возникает при перемещении гребня колеса над датчиком.
Импульс достаточно просто обрабатывается электронными устройствами системы
(например, пороговыми) и отождествляется с проходом оси над датчиком. Амплитуда
импульса падает с уменьшением скорости состава, и при остановках колеса над датчиком
напряжение практически отсутствует, поэтому рассматриваемый, датчик имеет
информационное ограничение по скоростному диапазону [20].
Датчик прохода колес типа ПБМ-56, используемый в устройствах
обнаружения перегретых букс и на сортировочных горках. Принцип действия датчика
основан на наведении в катушке ЭДС индукции за счет изменения величины
магнитного потока при проходе гребня колеса 4 (рис.7.1) в воздушном зазоре.
Датчик состоит из кронштейна 1, катушки 2, постоянного магнита 3, скобы 6 и
соединительного кабеля 8. С помощью кронштейна, скобы и гайки 7 датчик
крепится к подошве рельса 5. Постоянный магнит установлен на кронштейне таким
образом, что его поток замкнут через кронштейн, рельс и воздушный зазор между
головкой рельса и одним из  полюсов
магнита.
полюсов
магнита.
Рис.
7.1. Датчик прохода колес ПБМ-56
Относительно простая конструкция датчика (магнит и обмотка)
обусловливает его невысокую стоимость. К недостаткам датчиков магнитного типа
можно отнести большие размеры, большое
содержание меди и наличие сильного магнита. Это провоцирует вандализм и, в конечном
счете, увеличивает затраты на обслуживание.
В момент приближения гребня колеса к зоне действия
датчика магнитный поток в цепи увеличивается и достигает своего максимального
значения, когда колесная пара находится над датчиком. При этом в катушке
индуктивности наводится колоколообразный импульс напряжения. Когда гребень
колеса удаляется из зоны действия датчика, магнитный поток в цепи уменьшается
и датчик вырабатывает импульс напряжения обратной полярности. Амплитуда и
длительность выходных сигналов датчика определяются скоростью изменения
магнитного потока, т. е. скоростью движения поезда. Нижний предел скорости
движения поезда, при котором сигналы с датчика превышают уровень наводок составляет
5 км/ч.
В магнитоиндукционном точечном путевом датчике используется генераторный
первичный преобразователь, основанный на принципе электромагнитной индукции, закон
которой выражается формулой
 (7.1)
где
(7.1)
где ![]() – индуктируемая в катушке электродвижущая
сила (ЭДС);
– индуктируемая в катушке электродвижущая
сила (ЭДС); ![]() – число витков в катушке;
– число витков в катушке; ![]() – магнитный поток пронизывающий витки катушки.
– магнитный поток пронизывающий витки катушки.
Вибродатчик является
виброизмерительным пpеобpазователем инерционного действия с пьезоэлектрическим
чувствительным элементом, работающим в режиме акселерометра. Амплитуда
электрического сигнала на выходе
акселерометра прямо пропорциональна амплитуде ускорения рельса, к которому
крепится вибродатчик [52] .
Вибpодатчик состоит
из двух основных частей: державки и акселеpометpа с соединительным
радиочастотным коаксиальным кабелем. Принцип действия акселеpометpа основан на
использовании прямого пьезоэффекта, то есть свойства пьезокерамики
генерировать электрический заряд под действием приложенной к пьезоэлементам
механической силы.
При установке
вибpодатчика на подошву рельса корпус акселеpометpа будет воспринимать вибрацию рельса. Если,
например, корпус будет перемещаться вверх, то, вследствие стремления
инерционного груза сохранить состояние покоя, пьезоэлементы под действием силы
F = ma (где m - масса инерционного груза; a
- ускорение рельса) будут сжиматься.
Возникающий при этом на
электродах пьезоэлементов электрический заряд Q пропорционален амплитуде
ускорения. Напряжение U на входе
виброизмерительного усилителя прямо
пропорционально заряду Q и обратно пропорционально электрической емкости
С, равной сумме емкостей акселерометpа с
выводным кабелем Са, внешнего
соединительного кабеля Ск
и входной цепи согласующего усилителя Су
 , (7.2)
, (7.2)
где
![]() - пьезомодуль керамики ЦТС-19.
- пьезомодуль керамики ЦТС-19.
Коэффициент преобразования акселерометpа по
напряжению равен
 , (7.3)
, (7.3)
где ![]() и
и ![]() -
соответственно пиковые значения напряжения на выходе акселерометpа и ускорения
(в единицах g - ускорение свободного
падения, g = 9.8 м/с2),
вызвавшего появление сигнала напряжением Uп.
-
соответственно пиковые значения напряжения на выходе акселерометpа и ускорения
(в единицах g - ускорение свободного
падения, g = 9.8 м/с2),
вызвавшего появление сигнала напряжением Uп.
Таким образом, напряжение сигнала на выходе
акселеpометpа будет:
![]() , мВ , (7.4)
, мВ , (7.4)
Так как акселеpометp
соединяется с виброизмерительным усилителем, имеющим входную емкость Су, дополнительным
коаксиальным кабелем с погонной емкостью Ск,
то коэффициент преобразования акселеpометpа, приведенный ко входу ВИУ, можно
определить по формуле:
 , (7.5)
, (7.5)
где ![]() - собственная емкость акселерометра с
инвентарным соединительным кабелем (с
которым производилась его калибровка), пФ;
- собственная емкость акселерометра с
инвентарным соединительным кабелем (с
которым производилась его калибровка), пФ; ![]() - погонная емкость
дополнительного кабеля, пФ/м;
- погонная емкость
дополнительного кабеля, пФ/м; ![]() - емкость входной цепи
усилителя (масштабного конденсатора, шунтирующего вход согласующего
усилителя), пФ.
- емкость входной цепи
усилителя (масштабного конденсатора, шунтирующего вход согласующего
усилителя), пФ.
Из приведенных формул
видно, что для обеспечения высокой чувствительности виброизмерительного тракта
необходимо стремиться к уменьшению длины соединительных кабелей и емкости
масштабного конденсатора.
Виброизмерительный
усилитель предназначен для масштабного усиления
сигналов вибродатчиков (пьезоакселерометров), пропорциональных
ускорениям рельсов, двухкратного интегрирования этих сигналов для получения
вспомогательного сигнала, пропорционального виброперемещениям рельсов, и формирования
выходного диагностического сигнала по максимальному значению (модулю)
виброускорений или виброперемещений рельсов при динамическом воздействии их с
дефектным колесом.
Если при ударе колеса
с ползуном глубиной 1,0 мм возникают ускорения рельса порядка 200 (для
грузового вагона в зимних условиях), то на входе согласующего усилителя будет
сигнал амплитудой 0,6÷1,8 В в зависимости от коэффициента
преобразования акселерометров, подобранных в комплект ДИСК-К.
Следующая группа датчиков характеризуется формированием информационных
сигналов о движении оси вагона путем амплитудной модуляции выходного
напряжения ДСО. К их числу относятся датчики индуктивного типа [20].
Чувствительным элементом датчика являются катушки индуктивности, параметры
которых изменяются при движении колеса над ними. Катушки питаются переменным
током. Выходной сигнал датчика — амплитуда напряжения.
ДСО с использованием амплитудной модуляции имеют тот же недостаток,
что и датчик магнитного типа. Передаваемая ими информация искажается под действием
электромагнитных помех, следовательно, не обеспечивается передача информации
об осях на большие расстояния (сотни метров, километры).
Потребность в передаче информационного сообщения на эти расстояния
вызвана активным внедрением на дорогах систем контроля занятости перегона на
основе ДСО. При этих системах датчики устанавливаются на границах станции, а
станционные блоки размещаются в помещениях.
Датчик представляет собой две катушки индуктивности, монтируемые
по разным сторонам шейки рельса напротив друг друга. Катушки имеют длину 600
мм и подключаются специальным антивибрационным кабелем к блоку преобразования,
размещенному в нескольких метрах от рельса. В блоке формируется напряжение
питания катушек и выходное напряжение ДСО преобразуется в помехозащищенный
сигнал.
При отсутствии колеса над датчиком выходное напряжение с катушек
индуктивности преобразуется в две частотные последовательности
импульсов. Выходы формирователей последовательностей согласуются с
соединительными проводами питания "счетного пункта". В станционной
части системы две частотные последовательности выделяются фильтрами.
От движения колеса над датчиком изменяется коэффициент взаимоиндукции
и, в зависимости от направления движения, исчезает одна или другая частотная
последовательность. Формирователи "счетного пункта" отключают
частотные последовательности в процессе движения и при остановках. В
станционных счетчиках осей определяется пропадание частотного сигнала, по
которому устанавливается направление движения и выполняется счет осей.
Многофункциональный датчик (МФД) с
частотно-модулированным выходным сигналом разработан и эксплуатируется на
Октябрьской железной дороге. На основе МФД и специального электронного блока
преобразования сигнала (конвертера)
изготовлены комплекты аппаратуры для системы ДИСК-Б, информационная система контроля
занятости перегона, комплект аппаратуры для счета вагонов в отцепах.
Датчик имеет небольшие габариты
(210х80х30), массу 700 г и содержит 14 транзисторов. Датчик работоспособен в
широком температурном диапазоне ( - 50… +650С), виброустойчив и
герметичен, устанавливается внутри колеи между шпал. Широкая поверхность
датчика ориентирована к зоне движения гребня посредством крепежного устройства
массой 1,5 кг. Небольшая потребляемая мощность (2 Вт) и выходные токовые импульсы
свыше 50 мА допускают установку датчика на расстоянии до 5 км от системы
автоматики. Для подключения датчика к системе достаточно двух кабельных жил. По
этим жилам подается питание и передается информационный сигнал. Для установки
датчика требуется несколько минут и в ходе эксплуатации практически не
обслуживается.
Для модуляции сигнала используются два электронных генератора.
Небольшие катушки индуктивности генераторов расположены вдоль широкой поверхности
датчика вблизи зоны движения гребня и разнесены друг от друга на расстояние в
несколько сантиметров. Движущийся над поверхностью датчика гребень изменяет
частоты генераторов и вызывает изменение выходной частоты прямоугольных
импульсов датчика. Схемное решение датчика выполнено так, что совместно с
частотной модуляцией происходит модуляция длительности выходного импульса. Это
дополнительно повышает помехозащиту и информативность МФД. В результате многолетней
эксплуатации датчиков было установлено, что для колес вагонов средняя
градуировочная характеристика имеет вид, показанный на рис.7.2. Использование
зависимости выходной частоты от положения оси колеса над датчиком расширяет
информационные свойства датчика, так как в процессе движения оценивается их
взаимное положение. Рассмотрим наиболее простой критерий определения прохода
оси над датчиком. Считаем, что ось прошла, если частота изменялась
относительно начального значения Fo как в большую, так и в меньшую сторону.
Например, при движении колеса в сторону увеличения координаты L происходит последовательное
изменение частоты от Fo до значения F+, затем снова снижается до значения Fo (центр оси совпадает с
центром датчика по вертикали) и, наконец, после уменьшения частоты до F- вновь увеличивается до
значения Fo. При движении колеса в другом направлении изменение частоты
происходит в обратном порядке. Остановка колеса над датчиком определяется как
длительное получение частоты одного значения, например, Fост.

Рис.7.2. Градуировочная
характеристика многофункционального датчика с
частотно- модулированным
выходным сигналом
Частотно-модулированный сигнал может обрабатываться средствами
вычислительной техники, так как достаточно просто преобразуется в код. Однако
существование большого количества систем, воспринимающих сигнал о движении оси
в виде импульса напряжения, потребовало для согласования с ними соответствующего
преобразования.
Преобразование частотного сигнала МФД в импульс напряжения
происходит в конвертере, функциональная схема которого приведена на рис. 7.3.
Кроме предоставления информации об осях, в конвертере предусмотрены другие
информационные выходы, которые допускают использование МФД в существующих и
разрабатываемых системах.

Рис. 7.3. Схема преобразования частотного сигнала МФД
МФД запитывается от источника питания линии (ИПЛ) через измерительный
резистор Rи и
двухпроводную соединительную линию. На измерительном резисторе выделяется
напряжение, определяемое током потребления МФД и его выходными прямоугольными
токовыми импульсами.
Источник питания конвертоера (ИПК) формирует напряжение питания
для остальных элементов.
После прохождения импульсов через интегрирующую цепь (ИЦ) прямоугольная
последовательность преобразуется в пилообразную. Это позволяет настроить
компаратор (К) на оптимальный прием и через гальваническую развязку (ГР1)
формировать импульсы на входе порта Р1.1 микропроцессорного контроллера (МК).
МК обрабатывает мгновенные значения частотного сигнала МФД за время, равное
периоду следования входных импульсов порта Р1.1.
Алгоритм обработка сигналов МФД включает в себя измерение текущих
значений периода и длительности импульсов, сравнение их с исходными значениями
и установление факта изменения (неизменности) частоты. Каждый период в МК
принимается решение о движении оси, для чего сравниваются результаты
обработки периода и длительности импульсов. Окончательное решение принимается
по результатам сравнений за несколько периодов. Такой способ эквивалентен
обработке сигналов датчика по нескольким каналам и создает информационно надежную
систему. Во время движения колеса над датчиком в МК отслеживаются изменения
выходной частоты датчика на соответствие градуировочной характеристики и
определяется время движения гребня через зону чувствительности МФД. После
установления факта прохода колеса формируется импульс напряжения оси,
например, через разряд DO
регистра РГ.
Выходные информационные сигналы конвертера передаются в систему
через гальванические развязки ГР2—ГР4, выполненные на оптоэлектронных парах
типа АОТ123. Выходной фототранзистор оптопары управляется записью
соответствующего бита в выходные разряды регистра РГ.
Длительность импульса оси устанавливается программно. Для системы
ДИСК-Б нужен биполярный импульс длительностью, равной времени движения гребня
над датчиком. Формирование импульса другой полярности на "Вых. 2".
обеспечивается источником питания Е2 с полярностью, противоположной Е1. После
окончания импульса с "Вых. 1" (в разряд DO установлен логический 0) в разряд D1 контроллер записывает
логическую 1, формируя импульс противоположной полярности на "Вых.
2". Длительность этого импульса также равна времени движения колеса над
датчиком. Для системы ДИСК-Б оба выхода объединяются.
В системах ГАЦ, учитывающих направление движения, второй выход
используется для указания направления движения. На этом выходе импульс
напряжения формируется синхронно с импульсом оси только в случае движения в определенном
направлении, например, с горки.
Третий выход "Вых. 3" конвертера предназначен для диагностики
работоспособного состояния МФД и конвертера со стороны системы. Вид сигнала
диагностики определяется конкретной системой. Представление работоспособного
состояния в виде логической 1 определено требованием использования МФД в
системах, обеспечивающих безопасность движения.
После подачи напряжения питания и выхода МК на рабочие алгоритмы в
разряде D2 инвертируется
бит синхронно с поступлением импульсов датчика. Формирователь динамической
единицы (ФДЕ) при поступлении импульсов с разряда D2 регистра зажигает диод
гальванической развязки ГР4, устанавливая логическую 1 на "Вых. З".
Прекращение появления импульсов на выходе D2 приводит к установке логического
0 на "Вых. З", свидетельствуя о нарушении работы конвертера или датчика.
Аппаратно-программные средства конвертера выявляют основные отказы
и информируют об этом систему. Нарушение функционирования МФД может выражаться
в изменении тока потребления или в существенном отличии частот от значений, определенных
градуировочной характеристикой. Настройка компаратора и выбор определенных параметров
интегрирующей цепи выявляет отказы, выраженные через изменения тока потребления
датчика. Определение этого отказа, как и выявление отказа от существенного
изменения частоты, происходит в микропроцессорном контроллере на программном
уровне, позволяя МК снимать посылку импульсов в разряд D2. Отказы в ИПЛ, ИПК,
обрывы соединительной линии и выход из строя компаратора также вызывают
появление сигнала о неработоспособном состоянии [20].
Позиционный отказ (например, из-за несанкционированного съема МФД
с рельса) обнаруживается в МК через изменения тока потребления или частоты.
Для этого разработаны крепежные устройства МФД, обеспечивающие изменение
одного из этих параметров при его демонтаже. Введение сигнала с ФДЕ в цепь
"Вых. 3" позволяет системе получать сведения об отказах в работе МК
при "зависании" программ или выходе контроллера из строя (в этом
случае прекращается изменение значения бита в разряде D2). Исключению
"зависаний" способствует генератор сброса ГС, формирующий импульс
сброса при "сбоях" программы МК.
Основные элементы конвертера расположены на плате размерами
100х80 мм. Стабилизаторы источников питания выносятся на отдельную
металлическую пластину. В качестве МК используется микросхема АТ89с51,
позволяющая выполнять обработку сигналов МФД при максимальных скоростях
движения 50—70 м/с.
На основе МФД и конвертеров изготовлены, всесторонне испытаны и
введены в эксплуатацию комплекты аппаратуры для систем ДИСК-Б, информационная
система контроля занятости перегона, комплект аппаратуры для счета вагонов в
отцепах.
Чувствительным элементом датчика
являются катушки индуктивности, параметры которых (взаимная индуктивность)
изменяются при движении колеса над ним. Выходным сигналом датчика является
амплитуда переменного тока. В данной конструкции датчика переменное магнитное
поле, создаваемое передающей катушкой W1
(рис. 7.4), пересекает витки приемной катушкой W2, расположенной на другой стороне рельса и генерирует в ней
ЭДС выходного сигнала.
Форма и расположение обоих катушек и их
ферритовых сердечников образуют два магнитных потока Ф1 и Ф2,
проходящих через первичный преобразователь (обмотку W2) в противоположных направлениях. При отсутствии колеса
преобладает поток Ф1, который и индуктирует выходной сигнал в виде
переменного напряжения Uвых.
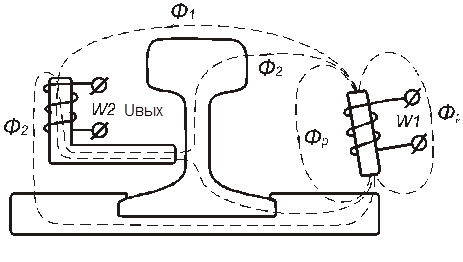
Рис. 7.4. Индукционный электромагнитный путевой датчик
Магнитный поток катушки, без учета магнитного
потока рассеивания (Фр), определяется выражением
 ,
(7.6)
,
(7.6)
где: Rст
– суммарное магнитное сопротивление всех
ферромагнитных участков магнитопровода (по которым замыкается магнитный поток
пронизывающий обе катушки);Rв
- магнитное сопротивление всех воздушных промежутков по которым замыкается
магнитный поток Ф1 пронизывающий
обе катушки; lст –
длина ферромагнитных магнитопроводов; lв –
длина воздушных промежутков магнитопровода.
Подставляя значение уравнения 7.6 в
уравнение 7.1, получим уравнение для определения ЭДС, наводимой в обмотке W2
первичного преобразователя магнитным потоком Ф1
 , (7.7)
, (7.7)
где: ![]() - число витков передающей катушки (источника
связующего
- число витков передающей катушки (источника
связующего
магнитного поля); ![]() - число витков
приемной катушки;
- число витков
приемной катушки; ![]() - эквивалентная
площадь катушки первичного преобразователя (приемной катушки);
- эквивалентная
площадь катушки первичного преобразователя (приемной катушки); ![]() - круговая частота;
- круговая частота; ![]() - амплитудное значение
переменного тока передающей катушки; К
< 1 – коэффициент связи обмоток, учитывающий соотношение
магнитных потоков полного (с учетом потоков рассеивания) и сцепляющегося с
приемной катушкой.
- амплитудное значение
переменного тока передающей катушки; К
< 1 – коэффициент связи обмоток, учитывающий соотношение
магнитных потоков полного (с учетом потоков рассеивания) и сцепляющегося с
приемной катушкой.
Аналогично, с учетом своих составляющих
воздушных промежутков и ферромагнитных магнитопроводов, можно определить
значение магнитного потока Ф2 и ЭДС, наводимую этим потоком в катушке
W2.
Если между катушками датчика проходит
колесо, то его металлическая масса изменяет направление и действует как экран
для потока Ф1, который уменьшается в катушке W2. Разность ЭДС в приемной катушке, индуктируемых потоками Ф1
и Ф2, снижается до нуля, что и является сигналом счета оси выдаваемого
точечным путевым датчиком.
По такому принципу построены точечные
путевые датчики в некоторых системах СЦБ фирмы SEL. Для повышения безопасности в системах
железнодорожной автоматики, использующих счетчики осей для контроля участков
пути, применяют два последовательно расположенных датчика, размещенных в общем
корпусе. Такая конструкция датчика позволяет повысить достоверность фиксации
проследования каждой колесной пары методом сравнения результатов и определить
направление движения подвижной единицы по последовательности их срабатывания.
Изменяя взаимное расположение
передающих и приемных катушек, а так же частоту генерируемого сигнала можно
создать индукционный электромагнитный путевой датчик, у которого при проходе
колеса сигнал в приемных катушках возрастет. По такому принципу построен датчик
в системе счета осей AzS 350 фирмы "SIEMENS".
Путевой датчик (ПД) типа ДПЭП системы
УКП СО является источником первичной информации о количестве осей подвижного
состава, которые проследовали по участку пути, контролируемому датчиком
занятости участка пути (РЦ). Датчик [43, 20] представляет собой
электромагнитную систему с переменными параметрами, входным электрическим
сигналом которой является высокочастотное переменное напряжение генератора,
расположенного в аппаратуре счетного прибора (СП) [45]. Напряжение выходного
сигнала ПД зависит от параметров магнитной системы, которые изменяются при
появлении и проследовании колеса над датчиком.
Упрощенный чертеж, поясняющий принцип действия
ПД, приведен на рис.7.5. На питающий вход ПД подается высокочастотное
переменное напряжение Uген
частоты fген = 71,4 кГц. На рельсе 1 условно
показано колесо 2 подвижного состава. Параллельно оси рельса 1 расположен
индуктор 3, по которому протекает ток iинд,
создающий в пространстве около рельса 1 и колеса 2 переменное магнитное поле.
Это поле создает в выходной катушке 4 напряжение Uвых, величина которого зависит от магнитного сопротивления цепи
между индуктором 3 и катушкой 4. Отсутствие или наличие колеса в этом
пространстве изменяет это магнитное сопротивление и взаимоиндуктивность Ми-к
между индуктором 3 и катушкой 4, что вызывает изменение величины выходного
напряжения датчика Uвых [47, 48].
Эквивалентная электрическая схема ПД,
соответствующая рис. 7.5, а приведена на рис. 7.5, б. Здесь емкость СЭ1
эквивалентно представляет собой сумму емкостей С1 (см. рис. 7.5, а)
и распределенной емкости жил кабеля от ПД до СП, а емкость СЭ2 –
эквивалентную емкости других жил того же кабеля. Величина взаимоиндуктивности Ми-к,
как было сказано, зависит от наличия или отсутствия колеса над магнитной
системой ПД [49].

Рис. 7.5. Упрощенная конструкция и эквивалентная схема
путевого датчика устройства контроля
перегона методом счета осей УКП СО
Согласование уровней токов и напряжений
в электрической цепи генератора и индуктора осуществляется при помощи трансформатора
ТV.
Он выполнен на тороидальном ферритовом сердечнике. Его первичная обмотка w1 содержит 20 витков, вторичная w2 – 1 виток. Для повышения эффективности работы датчика в его
входную цепь включен резонансный контур, образованный индуктивностью обмотки w1 и емкостью конденсатора С1, настроенный на
частоту fген.
Таким образом, как видно из схемы рис.
7.5, если остальные параметры схемы неизменны, то выходное напряжение Uвых датчика определяется только величиной взаимоиндуктивности Ми-к,
изменения которой на величину DМи-к, вызванные наличием или
отсутствием колеса, приводят к появлению изменения напряжения выходной катушки
ПД на значение DUвых.
Наличие высокочастотного напряжения Uген и соответствующего ему тока iинд в индукторе накладывает ряд особенностей на процессы работы
ПД. В первую очередь это вызвано тем, что металлические массы колеса при воздействии
на них переменного высокочастотного магнитного поля изменяют свои магнитные
свойства за счет увеличения потерь на перемагничивание, гистерезис, проявление
поверхностного эффекта и т.д. Эти изменения приводят к тому, что наличие колеса
в магнитной цепи датчика становится эквивалентным внесению в нее массы, близкой
по свойствам алюминиевой (или, например, медной, латунной). Поэтому имитатор
колеса, используемый при технологических проверках ПД, выполнен в виде
алюминиевой пластины. Снижение частоты fген напряжения питания датчика, при котором масса колеса будет
проявлять ферромагнитные свойства, нежелательно из-за значительного снижения
чувствительности датчика.
Практическая конструкция и
электрическая схема путевого датчика существенно сложнее. Это обусловлено двумя
обстоятельствами. Первое из них заключается в том, что изменения выходного
напряжения DUвых, обусловленные проследованием над выходной катушкой колеса,
малы и не превышают нескольких сотен милливольт при наличии постоянной
амплитуды переменного напряжения на выходе катушки Uвых =10…15 В. Поэтому для надежного выделения столь
относительно малого значения напряжения DUвых применен дифференциальный способ выделения полезного
сигнала, что потребовало введения дополнительной выходной катушки.
В настоящее время на отечественных
железных дорогах и за рубежем в системах счета осей наибольшее распространение
нашли индукционные датчики, которые обеспечивают работоспособность в
разнообразных климатических условиях, при наличии мощных магнитных полей
тягового тока и полей тяговых двигателей и не оказывают заметного
биологического воздействия на окружающую среду.
Индукционные датчики в силу простоты их
схемных и конструктивных решений и, как следствие повышенной надежности
являются наиболее распространенным типом бесконтактного датчика и применяются
на железных дорогах многих стран в двух основных модификациях: магнитоиндукционных
(с источником связующего поля – постоянным магнитом) и индукционных
электромагнитных (с переменным магнитным полем).
Существенный выигрыш по информационным
и эксплуатационным показателям может быть достигнут при использовании частотных
параметрических модуляторов в путевых датчиках. В датчиках такого класса фиксация
прохождения колесной пары осуществляется изменением одного из параметров
генератора (например, индуктивности приемной катушки), что приводит к изменению
частоты генерируемых колебаний.